4
ю ел ел
;о
Изобретение относи 1 ся к области теплоэнергетики и может быть применено при регулировании подачи топлива в многотопочные котельные агрегаты.
Цель изобретения - улучйени(5 динамических харалстеристик регулятора,
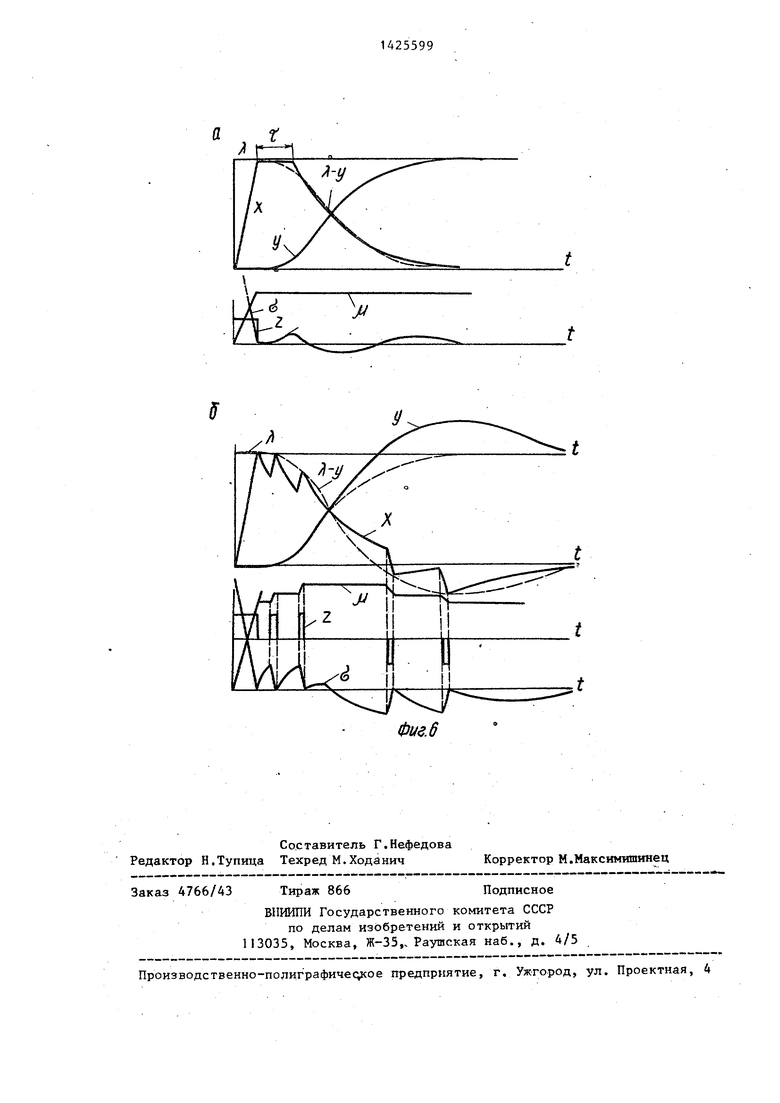
На фиг.1 изображена принципи-аль- ная схема регулятора; на фиг.2 - функциональная схема замкнутой сие- Q темы автоматического регулирования с данным регулятором| на фиг.З - пе- реходные процессы в регуляторах при скачкообразных возмущениях на входах; на фиг,4 - то же, при линейно нарас-. j тающих возмущениях;, на фиг,5 - амплитудно-частотные характеристики замкнутых систем-регулирования на фиг,6 переходные процессы в замкнутых системах регулирования при скач- уп кообразном изменении задающего сигнала,
Регулятор (фиг.1) содержит устройство 1 сравнения, усилитель 2, обмотки 3 и 4 управления первого и второ- 25 го фазочувствите.льньгх реле, первый 5 и второй 6 разделительные диоды8 устройство 7 обратной связи, конденсатор Sj резистор 9 зарядаS замыкающие с задержкой на замыкание контакты 10 промежуточного реле, резистор 11 разряда, размыкающие контакты 12 .промежуточного реле, потенциометр 13, замыкающие контакты 14 и 15 первого и второго фазочувствительных реле, обмотка 16 управления промежуточного 35 реле размыкающие контакты Т7 и 18 первого и второго фазочувствительных реле, источник 19 напряжения питания, первые 20 и вторые 21 сигнальные лампы, первая 21s вторая 23 и третья 24 0 выходные клеммы регулятора.
Система (фиг,2) содержит устройст- , во 1 сравнения, устройствЬ 7 обратной связи, релейный усилитель 25, испол- нительный механизм 26 постоянной ско- 5 рости, объект 27 регулирования, уст- ройство -28 обратной связи известного регулятора,
На фиг , 2-6 приняты следующие обозна- Q чёяйя сигналов: у - регулируемый параметр (выходная величина объекта 27 регулирования); х - выходная величина устройства 7 обратной связи (направление, снимаемое с конденсатора уст ройства 7 обратной связи); Л - задающая величина; (5 - входная величина релейного усилителя 25, где С5 Z - выходная величина релейного уси30
Q п
5 5 0
, 5
Q
0
лителя 25, имеющая два значения: единица, когда релейный усилитель 25 сработал, и нуль, когда отпущен; /ч - выходная величина регулирующего воздействия регулятора (перемещение исполнительного механизма 26 постоянной скорости).
В квадрате релейного усилителя 25 условно показана графическая связь выходной величины z от входной величины G .
Срабаты1вание релейного усилителя
25происходит, когда G Л , где Л - порог срабатывания релейного усилителя 25, Отпускание происходит при , гдеДц-- величина возврата,
В дальнейщем будем считать, что величина Лц мала по сравнению с другю и величинами и что отпускание релейного усилителя 25 происходит при Сз 0,
Регулятор работает следующим образом,
При отклонении регулируемой вели- чины от заданного значения сигнал рассогласования с устройства 1 сравнения поступает на ycилиfeль 2, Усиленный сигнал подается на обмотки 3 и 4 управления первого и второго фазочувствительных реле, и при достижении порога срабатывания одно из реле включается. Контакты 14 или 15 включают исполнительный механизм
26на открытие или прикрытие регулирующего органа. Одновременно с этим размыкается один из контактов 17 или 18, снимая напряжение обмотки 16 управления промежуточного реле, которое отпускается, замыкая контактом
12 цепь заряда конденсатора 8, который через резистор 9 заряда заряжается по экспоненте от напряжения, снимаемого с потенциометра 13.
Напряжение, снимаемое с конденсатора 8, подается на вход устройства 1 сравнения, компенсируя возникшее до этого рассогласование. Сигнал на выходе усилителя 2 снижается и при достижении порога отпускания подтянутое до этого фазочувствительное реле отпускается, снимая напряжение питания с исполнительного механизма 26 и плдавая напряжение через размыкающие контакты 17 и 18 на обмотку 16 управления промежуточного реле, Это реле срабатывает и с вьщержкой времени, определяемой регулируемым замедлителем контактов 10, замыкает цепь разряда конденсатора 8 через резистор 11 .разряда.
По мере разряда напряжение на кон- . денсаторе 8 уменьшается. Подбором выдержки времени регулируемого замедлителя контактов 10 моделируется чистое запаздывание в объекте 27 регулирования при воздействии исполнительного механизма 26, а подбором величины сопротивления резистора 11 разряда моделируется скорость возвра- д щения регулируемой величины к заданному значению. Эти параметры подбираются таким образом, чтобы изменение сигналов регулируемой величины и об- ратной связи изменялись во, времени 15 одинаково. Чем ближе будут они совпадать, тем лучше будет качество регулирования.
Коэффициент усиления регулятора (длительность включения фазочувстви- тельных реле) регулируется потенцио- метром 13 и резистором 9 заряда.
Таким образом, по сравнению с из вестным регулятором, который не имеет задержки при разряде конденсатора 8, 25 предлагаемый регулятор точнее моделирует в обратной связи объекты 27 регулирования с запаздывагшями, что улучшает качество переходных процессов в замкнутом контуре и имеет ряд достоинств.
, Сравнение устройств обратной связи предлагаемого регулятора и известного позволяет условно считать последний частным случаем предлагае- мого решения при установке выдержки времени, равным нулю ().
20
30
35
.Характер работы предлагаем ого регу- ;лятора и известного при скачкообразном изменении входного сигнала пока- 40 зан на фиг.З. Изменение при этом величин Xj, nj и Z в известном регуляторе показано на фиг.За и в предлагаемом - на фиг.36,
Рассмотрим эти процессы более под-45 ,+Co, где С, и Со tgot- параробно для предлагаемого регулятора
Пусть на вход устройства 1 сравнения (фиг.2) подан скачкообразный сигнал л. На выходе устройства 1 сравнения появится сигнал 61, так как JQ сигнал с устройства 7 обратной связи пока равен нулю. Пусть также X будет больше порога срабатывания Л релейного усилителя 25 и, следовательно, ff Л , Тогда релейный усилитель 25 сработает и включит исполнительный механизм 26 постоянной с,корости ( 1), который будет линейно увеличивать величину (U. В это время (в мо55
метры настройки регуляторов. Однако положение изменяется, когда на вход регуляторов подается непрерывно изменяющийся сигнал, что и имеет место в реальных условиях.
На фиг.4 даны переходные процессы в регуляторах при линейно изменяю щихся во времени сигналах на юс вхо дах.
Легко убедиться, что в известном регуляторе не происходит принципиал ных изменений в переходных процесса при разных значениях скорости измен
5
5
0
0
5
0
мент времени t на фиг.Зб) включится . цепь заряда конденсатора 8, и по мере заряда конденсатора 8 напряжение на выходе устройства 7 обратной связи будет по экспоненте увеличиваться и вычитаться из входного сигнала К ,
Сигнал Д -х на входе релейного усилителя 25 будет уменьшаться, и при,достижении напряжения возврата релейный усилитель 25 разомкнется (момент времени t, на фиг.-Зб), величина z станет равной нулю, испол- нительньй механизм 26 остановится и |U прекратит свой рост, разорвется цепь заряда конденсатора 8, но еще не включится цепь разряда конденсатора 8, так как замыкающий контакт 10 замкнется с вьщержкой времени с , В это время напряжение обратной связи не изменяется (процесс на фиг.Зб). По истечении времени С (момент времени t,) замыкается контакт 10 и идет разряд конденсатора 8 через резистор 11 разряда по экспоненте . Другие величины при этом не изменяются. В момент времени t величина на входе релейного усилителя 25 становится равной его порогу срабатывания, и он срабатывает. Вновь пед5емещается исполнительный механизм 26 и заряжается конденсатор 8 через контакт 12 к резистор 9 (процесс t3-t4) и т.д.
На рис.За показана работа известного регулятора, в котором Е 0, и процесс разряда конденсатора 8 и,цет сразу после отключения релейного : усилителя 25. Сравнение этих процессов показывает, что в обоих случаях при скачкообразном изменении входно- То сигнала зависимость (t) принципиально не изменяется. Как в том, так и в другом случае реализуется ИИ-закон регулирования, так как
Q
5
метры настройки регуляторов. Однако положение изменяется, когда на вход регуляторов подается непрерывно изменяющийся сигнал, что и имеет место в реальных условиях.
На фиг.4 даны переходные процессы в регуляторах при линейно изменяющихся во времени сигналах на юс входах.
Легко убедиться, что в известном регуляторе не происходит принципиальных изменений в переходных процессах при разных значениях скорости измене1425599
НИИ входного сигнала При увеличении сопротнвлен -5я резистора 11 разряда скорость.разряда.уменьшаетсяS н при R-9 оа скорость.разряда становится равной нулю о Этот процесс {фиГо4а) иллюстрируется характером изменений Величин «Aj и х. При этом регулятор Осуществляет уже П-за«он регулирова Ыя, а не ПИ,
j Предлагаемый регулятор работает JO-разному 3 зависимости от скорости изменения входного сигнапй (),
При малой скорости изменения он сущёствляет ПИ-закон регулирова-ния
iTija Хцэ Zj) При ув.еличении скорос
ги изменения входного сигнала И-сос авляющая уменьшается и для случая Xqj, х J 24 становится исчезающе ма- 7.oftj а при дальнейшем увеличении скорости, изменения Л - совсем исче- кает ((455 х, 5 2..) .
: Следовательно9 предлагаемый регу Ья тор при мальпс скоростях изменения входного сигнала (низкочастотные в.оз .ущекия) реализует ГШ-закон регулирования s, при больших (высоко гастотные poз fyщeния) - П-закон регулирования,, рри этом с увеличением частоты И™ доставляющая непрерывно у ;еньшаетсяэ Ь: П составляющая остается без изме- ргений,
: При синусоидальном характере изме Неиня входного сигнала-Л-А sin t |Сгде А амплитуда колебакий, ш kacTOTa) И-составляющая нг;.чинает меньшаться при частоте
arcsin
&
(1)
А t A
порог срабатывания релейного усилителя 25 или зона нечув-, ствительности регулятора.
2,&
При частоте сОч arcsin -л f.i t1 2А
(2)
о i 2А
составляющая полностью исче зает.
Таким образом, переход от ПИ и И- .закону регулирования осуществляется между частотами сэ иЕЛка . э ресткостях частоты
«„
6
Ь1 . &. ГГ
-« - :tT5arcsin7- -arcsin- «7
I iАV 2А
1гА+ Ач 12А(3)
Для обеспечения перехода от одного закона регулирования к другому на частоте оЭг, необходимо установить в обратной связи регзшятора задержку времени
л- 1 Л. U
rrl sarcsin - -4- arcsin CjJp г.А .
Чтобы показать 5 какой вьшгрьш дает предлагаемый регулятор, построим амплитудно-частотные характеристики (АЧХ) замкнутой систе1-1Ы автоматического регулирования с разными законами регулирования.
В качестве объ екта 27 регулирования принято инерционное звено первого порядка с чистым запаздыванием.
Его передаточная функция
-tp
о - .L Т
где Т - постоянная времени инерционного звена|
с - время чистого запаздывания Р - оператор Лапласа« ИИ-регулятор жеет передаточную функцию
0
К где С,GO
С,Р+Ср
параметры настройки регуляторов (С,. - коэффициент П-составляшщейj Со - ко- дзффициент И-составляющей) .
Передаточная функция замкнутой системы регулирования по каналу вход- выход объекта регулирования имеет
5
W
.-ср
T2-t-P-5-(C,P-t-Co)e Амплитудно-фазовая характеристика (АФХ) замкнутой системы получается из WJP путем подстановки вместо оператора Р значения ju, где j - мнимое число;Q- частота.
Модуль этой АФХ является амплитудно-частотной характеристикой (АЧХ)
На фиг.5 даны расчетные АЧХ при следующих значениях параметров объекта регулирования:
И
20 с, о 20 с.
Оптимальные настройки ПИ-регулято- ра для этого объекта регулирования: С,0,932, ,034 с
Путем подстановки значений сэ от О до 0,16 получены следующие АЧХ: А({0), - замкнутой системы автоматического регулирования с ПИ-регулято- ром при С, 0,932, С(,0,034 с; АСоэ) замкнутой системы автоматического регулирования с П-регулятором при ,932 (прежнее значение), (интегральная составляющая отсутствует) ; A(w),, - разомкнутой системы автоматического регулирования при С,0 и , Это АЧХ объекта регулирования бе з регулятора.
При других объектах регулирования характер относительного расположения перечисленных АЧХ принципиально не изменяется.
Из фиг.5 видно, что в области низ шик частот от О дои, А((0;) А(и)2 , т.е. в этой области частот ПИ-регуля тор лучше подавляет возмущения, чем П-регулятор, В- области частот, больших G), , наоборот,А (со), А(сэ) , т.е. П-рёгулятор лучше подавляет возмуще- н ия, чем ПИ-pfeгyлятop. В области частот от О до СО2. А(&э), А(оо)о , а при (О 0, А(со, )0.
Это -говорит о том, что в этой области частот пи-регулятор снижает амплитуду колебаний на выходе объекта регулирования и при частотах, близких к нулю, подавляет их полностью (отсутствует статическая ошиб ка регулирования).
В области частот, больших 03, ПИ- регулятор не подавляет, а усиливает возмущения. Таким образом, для ПИ- регулятора диапазон частот от О до cfli является диапазоном эффективной работы регулятора.
Этот диапазон для П-регулятора, при том же значении С, расширяется до Qj и всегда больше, чем для ПИ-ре- гулятора. Предлагаемый .регулятор, работая в области низких частот как пи-регулятор, а в области высоких частот как П-регулятор, обладает, таким образом, достоинствами обоих типов регуляторов и не имеет их не« достатков.
,
Область частот, при .оторых происходит переход от одного закона регулирования к другому, может регулироваться временем регулируемого замедлителя замыкающего контакта 10-в цепи разряда конденсатора 8..
, В данном случае, чтобы обеспечить такой переход в точке 60, 0, при уровне возмущений, равном 5, зонам нечувствительности () нужно, согласно зависимости Х4), установить
1 С i W, 2А
- 2А-
20 с,
При этом переход от ПИ к П-закону регулирования начнется, согласно зависимости (1), при частоте
20
25
30
35
40
45
Г-1 - -
At 5й 20
о,оГ с,
а закончится, согласно зависимости (2), при частоте
WK f-jj -IQ 0,032 с
(фиг.5).
При этом АЧХ замкнутой системы рег улирования с предлагаемым регулятором будет иметь вид кривой А (ш), , показанной на фиг.5 пунктирной линией.
Может показаться, что частоты, больщие (J,, когда ПИ-регулятор теряет свои преимущества, являются.несущест- венны1-ш в спектре частот реальных возмущений, т.е. реальные возмущения, в основном, являются низкочастотными и преимущества предлагаемого регуля- j тора практически не могут быть ис- I пользованы. Однако это далеко не так. На современном технологическом оборудовании (например, мощных энергоблоках) устанавливается несколько систем автоматического регулирования, влияющих друг на друга и близких по динамическим свойствам. Такие системы автоматического регулирования, даже устраняя низкочастотные колебания, генерируют друг на друга возмущения с частотой, близкой к резонансной
(О
когда АЧХ имеет максимальное
pei
значение. В этих случаях очень важным является уменьшение АЧХ и в области резонансных частот. Таким образом, использование предлагаемого регулятора особенно эффективно в многосвязных системах автоматического регулирования.
При скачкообразных возмущениях на регулятор, существенный спектр которых является низкочастотным, предлагаемый регулятор имеет преимущества перед.известным.
ал котораго, безусловно, очень высок в связи с широким распространением систем автоматического регулирования

| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР С ПЕРЕКЛЮЧАЕМЫМИ ПАРАМЕТРАМИ | 1969 |
|
SU235135A1 |
| Автоматический корректор частоты для дизель-генераторных электростанций | 1983 |
|
SU1176437A1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1964 |
|
SU164633A1 |
| Система регулирования диаметра жил на бумагомассной машине | 1986 |
|
SU1472879A1 |
| Регулируемый электропривод | 1976 |
|
SU656172A2 |
| Релейный регулятор | 1976 |
|
SU651306A1 |
| Устройство для автоматической раз-гРузКи гидРОКлАССифиКАциОННыХ АппА-PATOB | 1979 |
|
SU812346A1 |
| Управляющее устройство стабилизированного пъезополупроводникового источника питания | 1984 |
|
SU1241373A1 |
| Регулируемый электропривод | 1976 |
|
SU611281A2 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |


Изобретение относится к области теплоэнергетики и может быть применено при регулировании подачи топлива в многотопочные котельные агрегаты; Целью изобретения является улучшение динамических характеристик регулятора. Поставленная цель достигается за счет того, что сигнал яадачия сравнивается с сигналом обратной связи и поступает на вход усилителя, в ка- честве которого применяется трехпози- ционный релейный блок, охваченный инерционной обратной связью. Инерционная обратная связь реализована с помощью RS-цепи, цепи заряда и разряда конденсатора, которые коммутируются контактами выходных реле трех- позиционного релейного блока, причем цепь разряда коммутируется замыкающими контактами с регулируемым временем срабатывания на замыкание. 6 ил. Ф
На фиг оба показаны переходные про
цессы в замкнутой системе регулирования с данным регуляторомJ а на фиг,66 - с известным регулятором.
Для о&ьектов 27 регулирования с большим чистым (транспортным) запаздыванием можно так подобрать t С, и- Сд регулятора, чтобы при скачкообразном изменении задания регулятор сра.ботал один раз и кривые разго на Y и X объекта 27 регулирования и устройства. 7 обратной связи изменялись одинаково. В этом случае сигнал б на входе релейного усилителя 25 . близок к нулю, и регулятор отработает это скачкообразное возмущение за одно включение.
Известный регулятор при таком объекте 27 регулирования принципиально не сможет отработать скачкообразное возмущение на входе регулятора за одно включение. Даже если он за первое включение точно отработает это возмущение, то запаздывание реакции у объекта 27 регулирования и не- ,медленное изменение сигнала обратной |связи X неизбежно приведут к повтор- ным включениям регулятора в ту же |сторону, вследствие него произойдет перерегулирование по Y, и регулятор будет вынужден потом отработать наза эти повторные включения (фиг.бб), что нереапьнос
При любых других настройках также невозможно добиться отработки скачкообразного возмущения за одно включение без лишних нерациональных движений регулятора.
Таким образом, предлагаемый регулятор лучше подавляет спектр возмущений в области резонансных и околорезонансных частот ( СЭ, -iCJioj ), имеет более широкий диапазон частот эффективной работы регулятора (О-со вместо О - «4 ) , максиму а АЧХ сдвигается в более высокочастотную область где мощность реальных возмущений зна чительно слабее, более рационально отрабатывает скачкообразные возмущения.
Такое улучшение динамических характеристик регулятора улучшает каче ство работы промышленных систем автоматического регулирования и дает экономический эффект, суммарный потенци.
fO
15
20
2535
50
30
40
45
55
Реализация предлагаемого регулятора не требует существенных затрат и легко может быть осуществлена дополнительной установкой в промьгашенных регуляторах промежуточного реле, имеющего замыкающий контакт с регулируемым замедлителем.
Затраты могут быть существенно сокращены при серийном изготовлении предлагаемых регуляторов.
Формула изобретения
Регулятор, содержащий последова- тельно соединенные устройство сравнения и усилитель, выходом подключенный к первым вьгеодам обмоток управления первого и второго фазочувствительных реле, вторыми вьшодами соединенных соответственно с катодом первого разделительного диода и анодом второго разделительного диода, анод и катод которых подключены к первой обкладке накопительного конденсатора, второй обкладкой соединенного с одним из входов устройства сравнения и с первым выводом резистора заряда, источник напряжения питания, положительная шина которого подключена к первым выводам замыкающих контактов первого и второго фазочувствительных реле, а отрицательная - к первым выводам первой и второй сигнальных ламп и первой выходной клемме регулятора, второй вывод первой сигнальной лампы соединен с второй выходной клеммой регулятора, с вторым вьгеодом замыкающих контактов первого фазочувствительного реле и первым выводом потенциометра, вторым выводом подключенного к второму выводу замыкающих контактов втрро- го фазочувствительного реле,к третьей выходной клемме регулятора, к первому выводу резистора разряда и второй обкладке конденсатора, о т, л и ч а - ю щ и и с я тем, что, с целью улучшения динамических характеристик регулятора, в нем дополнительно установлено промежуточное реле, первый вывод обмотки управления которого соединен с положительной шиной источника напряжения питания, а второй - через последовательно включенные размыкающие контакты первого и второго
фазочувствительных реле с отрицательной шиной источника напряжения питания, первый и второй выводы размыкающих контактов промежуточных реле подключены соответственно к второму выводу резистора заряда и подвижному
контакту потенциометра, первый и вто- рой выводы замыкающих с задержкой на , замыкание контактов промежуточного реле соединены соответственно с пер-. вым выводом резистора заряда и вторым выводом резистора разряда.
Л
.
Й гьрр:
II li li
i i irSk-u
J
4 q:3i:: ji5
iNl I I r-ii II
iXJLUL
I
jOplO-JL
0.02 Qm
JLHiilUkl
II I Jj
jrjL
0,W й/ О.Щ 0.16
Фив. 5
Физ.6
| Штейнберг Ш.Е | |||
| и др | |||
| Промьштен- ные автоматические регуляторы | |||
| - М | |||
| Энергия, 1973, с.83, рис.3-1,б, с.103, рис.3-11,а | |||
| Там же, с.103, рис.3-11,6. |
