
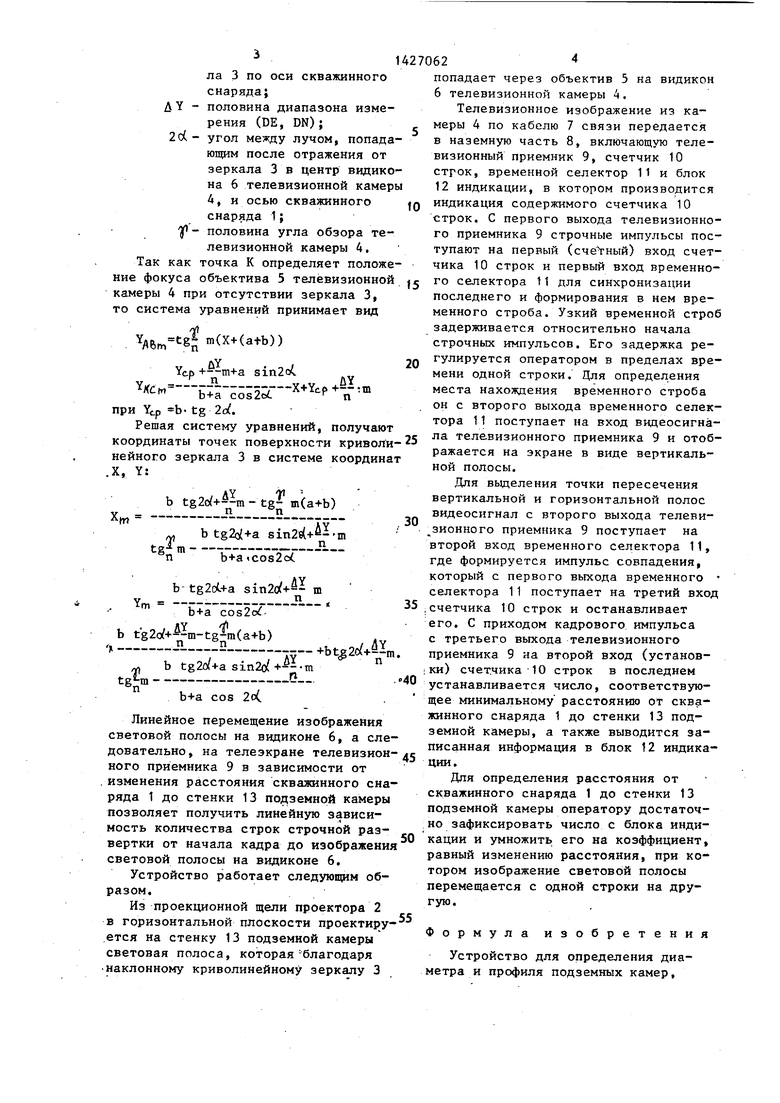
Изобретение относится к горной промгти. Цель изобретения - упрощение обработки информации за счет получе.ний линейной зависимости смещения изображения. Устр-во содержит снаряд 1, предназначенный для спуска в скважину, имеющий .проектор 2 с проекционным отверстием в виде щели, телевизионную камеру 4. Перед последней расположено наклонное зеркало 3, выполненное криволинейным, кривизна которого определяется системой математических уравнений. С камерой 4 связан телевизионный приемник (ТП) 9, с выходом которого соединен счетчик 10 строк. С выходом ТП 9 связан временный селектор 11,соединенный со счетчиком 10. Для вьщеления точки пересечения вертикальной и горизонтальной полос видеосигнал ТП 9 поступает на . селектор 11, с которого проходит на счетчик и останавливает его. С приходом кадрового импульса с выхода ТП 9 на вход счетчика 10 в последнем устанавливается число, соответствующее минимальному расстоянию от скважинно- :го снаряда до стенки подземной камеры. 3 ил. i (Л
Фаг./
Изобретение относится к горной промьппленности, может быть применено при работах, связанных с изучением и измерением подземных структур, и касается устройств для определения диаметра и профиля подземных камера
Цель изобретения - упрощение обра- бЬтки информации за счет получения
15
20
25
л гнейной зависимости смещения изобра-|д мальное расстояние до стенки подзем- жения.
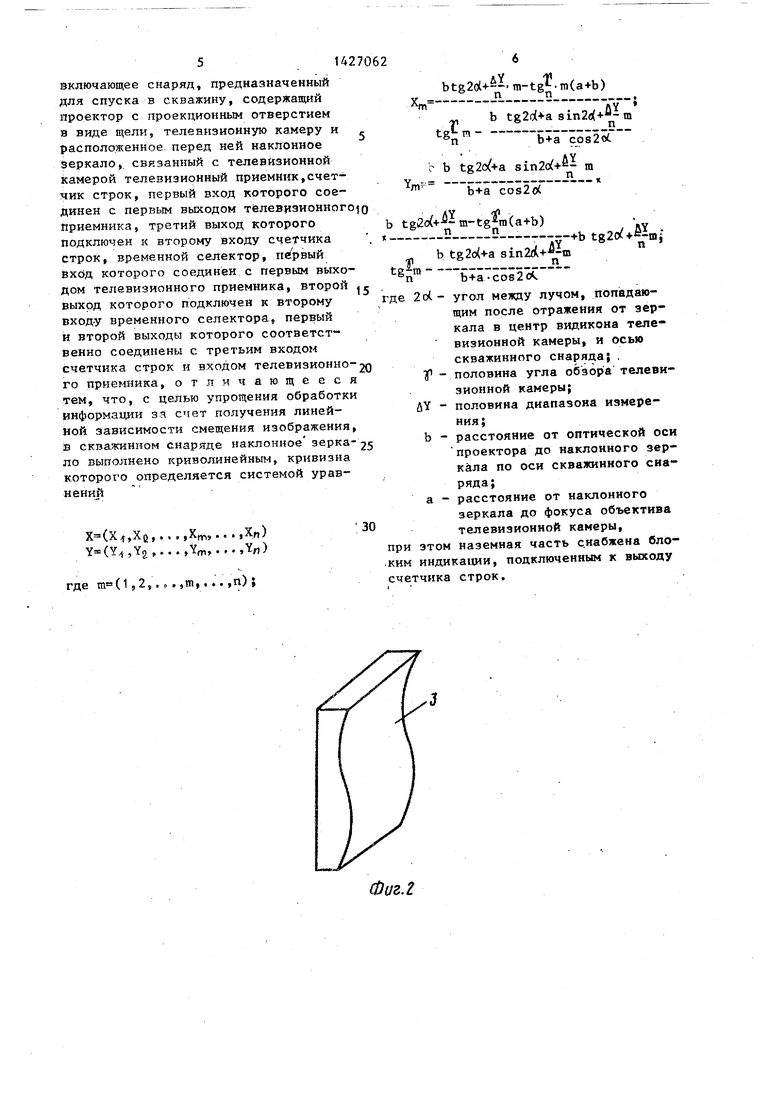
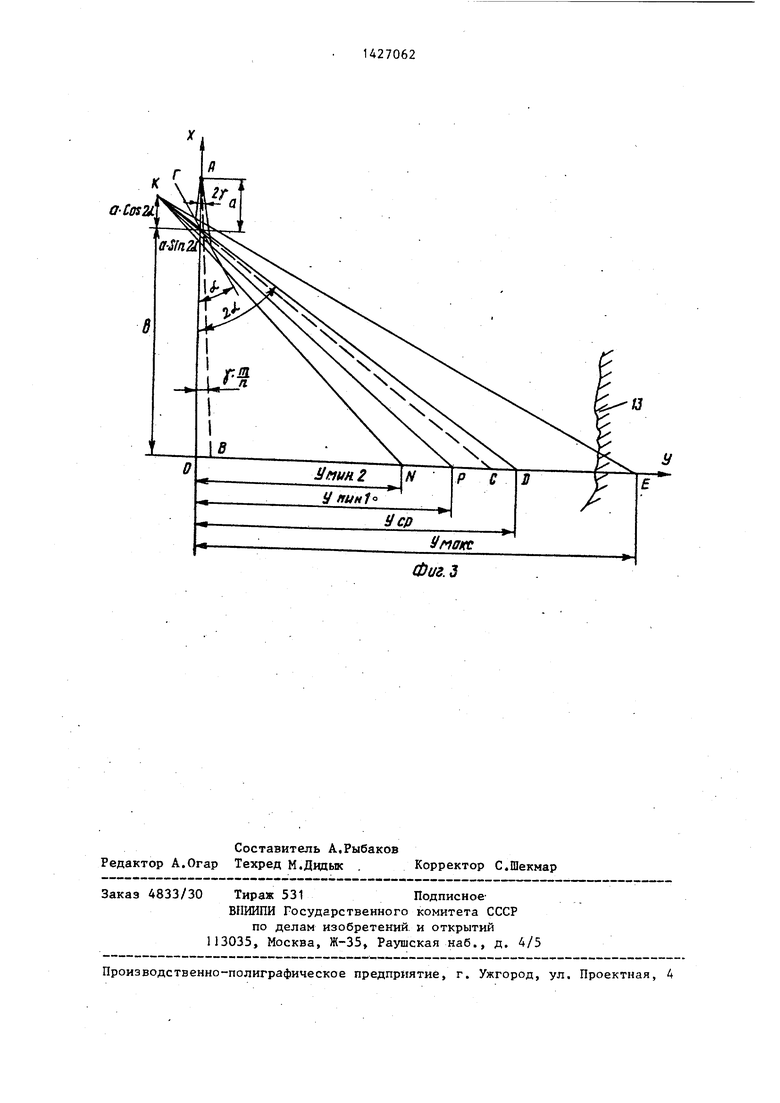
На фиг,1 представлена структурная схема предлагаемого устройства; на фиг, 2 - зеркало, изометр,ия; на фиг.З оптическая схема измерения.
Устройство состоит из снаряда; 1, предназначенного для спуска в скваяси- ну, с расположенными вдоль его про- дЬльной оси проектором 2, наклонным зфркалом 3, телевизионной камерой 4, содержащей объектив 5 и видикон 6, кабеля.7 связи и наземной части 8, включающей телевизионный приемник 9, счетчик 10 строк, временной селектор И и блок 12 индикации, Скважинный 1, расположенный в подземной камере со стенками 13, содержит проектор . 2 с проекционным отверстием в виде щели (н показано) и телевизионную камеру 4, перед которой расположено наклонное з.еркало 3, вьшолненное криволинейным. Телевизионный приемник 9 соединен с телевизионной камерой 4 кабелем 7, Первый вход счетчика 10 строк соединен с первым выходом телевизионного приемника 9, третий выход 35 которого подключен к второму входу счетчика 10 строк. Первый вход вре- менно.го селектора 11 соединен с первым выходом телевизионного приемника 9, второй выход которого подключен к второму входу временного селектора 11, первый и второй выходы которого соответственно соединены с третьим входом счетчика 10 строк и входом те30
ной камеры, при этом изображение точки N при выбранном положении криволинейного зеркала 3 находится внизу мишени видикона б.
Точка К определяет нахождение
-фокуса объектива 5 при обзоре от /чсглсДО Ywnrtf без зеркала. 2f- угол обзора объектива 5 телевизионной камеры 4; о(- угол наклона плоскости Г относительно оси X, т.е половина угла между лучом, попадающим после
,отражения от зеркала 3 в центр видикона 6 телевизионной камеры 4, и осью скважинного снаряда 1; b - расстря-. ние от оси проектора 2 до точки
пересечения оси X и плоскости Г,
1
Криволинейность поверхности зеркала 3 относительно поверхности Г
,выбирается из условий, при которых изменение измеряемого расстояния на
-- (CD) от Ysp в обе стороны, где
п - количество равных частей, вызьша- ет одинаковое перемещение изображения световой .полосы на вндиконе 6 и, следовательно, на телеэкране телевизионного приемника 9, а минимальное расстояние становится равным Y;4UM5(ON), так как -Yep Ycfl ,
40
45
Кривизна криволинейного зеркала 3 определяется системой точек, каждая из которых определяется пересечением линий АВ и линий КСи, где зл - номер части (1,2,3,,. , jin,,,, .п), а следовательно s решением
левизионного приемника 9. I .
Кривизна зеркала 3 определяется
системой уравнений, полученной при рассмотрении оптической схемы измерения.
На фиг.З показана оптическая ось Y проектора 2 и ось X, которая является осью скважинного снаряда 1. Точ кой А обозначен фокус объектива 5. Отрезок Ytp (OD) обозначает среднее значение до стенки подземной камеры, при этом изображение точки D при выб ранном положении зеркала 3 находится в центре мишени видикона 6 ,
Отрезки (t)E) и д,инг(ОР) обо-, значают максимальное-и минимальное расстояния до стенки подземной каме- |ры, при этом изображение точек Е и Р, если в плоскость Г помещают плоское зеркало, находится соответственно вверху и внизу мишени видикона б.
Отрезок Y iYunfj(ON) обозначает мини5
0
5
д мальное расстояние до стенки подзем-
5
0
ной камеры, при этом изображение точки N при выбранном положении криволинейного зеркала 3 находится внизу мишени видикона б.
Точка К определяет нахождение
-фокуса объектива 5 при обзоре от /чсглсДО Ywnrtf без зеркала. 2f- угол обзора объектива 5 телевизионной камеры 4; о(- угол наклона плоскости Г относительно оси X, т.е половина угла между лучом, попадающим после
,отражения от зеркала 3 в центр видикона 6 телевизионной камеры 4, и осью скважинного снаряда 1; b - расстря-. ние от оси проектора 2 до точки
пересечения оси X и плоскости Г,
1
Криволинейность поверхности зеркала 3 относительно поверхности Г
,выбирается из условий, при которых изменение измеряемого расстояния на
-- (CD) от Ysp в обе стороны, где
п - количество равных частей, вызьша- ет одинаковое перемещение изображения световой .полосы на вндиконе 6 и, следовательно, на телеэкране телевизионного приемника 9, а минимальное расстояние становится равным Y;4UM5(ON), так как -Yep Ycfl ,
35
40
45
Кривизна криволинейного зеркала 3 определяется системой точек, каждая из которых определяется пересечением линий АВ и линий КСи, где зл - номер части (1,2,3,,. , jin,,,, .п), а следовательно s решением
0
ш.(Х-(ач-Ь))
v -/-ХнУЁ-ч -ГУ -/XilXfi Y 1
Yf Cm xr-Xi -
5
где Д.
гДг
а
b координаты точки К; координаты точки Cj расстояние от наклонного зеркала 3 до фокуса объектива 5 телевизионной камеры 4;
расстояние от оптической оси проектора 2 до зеркала 3 по оси скважинного снаряда;
Д - половина диапазона измерения (DE, DN);
2с(- угол между лучом, попадающим после отражения от зеркала 3 в центр видико- на 6 телевизионной камеры А, и осью скважинного л снаряда 1;
jP - половина угла обзора телевизионной камеры 4. Так как точка К определяет положефокуса объектива 5 телевизионной е еры 4 при отсутствии зеркала 3, система уравнений принимает вид
Y;,())
.p+-y-m4-a sinZoC
г п
X+Ycp+--:m
Ж п
Ъ+а cos2cL при Ytp b- tg 2of.
Решая систему уравнений, получают координаты точек поверхности криволи- нейного зеркала 3 в системе координат .X, Y:
m
b tg2o(+--m - tg- m(a+b) b tg2o(+a sin2B(
r mn
b+a (Cos2c5C b-tg2c4.-fa sin2oi -i--J m
V E:.,
b+a cos2c b tg2o/+- -m-tg-m(a+b)
JLn ..
b tg2o(+a sin2d+---m Ъ+а. cos 2c(
.dY
tg
Линейное перемещение изображения световой полосы на видиконе 6, а следовательно, на телезкране телевизионного приемника 9 в зависимости от изменения расстояния скважинного снаряда 1 до стенки 13 подземной камеры позволяет получить линейную зависимость количества строк строчной развертки от начала кадра до изображения световой полосы на видиконе 6.
Устройство работает следующим образом.
Из проекционной щели проектора 2 в горизонтальной плоскости проектируется на стенку 13 подземной камеры световая полоса, которая благодаря наклонному криволинейному зеркалу 3
л
е
20
- 25 т
30
.
35
40
50
попадает через объектив 5 на видикон 6 телевизионной камеры 4.
Телевизионное изображение из камеры 4 по кабелю 7 связи передаете в наземную часть 8, включающую телевизионный приемник 9, счетчик 10 строк, временной селектор 11 и блок 12 индикации, в котором производится индикация содержимого счетчика 10 строк. С первого выхода телевизионного приемника 9 строчные импульсы поступают на первый () вход счетчика 10 строк и первый вход временного селектора 11 для синхронизации последнего и формирования в нем временного строба. Узкий временной строб задерживается относительно начала строчных импульсов. Его задержка регулируется оператором в пределах времени одной строки. Для определения места нахождения временного строба он с второго выхода временного селектора 11 поступает на вход видеосигнала телевизионного приемника 9 и отображается на экране в виде вертикальной полосы.
Для выделения точки пересечения вертикальной и горизонтальной полос видеосигнал с второго выхода телеви зионного приемника 9 поступает на второй вход временного селектора 11, где формируется импульс совпадения, который с первого выхода временного селектора 11 поступает на третий вход
.счетчика 10 строк и останавливает его. С приходом кадрового импульса с третьего выхода телевизионного приемника 9 на второй вход (установiки) счетчика 10 строк в последнем устанавливается число, соответствующее минимальному расстоянию от скважинного снаряда 1 до стенки 13 подземной камеры, а также выводится записанная информация в блок 12 индикации.
Для определения расстояния от скважинного снаряда 1 до стенки 13 подземной камеры оператору достаточно зафиксировать число с блока индикации и умножить его на коэффициент, равный изменению расстояния, при котором изображение световой полосы перемещается с одной строки на другую.
Формула изобретения
Устройство для определения диаметра и профиля подземных камер,
5142
аключающее снаряд, предназначенный для спуска в скважину, содержащий Проектор с проекционным отверстием в виде щели, телевизионную камеру и расположенное, перед ней наклонное зеркало, связанный с телевизионной камерой телевизионный приемник,счетчик строк, первый вход которого соединен с первым выходом т аЛевизионного Приемника, третий выход которого подключен к второму входу счетчика строк, временной селектор, первый вхс}д которого соединен с первым выходом телевизионного приемника, второй выход которого подключен к второму входу временного селектора, первый и второй выходы которого соответст венно соединены с третьим входом счетчика строк и входом телевизионного приемника, отличающееся тем, что, с целью упрощения обработки Информации за спет получения линейной зависимости смещения изображения, в скважиниом снаряде наклонное зеркало выполнено криволинейным, кривизна которого определяется системой уравнений
x(x,Xe,,
Y«(Y,Y2,,
Я
Ym, i-f) /
где
,2,. . . ,vn,... ,n) ;
V
Ym--
btg2(X-t--- m-tg.in(a+b)
у b tg2ol- -a 8in2e( m tg ra b+a cos25r
b tg2o(+a sin2o( m b+a cos2o(
n
ц г2о 25
30
b tgгo(-m-tg m().,
,.Sn.j.,
b tg2o(+a 8in2ril- - im « «
tg-rabTiTco82oC
где 2o(- угол между лучом, попадающим после отражения от зеркала в центр видикона телевизионной камеры, и осью скважинного снаряда; . - половина угла обзора телевизионной камеры;
UY - половина диапазона измерения;
b - расстояние от оптической оси проектора до наклонного зер- кйла по оси скважинного снаряда;а - расстояние от наклонного
зеркала до фокуса объектива телевизионной камеры, при этом наземная часть снабжена бло- ким индикации, подключенным к выходу счетчика строк.
Фиг. 2
(J-Cos2JL
Фиг.З
| Авторское свидетельство СССР 1241757, йл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
