Изобретение относится к способам и устройствам сигнализации о краже, нарушении пломбировки дверей, люков и т.п. на железнодорожном транспорте при движении поезда с использованием телевизионных камер.
Известен способ контроля сохранности грузов, заключающийся во внешнем осмотре подвижного состава и фиксации сохранности пломб [1].
Недостаток способа заключается в его малой производительности.
Широко известно использование телевизионных камер для наблюдения за охраняемыми объектами, в частности, на железнодорожном транспорте [2]. Телевизионные камеры используются для наблюдения за железнодорожными составами при их формировании в парках и на распускных горках.
Однако известные телевизионные установки не позволяют распознать факт несанкционированного доступа, нарушение пломб, взлома дверей, крыши вагона и т.п.
Известны промышленные телевизионные установки (ПТУ), серийно выпускаемые промышленностью и предназначенные для наблюдения [3]. Выбор их параметров диктуется их целевым назначением, при этом варьируются их основные характеристики - число строк разложения, число воспроизводимых градаций яркости.
Недостаток описанных установок заключается в том, что они требуют непрерывного участия оператора в процессе наблюдения за объектом.
Известно устройство для видеоконтроля контактных рельсов на железной дороге [4], содержащее видеокамеру, установленную под рамой вагона, с галогенной осветительной лампой. Разрешающая способность видеокамеры 430 тысяч пиксел на кадр. Видеозапись хранится в памяти ЭВМ и служит образцом для последующих сравнительных исследований. Недостаток устройства заключается в его узкой специализации.
Известен видеодетектор движения [5], обеспечивающий фиксацию вторжений в широком диапазоне скоростей и величин перемещений объектов вторжения, причем диапазон фиксируемых перемещений не зависит от изменения освещенности в зоне контроля. В известном видеодетекторе за один период между обновлением записи, выбираемом из расчета не допустить ложных срабатываний, например, за счет смещения солнечных теней, осуществляется несколько сотен циклов сравнения, что позволяет перекрыть диапазон перемещений от высокоскоростных до самых медленных.
Недостаток устройства заключается в том, что оно обеспечивает сравнение только смежных кадров, снятых одной и той же телевизионной камерой.
Известны устройства автоматического распознавания телевизионных изображений [6] . В частности, известен комплекс "Кадр", предназначенный для автоматической диагностики и классификации цитологических препаратов на нормальные и патологические.
В состав комплекса входит телевизионный микроскоп, состоящий из светового биологического микроскопа с возможностью вывода изображения на телевизионный датчик, и прикладной телевизионной установки. Микроскоп снабжен автоматически перемещаемым в двух взаимно перпендикулярных направлениях, предметным столиком. В качестве датчика используется видиконная камера серийной ПТУ-29. С выхода датчика видеосигнал поступает на устройство обработки, в котором осуществляется амплитудно-временная селекция видеосигнала, измерение информативных параметров и преобразование результатов измерений в цифровую форму. Полученные данные поступают в специализированное вычислительное устройство, в котором происходит накопление и обработка поступающей информации по заранее определенным алгоритмам классификации. Устройство поиска клеток производит автоматический поиск и выделение отдельных клеток препарата, а также смещение предметного столика микроскопа после окончания цикла измерения параметров каждой клетки. Логическое устройство определяет последовательность поиска и измерения параметров клеток. Видеоконтрольное устройство служит для визуального контроля в процессе настройки и работы комплекса. Результаты анализа параметров клеток и классификации препарата фиксируются на выходном устройстве (цифровое табло, цифропечатающее устройство и т.п.).
Измерительная часть комплекса "Кадр" представляет собой самостоятельный телевизионный анализатор структуры изображений.
Недостаток устройств заключается в том, что оно анализирует неподвижное изображение объекта на предметном столике, к тому же параметры ПТУ не соответствуют поставленной задаче анализа изображения движущегося поезда.
Однако по своей технической сущности данное решение может служить прототипом предлагаемому. Задачей предлагаемых способа и устройства является обеспечение возможности оперативного обнаружения факта несанкционированного доступа в движущемся железнодорожном составе.
Решение поставленной задачи обеспечивается внешним осмотром подвижного состава, включая проверку целостности пломбировки люков и дверей вагонов, в парке прибытия подвижной состав перемещают в поле зрения неподвижных телекамер общего и детального обзора, указанный осмотр производят навстречу направлению движения подвижного состава, причем с указанной телекамеры детального обзора производят непрерывную запись изображения, с помощью указанной телекамеры общего обзора обнаруживают предполагаемые нарушения целостности груза, распознают отклонения образа наблюдаемого объекта от исходного состояния путем его сравнения с эталонным образом, а по результатам сравнения судят о сохранности груза, эталонный образ наблюдаемого объекта предварительно создают в парке отправления, производя видеозапись подвижного состава в идентичных условиях движения, который затем передают в парк прибытия до прихода наблюдаемого объекта, распознавание отклонения образа наблюдаемого объекта от эталонного производят визуально) распознавание отклонения образа наблюдаемого объекта от эталонного производят автоматически.
Система дистанционного контроля сохранности грузов в движущемся железнодорожном составе, содержащая средства контроля прибывающего в парк прибытия подвижного состава в виде видеоконтрольных устройств с телекамерами общего и детального обзора, установленными над наблюдаемой поверхностью на расстояниях, определяемых соотношениями:
где Ho - расстояние установки телекамеры общего обзора, м;
Vп - допустимая скорость движения подвижного состава, м/с;
tp - время распознавания образа наблюдаемого объекта, с,
Lp - расстояние до передней границы пространства, резко изображаемого объективом, м;
β - угол наклона от вертикали объектива телекамеры общего обзора, градусы;
γo - угол зрения объектива телекамеры общего обзора, градусы;
Hд - расстояние установки телекамеры детального обзора, М;
tк - время одного кадра, c;
γд - угол зрения объектива телекамеры детального обзора, градусы;
F - фокусное расстояние объектива, мм;
Zк число строк телевизионного растра;
d - минимальный размер наблюдаемого объекта, мм;
a - размер приемной площади по кадру телекамеры, мм;
α - доля обратного хода в период кадровой развертки;
Zоб - минимальное число строк телевизионного растра по высоте, позволяющее распознать объект,
выходы телекамер последовательно через коммутатор видеосигналов, снабженный переключателем каналов записи, и через плату цифровой видеозаписи соединены с записывающим устройством, причем выход указанной телекамеры общего обзора дополнительно соединен с индивидуальным видеоконтрольным устройством, а на вход записывающего устройства дополнительно подключен выход счетчика вагонов; парк отправления дополнительно оборудован телекамерами общего и детального обзора, установленными над наблюдаемой поверхностью аналогично указанным телекамерам в парке прибытия, выходы которых поcледовательно через коммутатор видеосигналов, снабженный переключателем каналов записи, и через плату цифровой видеозаписи соединены с записывающим устройством, снабженным видеоконтрольным устройством, причем выход телекамеры общего обзора дополнительно соединен с индивидуальным видеоконтрольным устройством, а на вход записывающего устройства дополнительно подключен выход счетчика вагонов, при этом выход записывающего устройства парка отправления соединен по линии связи с первым входом идентифицирующего блока, расположенного в парке прибытия, а выход записывающего устройства парка прибытия непосредственно соединен со вторым входом идентифицирующего блока, содержащего поcледовательно соединенные синхронизатор квадратор и видеоконтрольное устройство; идентифицирующий блок дополнительно снабжен логическим устройством автоматического покадрового распознавания, входы которого соединены с выходами квадратора, а выход - со входом видеоконтрольного устройства идентифицирующего блока.
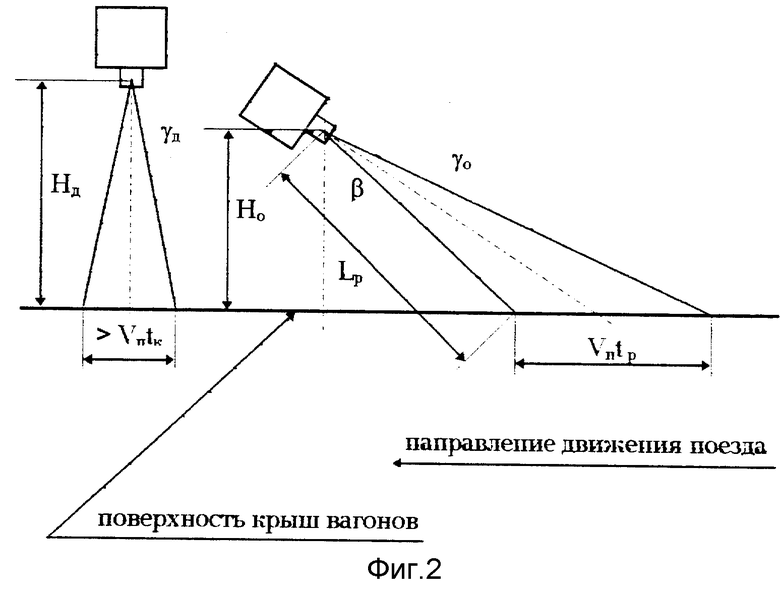
На фиг.1 представлена структурная схема системы. На фиг.2 показана схема установки телекамер по отношению к наблюдаемой поверхности. Система, установленная в парке отправления, содержит
1 (ТК-1) общего обзора и
2 (ТК-2) детального обзора. ТК-1 соединена с видеоконтрольным устройством 3 (ВКУ-1).
ТК-1 и ТК-2 через входы I и II соответственно соединены с коммутатором видеосигналов 4 (К-1), снабженным переключателем 5 на входе III. Выход IV коммутатора 4 через плату цифровой видеозаписи 6 (ПЦВЗ-1) соединен с записывающим устройством 7, выполненным, например, на базе персонального компьютера (ПК-1), снабженным монитором 8 (ВКУ-2). На вход компьютера ПК-1 подключен счетчик вагонов 9 (СЧ-1).
Система, установленная в парке прибытия, содержит телевизионную камеру 10 (ТК-3) общего обзора и телевизионную камеру 11 (ТК-4) детального обзора. ТК-3 соединена с видеоконтрольным устройством 12 (ВКУ-3).
ТК-3 и ТК-4 через входы V и VI соответственно соединены с коммутатором видеосигналов 13 (К-2), снабженных переключателем 14 на входе VII. Выход VIII коммутатора 13 через плату цифровой видеозаписи 15 (ПЦВЗ-2) соединен с записывающим устройством 16, выполненным, например, также на базе персонального компьютера (ПК-2). На вход компьютера ПК-2 подключен счетчик вагонов 17 (СЧ-2). Выход записывающего устройства 16 соединен с входом IX идентифицирующего блока 18, содержащего последовательно включенные синхронизатор 19, квадратор 20, логическое устройство 21 и видеоконтрольное устройство 22 (ВКУ-4). Вход X идентифицирующего блока 18 соединен посредством линии связи с выходом XI записывающего устройства 7, расположенного в парке отправления.
Устройство работает следующим образом.
Режим ручного управления процессом контроля.
При заходе поезда в парк прибытия телекамера общего обзора 10 формирует видеосигнал перспективного изображения поезда, в частности, крыш движущихся вагонов. Указанный видеосигнал поступает на видеоконтрольное устройство 12, оператор наблюдает полученное изображение и зрительно фиксирует открытые и взломанные крыши и люки. Телекамера детального обзора 11, имеющая узкое поле зрения и предназначенная для визуализации малоразмерных объектов (пломб и т. п. ) формирует видеосигнал быстроперемещающихся в ее поле зрения объектов поиска, которые не могут быть непосредственно обнаружены оператором визуально. Видеосигнал телекамеры 11 через вход VI и выход VIII коммутатора видеосигналов 13 подается на плату цифровой видеозаписи 15, где преобразуется в цифровой код и последовательность видеокадров в цифровой форме записывается на жесткий диск компьютера записывающего устройства 16. При обнаружении нарушений сохранности груза на экране видеоконтрольного устройства 12 оператор при помощи переключателя 14 подключает телекамеру общего обзора 10 через вход V и выход VIII коммутатора видеосигналов 13, и через плату цифровой видеозаписи 15 записывает кадр с изображением повреждений в память записывающего устройства 16 компьютера ПК-2.
После завершения прохода поезда в парк прибытия оператор производит анализ записанной информации при помощи записывающего устройства 16 с монитора 22 (ВКУ-4).
Режим полуавтоматического управления процессом контроля.
При отправлении поезда со станции отправления телекамера общего обзора ТК-1, расположенная по отношению к проходящему составу идентично телекамере общего обзора ТК-3 в парке прибытия, формирует видеосигнал, соответствующий изображению отправляющегося состава. Этот видеосигнал через вход I и выход IV коммутатора видеосигналов 4 и через плату цифровой видеозаписи 6 записывается на жесткий диск компьютера записывающего устройства 7. После прохождения поезда в парке прибытия под телекамерой общего обзора 10, последняя аналогично формирует видеосигнал, соответствующий изображению прибывающего состава. Этот видеосигнал представляет собой последовательность кадров, соответствующую последовательности вагонов (либо цистерн, платформ и т. п.) состава. Такая последовательность записи: "один кадр - один вагон" обеспечивается посредством счетчика вагонов 17 (СЧ-2), по команде с которого через вход V и выход VIII коммутатора видеосигналов 13 и через плату цифровой видеозаписи 15 видеосигнал записывается в память компьютера записывающего устройства 16. Оператор в парке прибытия включает оба компьютера записывающих устройств 7 и 16 в режим воспроизведения, и сигналы из памяти компьютеров поступают на входы IX и X идентифицирующего блока 18, где при помощи синхронизатора 19 обеспечивается синхронизация видеосигналов, и после их прохождения через квадратор 20 на экране ВКУ-4, в его соседних половинах, формируется изображение идентичных фрагментов контролируемого состава при выходе со станции отправления и при заходе в парк прибытия. При этом логическое устройство 21 не задействовано. Сравнивая эти изображения, оператор выявляет различия и делает заключение о нарушении коммерческой сохранности грузов. Кроме телекамеры общего обзора ТК-1, по условиям решения задачи трансляция изображения в память компьютера записывающего устройства 7 может производиться и с телекамеры детального обзора ТК-2, расположенной по отношению к проходящему составу идентично телекамере детального обзору ТК-4 в парке прибытия. Во избежание накопления ошибки в покадровом анализе из-за разности скоростей движения поезда в парках отправления и прибытия видеозапись производят по сигналу счетчиков 9, 17 вагонов. При этом каждая серия кадров начинается после срабатывания счетчика, и предыдущая накопленная ошибка обнуляется.
Режим автоматического управления процессом контроля.
В автоматическом режиме в работу включается логическое устройство 21, в которое из квадратора 20 поступают телевизионные кадры эталонного видеоизображения, полученного в парке отправления, и снятые в идентичных условиях телевизионные кадры, полученные в парке прибытия. При этом кадры эталонного и полученного в парке прибытия видеоизображений нумеруются, с помощью квадратора совмещаются их начала, а затем происходит их логическая обработка по специальному алгоритму. В частности может быть использована программа VideoTest, версия 4,0.
Для большей достоверности и облегчения логического анализа все телевизионные кадры снимаются в идентичных условиях, т.е. скорость поезда в парке отправления и в парке прибытия должна быть примерно одинакова.
Геометрия установки телекамер относительно крыш вагонов должна обеспечивать выполнение ряда специальных требований.
При выборе геометрии установки телекамер общего обзора ТК-1 и ТК-3 следует руководствоваться следующими положениями:
- вагоны должны набегать на телекамеру, при этом оператор обнаруживает на экране в верхней его части изображение пролома крыши или открытые двери и люки. По мере набегания поезда на телекамеру указанное изображение перемещается в нижнюю часть экрана, одновременно увеличиваясь в размере, что позволяет оператору сделать окончательный вывод о наличии нарушения сохранности груза;
- ширина крыши вагона на изображении должна соответствовать ширине нижней границы экрана, что обеспечивает оптимальное наблюдение:
- угол наклона оси телекамеры должен быть таким, чтобы время нахождения рассматриваемой точки вагона в поле зрения оператора составляло не менее 5 с, что обеспечивает надежное решение задачи обнаружения и распознавания.
При выборе геометрии установки телекамер детального обзора ТК-2 и ТК-4 следует руководствоваться следующими положениями:
- телекамера должна располагаться перпендикулярно рассматриваемой поверхности, т.к. в этом случае обеспечивается постоянная резкость изображения рассматриваемой точки в процессе ее движения при ограниченной глубине резкости достаточно длиннофокусного объектива;
- время нахождения объекта наблюдения в поле зрения телекамеры должно быть таким, чтобы исключить "проскакивание" заданной точки, а также обеспечить возможность ее наблюдения не на границе кадра, а в его поле при произвольном моменте наблюдения.
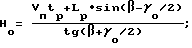
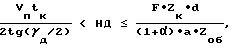
Указанные требования выполняются при следующих условиях:
где Ho - расстояние установки телекамеры общего обзора, м;
Vп - допустимая скорость движения подвижного состава, м/с;
tp - время распознавания образа объекта наблюдения, с;
Lp - расстояние до передней границы пространства, резко изображаемого объективом, м;
β - угол наклона от вертикали объектива телекамеры общего обзора, град;
γo - угол зрения объектива телекамеры общего обзора, град;
Hд - расстояние установки телекамеры детального обзора, м;
tк - время одного кадра, с;
γд - угол зрения объектива телекамеры детального обзора, град;
F - фокусное расстояние объектива, мм;
Zк - число строк телевизионного растра;
d - минимальный размер рассматриваемого объекта, мм;
a - размер приемной площадки по кадру телевизионной камеры, мм;
α - доля обратного хода в период кадровой развертки;
Zоб - минимальное число строк телевизионного растра по высоте, позволяющее распознать объект.
Таким образом, система позволяет работать в трех режимах.
I режим (ручное управление) характеризуется тем, что оператор производит непрерывное наблюдение за прибывающим составом посредством камеры общего обзора и идентифицирует увиденное изображение с образом, созданном в его мозгу, в реальном масштабе времени. В случае обнаружения несоответствия его представления с увиденным, проще говоря, при обнаружении подозрительных мест, оператор с помощью переключателя 13 производит видеозапись увиденного. В остальное время ведется видеозапись изображения с телекамеры детального обзора, что обеспечивает в дальнейшем возможность детального анализа записанного изображения.
II режим (полуавтоматическое управление) характеризуется тем, что сначала создают эталонное видеоизображение состава в парке отправления, заблаговременно передают его в парк прибытия и предъявляют его оператору синхронно с изображением, полученным в парке прибытия на видеоконтрольном устройстве блока идентификации. Оператор, наблюдая оба изображения на экране ВКУ, производит их сравнение и судит о сохранности состава и груза.
III режим (автоматическое управление) характеризуется полной автоматизацией процесса II-го режима, т.е. задачу распознавания отклонения образа наблюдаемого объекта от исходного состояния производит логическое устройство 21, которое в случае обнаружения несоответствия кадров подает сигнал оператору.
Аппаратурная реализация системы осуществляется на известных стандартных комплектующих.
Источники информации
1. Инструкция о порядке пломбировки люков и дверей железнодорожных вагонов, МПС, 1970.
2. Телевидение, вып. 12. М.: Советское радио, 1974.
3. Техника промышленного телевидения. Л.: Лениздат, 1970.
4. "Железные дороги мира", 3/96, с. 64-65.
5. Видеодетектор движения, а.с. N 1774361, 5 G 08 B 13/196, 1990.
6. Автоматизация распознавания телевизионных изображений. М.: Энергия. 1975, с. 134-137.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА КОМПЛЕКСНОГО ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ, СОХРАННОСТИ И ГАБАРИТНОСТИ ГРУЗОВ, ПЕРЕВОЗИМЫХ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2006 |
|
RU2317907C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА КОММЕРЧЕСКИМИ НЕИСПРАВНОСТЯМИ НА ПОДВИЖНОМ СОСТАВЕ | 2003 |
|
RU2252886C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ НЕПРАВИЛЬНОЙ ЗАГРУЗКИ ЦИСТЕРН | 2009 |
|
RU2517414C2 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ КОММЕРЧЕСКОГО БРАКА НЕФТЕНАЛИВНЫХ ЦИСТЕРН ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2340946C2 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МАССЫ НАЛИВНОГО ГРУЗА | 2009 |
|
RU2417395C2 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| СПОСОБ МНОГОКАНАЛЬНОГО ВИДЕОАУДИОНАБЛЮДЕНИЯ И РЕАЛИЗУЮЩАЯ ЕГО СИСТЕМА (ВАРИАНТЫ) | 2003 |
|
RU2250503C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
Предложены способ и система дистанционного контроля сохранности грузов в движущемся железнодорожном составе, которые позволяют оперативно обнаружить факты несанкционированного доступа к грузам. Техническим результатом изобретения является обеспечение получения документированных сведений о краже, взломе, нарушении пломбировки дверей, люков и т.п., а также сообщение о техническом состоянии подвижного состава на входе в парк прибытия. Технический результат достигается тем, что в парке прибытия подвижной состав в движении осматривают телевизионными камерами общего и детального обзора, установленными определенным образом. Производят запись изображения, которое сравнивают с эталонным, созданным предварительно в парке отправления и переданным в парк прибытия. Причем процесс сравнения осуществляют либо визуально, либо автоматически путем покадрового сравнения. 2 с. и 5 з.п.ф-лы, 2 ил.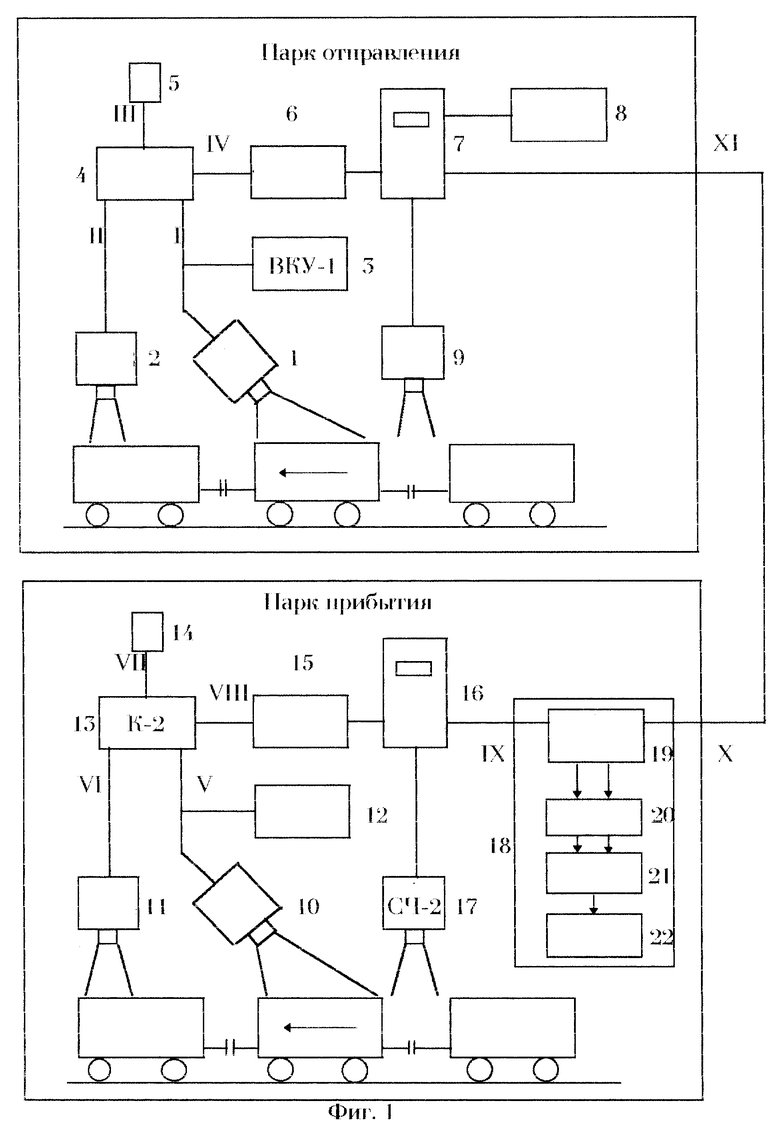
где Н0 - расстояние установки телекамеры общего обзора, м;
Vn - допустимая скорость движения подвижного состава, м/с;
tp - время распознавания образа наблюдаемого объекта, с;
Lp - расстояние до передней границы пространства, резко изображаемого объективом, м;
β - угол наклона от вертикали объектива телекамеры общего обзора, град.;
γo - угол зрения объектива телекамеры общего обзора, град.;
Hд - расстояние установки телекамеры детального обзора, М;
tк - время одного кадра, с;
γд - угол зрения объектива телекамеры детального обзора, град.;
F - фокусное расстояние объектива, мм;
Zк - число строк телевизионного растра;
d - минимальный размер наблюдаемого объекта, мм;
а - размер приемной площадки по кадру телекамеры, мм;
α - доля обратного хода в период кадровой развертки;
Zоб - минимальное число строк телевизионного растра по высоте, позволяющее распознать объект,
выходы телекамер последовательно через коммутатор видеосигналов, снабженный переключателем каналов записи, и через плату цифровой видеозаписи соединены с записывающим устройством, причем выход указанной телекамеры общего обзора дополнительно соединен с индивидуальным видеоконтрольным устройством, а на вход записывающего устройства дополнительно подключен выход счетчика вагонов.
| Инструкция о порядке пломбировки люков и дверей железнодорожных вагонов | |||
| - МПС, 1970 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Захватная платформа для кранов-штабелеров | 1974 |
|
SU554197A1 |
| EP 0445334 A1, 11.09.91 | |||
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1994 |
|
RU2093894C1 |
| Телевидение | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| - М.: Советское радио, 1974 | |||
| Кондратьев А.Г | |||
| и др | |||
| Техника промышленного телевидения | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |

