Изобретение относится к неразру- Шающему контролю изделий ультразвуковым теневым методом и может быть использовано при определении глубины залегания дефектов в изделиях.
Цель изобретения - повышение точности путем слежения за изменением расстояния между излучающими преобразователями и движущимся КОНТРОЛИРУЕМЫМ изделием.
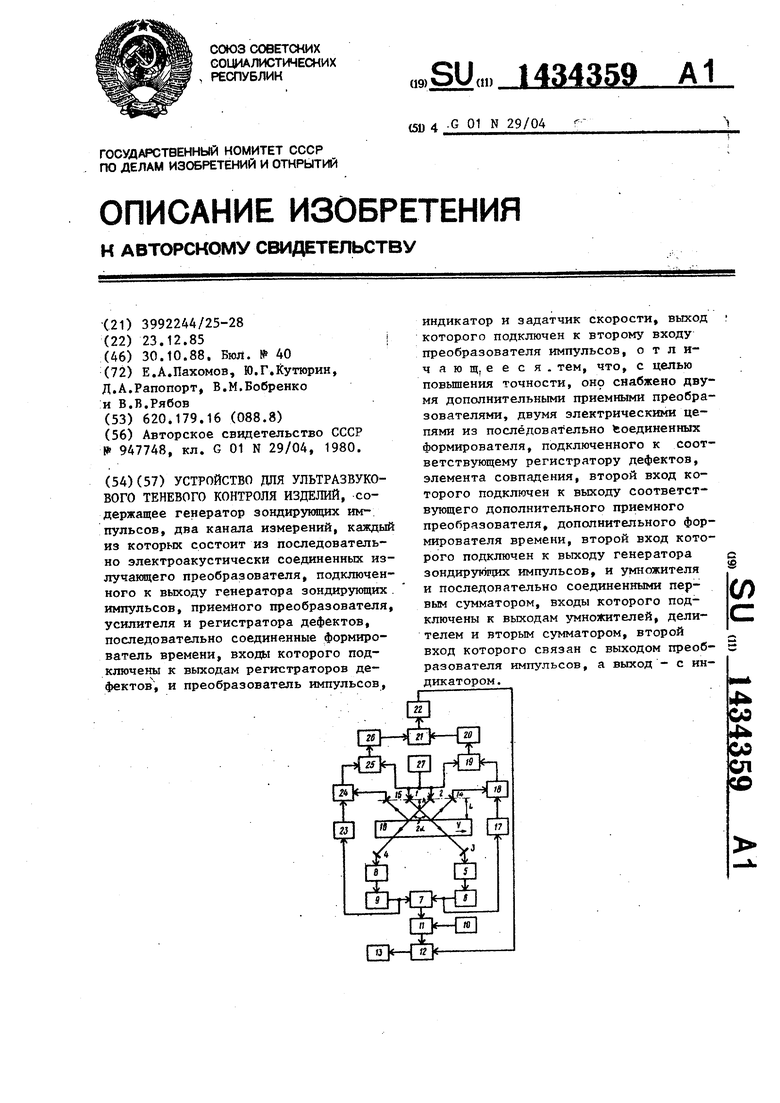
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит излучающие преобразователи 1 и 2 и приемные преобразователи 3 и 4, установленные по р(-схеме. Приемный преобразователь 3 |подключен через последовательно сое{циненные усилитель 5 и регистратор 6 (Дефектов к формирователю 7 времени, (к другому входу которого подключен Приемный преобразователь 4 через по- Следовательно соединенные усилитель Щ и регистратор 9 дефектов. Устрой- ICTBO содержит также последовательно Соединенные задатчик 10 скорости v, Преобразователь 11 импульсов, второй |вход которого подключен к выходу фор- рователя 7 времени, сумматор t2 и (индикатор 13, дополнительные приемные преобразователи 14 и 15, предназ:на- |ченные для установки в одной плоскости с излучающими преобразователями 1 и 2 параллельно направлению перемещения контролируемого изделия 16, по- следовательно соединенные формиро- |ватель 17, входом подключенный к вы- |Ходу регистратора 6 дефектов, элемент i18 совпадения, второй вход которого |подключен к выходу дополнительного :преобраэователя 14, формирователь 19 времени , умножитель 20, сумматор 21 и делитель 22, выход которого связан с вторым входом сумматора 12. Последовательно соединенные |формярователь 23, вход которого подключен к выходу регистратора 9 дефектов, элемент 24 совпадения, вторым входом подключенный к приемному преобразователю 15, формирователь 25 времени и умножитель 26, выход которого связан с вторым входом сумматора 21. Генератор 27 зондирующих импульсов подключен к излучающим преобразователям 1 и 2 и вторым входам формирователей 19 и 25 време-ни.
Устройство работает следующим образом.
5
0
5
0
5
0
5
0
5
Излучающие преобразователи 1 и 2, возбуждаемые генератором 27 зондирую- ,щих импульсов, излучают в контролируемое изделие 16 ультразвуковые колебания. Ультразвуковые колебания, отраженные от ближайшей к излучающим преобразователям поверхности контролируемого изделия, принимаются приемными преобразователями 14 и 15, настраиваемыми на максимум амплитуды отраженного от поверхности ультразвукового сигнала. Ультразвуковые колебания, прошедшие через изделие, принимаются приемными преобразователями 3 и 4. Изделие в процессе контроля перемещается относительно ультразвуковых преобразователей со скоростью V. Сигналы с приемных преобразовате-. лей 3 и 4 усиливаются усилителями 5 и 8 и поступают на регистраторы 6 и 9 дефектов, выполненные ,в виде пороговых устройств, обеспечивающих сравнение входного сигнала с пороговым. При превышении амплитудой входного сигнала порогового значения на выходе соответствующего регистратора дефектов формируется сигнал логического нуля. Если входной сигнал по амплитуде не превьшает порогового знач.ения на выходе регистратора дефектов формируется сигнал логической единицы.
При обнаружении дефекта первой парой .преобразователей 2 и 3 первый регистратор 6 дефектов формирует на своем выходе сигнал логической единицы, поступающий на вход первого формирователя 17 импульсов и первый вход первого формирователя 7 времени. С приходом этого сигнала первьш формирователь 17 импульсов формирует на своем выходе управляющий импульс, ступаннций на второй вход усилителя элемента 18 совпадения,Последний пропускает на свой выход сигнал с приемного преобразователя 14р который поступает на первый вход формирователя 19 времени. Второй вход формирователя 19 времени подключен к выходу генератора 27 зондирующих импульсов. Формирователь 19 времени формирует на своем выходе сигнал, пропорциональный интервалу времени между приходом на второй вход формирователя 19 сигнала с генер1ато- ра 27 зондирующих 1 мпульсов и приходом на вход формирователя сигнала с выхода элемента 18 совпадения. Сигнал с выхода формирователя 19 времени поступает на вход умножителя 20, при этом на его выходе формируется сигнал, пропорциональный величине
и.
&t, -УЧ,,
COSei,
it,
где об - половина угла между направлениями излучения излучающих преобразователей; время задержки в приеме ультразвукового сигнала излучающего преобразователя 2 приемным преобразователем 14, определенное при обнаружении дефекта парой преобразователей 2 и 3; скорость распространения ультразвука в среде между
«к
преобразователями и изделием.
Этот сигнал поступает на первый вход первого сумматора 21.
При обнаружении дефекта парой преобразователей 1 и 4 второй регистра- т.ор 9 дефектов формирует на своем выходе сигнал логической единицы, по- стулающий на вход второго формирователя 23 импульсов и второй вход формирователя 7 времени. При этом первый формирователь 7 времени формирует интервал времени t между моментами обнаружения дефекта парой преобразователей 2 и 3 и парой преобразователей 1 и 4. С помощью преобразователя 11 импульсов осуществляется преобразование этого интервала времени в сигнал Uj, пропорциональный расстоянию от точки пересечения направлений излучения преобразователей до дефекта:
и - 2
ctgoi.
Этот сигнал поступает на первый ;рход сумматора 12. При обнаружении
Ю5
20
. 25 30
434359
дефекта парой преобразователей 1 и
4 одновременно с описанным выше формирователь 23 импульсов по сигналу с регистратора 9 дефектов формирует на своем выходе управляющий импульс, поступающий на второй вход элемента 24 совпадения, который пропускает на свой выход сигнал с приемного преобразователя 15, который поступает на первый вход формирователя 25 времени. Второй вход формирователя- 25 времени подключен к выходу генератора 27 зондирующих импульсов. Формирователь 25 времени формирует на своем выходе сигнал, пропорциональный интервалу времени между приходом на второй вход формироватеху сигнала с генератора 27 зондирующих импульсов и приходом на первый вход формирователя 25 времени сигнала с выхода элемента 24 совпадения. Сигнал с выхода формирователя 25 времени поступает на вход умножителя 26, п ри этом на его выходе формируется сигнал, пропорциональный величине
з
&t. V
Vi.
COSol,
где ut - время задержки в приеме
ультразвукового сигнала излучающего преобразователя 1 приемным преобразователем 15, определенное при обнаружении дефекта парой преобразователей 1 и 4.
Этот сигнал поступает на второй вход сумматора 21. При этом на выходе сумматора 21 формируется сигнал, пропорциональный величине , которьй поступает на вход делителя 22. Делитель 22 обеспечивает определение величины /2114.. Сумматор 12 обеспечивает определение точного значения глубины залегания дефекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового теневого контроля изделий | 1985 |
|
SU1259181A1 |
| Устройство для ультразвукового теневого контроля изделий | 1986 |
|
SU1352346A1 |
| Способ ультразвукового теневого контроля изделий | 1987 |
|
SU1422140A1 |
| Способ ультразвукового теневого контроля изделий и устройство для его осуществления | 1985 |
|
SU1298650A2 |
| Способ ультразвуковой дефектоскопии трехслойных конструкций и устройство для его осуществления | 1988 |
|
SU1633354A1 |
| Устройство для ультразвукового контроля движущихся изделий | 1985 |
|
SU1270685A1 |
| Устройство для ультразвукового контроля движущихся изделий | 1986 |
|
SU1415172A1 |
| Ультразвуковой способ контроля дефектов изделия | 1989 |
|
SU1640631A1 |
| Способ ультразвукового теневого контроля изделий и устройство для его осуществления | 1980 |
|
SU947748A1 |
| Ультразвуковой зеркально-теневой дефектоскоп | 1983 |
|
SU1089511A1 |
| Способ ультразвукового теневого контроля изделий и устройство для его осуществления | 1980 |
|
SU947748A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
