V Л-,
(У)
iftusl
НИИ друг относительно друга. Для запирания в произвольном положении выдвижения звеньев предусмотрено запирающее и отпирающее устройства. Это запирание осуществляется с помощью управления присоединенным на самом нижнем телескопическом звене 5 канатом 11, воздействующим
на переставляемый в виде полиспаста управляющий канат 6, производящий запирание, соответственно отпирание. Причем управляющий канат обходит в виде полиспаста ролики 8 и 17 и блоки 10 и 18 и за счет изменения расстояния между ними укорачивается или удлиняется. 4 з.п. ф-лы,3 ил.
Изобретение относится к подъемно-транспортному машиностроению, в частности к грузовому наклонному подъемнику с несколькими телескопи- ческими звеньями, на к оторых устанавливается грузовой контейнер. Цель изобретения - снижение расхода энергии и повьшение точности срабатывания . При выдвижении наклонного подъемника все телескопические звенья 1-5 одновременно находятся в движе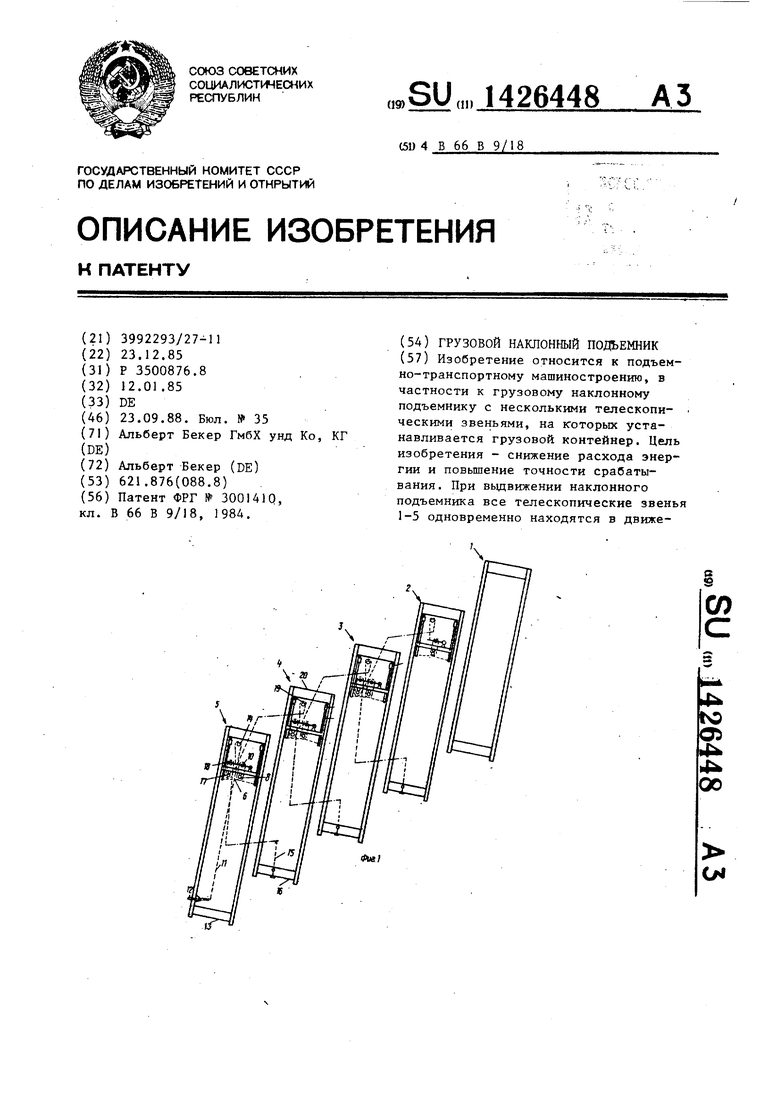
Изобретение относится к подъемно- транспортному машиностроению, в частности к грузовому подъемнику.
Цель изобретения - снижение расхода энергии и повьщгение точности ера- батьшания.
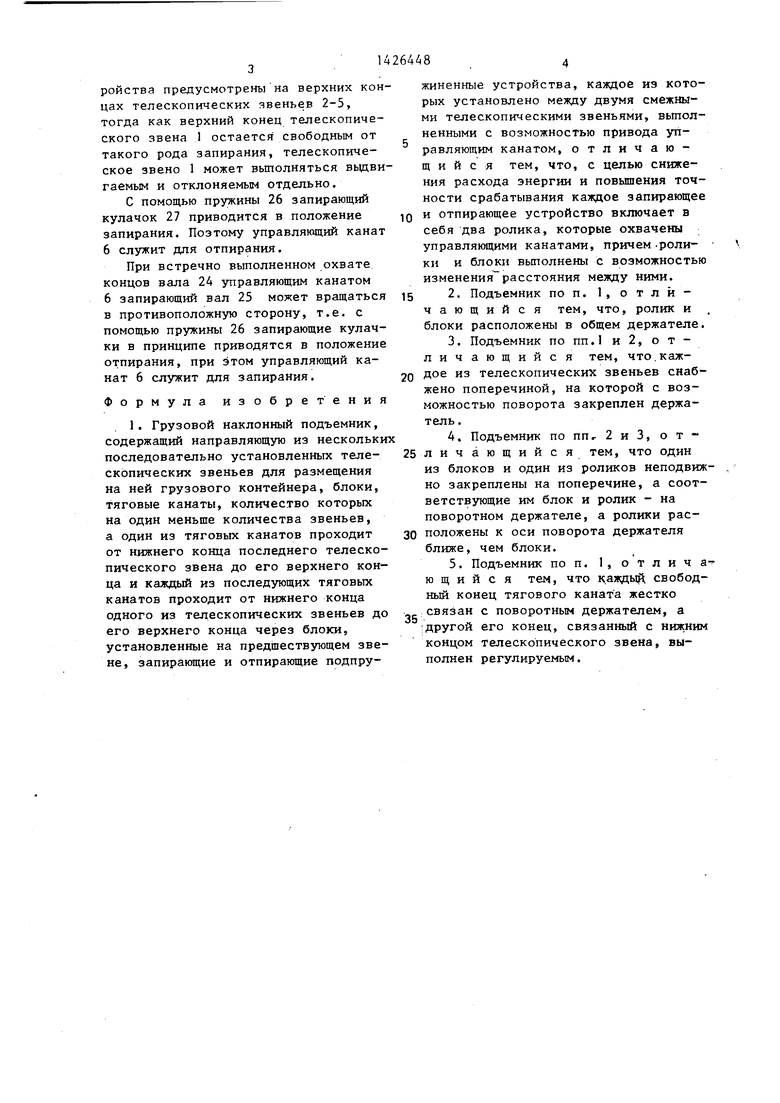
На фиг. 1 схематично изображены пять телескопических звеньев грузового наклонного подъемника, вид сверху; на фиг. 2 - верхний конец послед него телескопического звена 5 и ниж- .ний конец предпоследнего телескопического звена 4; на фиг. 3 - разрез А-А на фиг. 2.
Наклонный подъемник состоит из телескЬпических звеньев 1-5. Звенья 3-5 имеют запирающее и отпирающее устройства, включающие в себя охваченные управляющим канатом 6 установленный на поперечине 7 ролик 8 и размещенный в поворотном держателе 9 ролик 10. Один конец тягового каната соединен с ручным рычагом 12, расположенным у нижнего конца 13 звена 5, а другой конец каната 10, огибая отводной ролик 14, непосредственно закреплен на поворотном держателе 9. Один конец второго тягового каната 15 закреплен на нижнем конце 16 звена 4, его средняя часть охватывает блоки 17 и 18, первый из которых смонтирован на поперечине 7, а второй-в держателе 9, канат 15 охватывает отводной ролик. 19; закрепленный на конце 20 секции 4, и конец каната соединен -с поперечиной 7 и т. д.
Держатель 9 установлен с возможностью поворота относительно оси 21 и через консоль 22 закреплен на поперечине 7 телескопического звена 5
5
0
0
5
0
5
0
На поперечине 7 расположены две консоли 23, служащие для перемещения ролика 8 и блока 17. Каждый из свободных концов управляющего каната 6 охватывает вал 24, соединенный с запирающим валом 25, на конце которого установлен подпружиненный пружиной 26 запирающий кулачок 27, выполненный с возможностью взаимодействия с цапфой 28, установленный на конце 13 звена 5. Тяговые канаты вьтолне- ны регулируемыми по длине.
Устройство работает следующим образом.
При управлении ручным рычагом 12 на тяговый канат 6 воздействует тяговое усилие, которое побуждает держатель 9 к повороту вокруг оси 21 поворота. При этом ролик 10 и блок 18 удаляются от ролика 8 и блока 17, т.е. расстояния айв увеличиваются. Результатам этого является укорочение управляющего каната 6, так что вал 25 вращается в направлении отпирания и кулачок 27 оказыватся в положении отпирания и приходит к приI леганию к цапфе 28. Одновременно укорачивается тяговьй канат 15, так что на приданный следукнцему телескопическому звену 4 держатель воздействует -Соответствующее тяговое усилие, и так далее (фиг. 1). В связи с тем,
ЧТО бл9к 18 более удален от оси 21 поворота, чем ролик 10, происходит более сильное укорочение тягового i каната 15, благодаря чему учитьгеа- ется pro большая длина (по сравнению с управляющим канатом 6) и тем самым увеличенная упругость каната. , На фиг. 1 показано, что соответствующие запирающие и отпирающие устройства предусмотрены на верхних концах телескопических звеньев 2-5, тогда как верхний конец телескопического звена 1 остается свободным от такого рода запирания, телескопическое звено 1 может вьшолняться вьщви гаемьк и отклоняемым отдельно.
С помощью пружины 26 запирающий кулачок 27 приводится в положение запирания. Поэтому управляющий канат 6 служит для отпирания.
При встречно выполненном охвате концов вала 24 управляющим канатом 6 запирающий вал 25 может вращаться в противоположную сторону, т.е. с помощью пружины 26 запирающие кулачки в принципе приводятся в положение отпирания, при этом управляющий канат 6 служит для запирания.
Формула изобретения
5
жиненные устройства, каждое из которых установлено меткду двумя смежными телескопическими звеньями, вьтол- ненными с возможностью привода управляющим канатом, отличающийся тем, что, с целью снижения расхода знергии и повышения точности срабатывания каждое запирающее и отпирающее устройство включает в себя два ролика, которые охвачены управляющими канатами, причем .роли- ки и блоки вьтолнены с возможностью изменения расстояния между ними.
из блоков и один из роликов неподвижно закреплены на поперечине, а соответствующие им блок и ролик - на поворотном держателе, а ролики расположены к оси поворота держателя ближе, чем блоки.
0
0
5
/5
j.5
| Патент ФРГ № 3001410, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
