Изобретение относится к сейсморазведке, а именно к вибрационным ис- точникам сейсмических сигналов, при- меняемым при поисках и разведке неф- . тяных и газовых месторождений, Целью изобретения является повышение разрешающей способности ггутем улучшения соответствия выходного сигнала исходному управляющему сигналу, |0
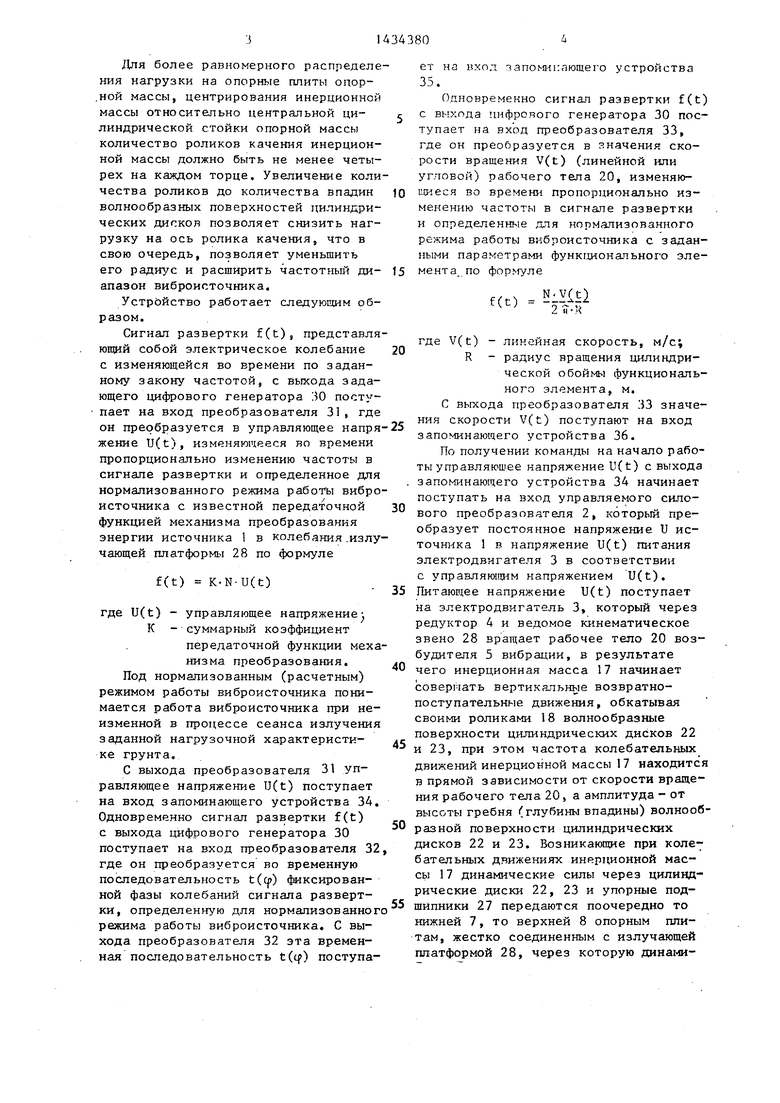
На фиго приведена структурная схема вибрационного источника сейсмических сигналов и возбудитель вибра ций; .на фиг,2 - вариант .исполнения возбудителя вибраций, разрезу
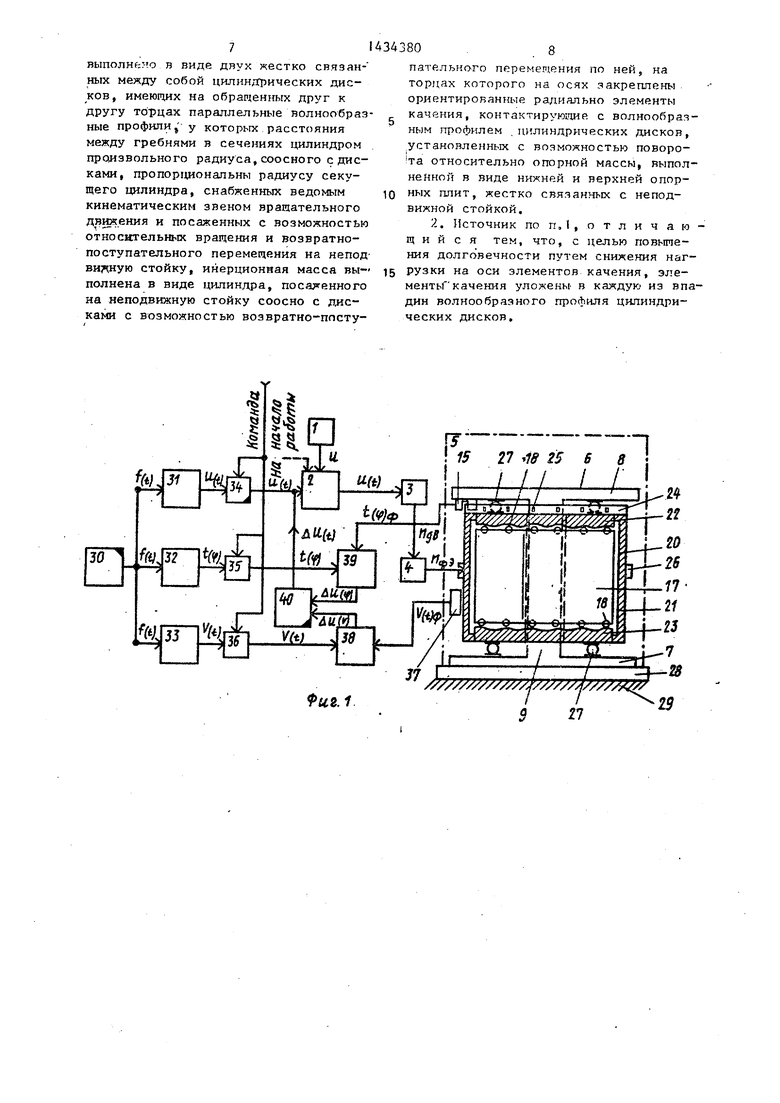
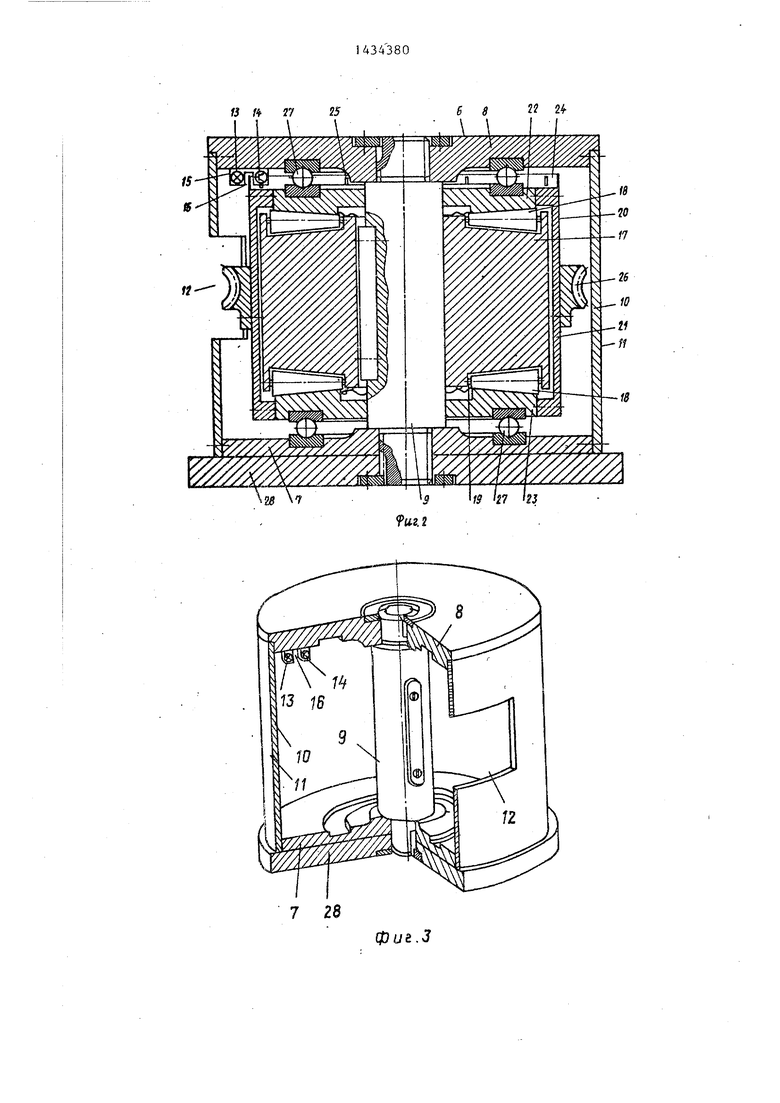
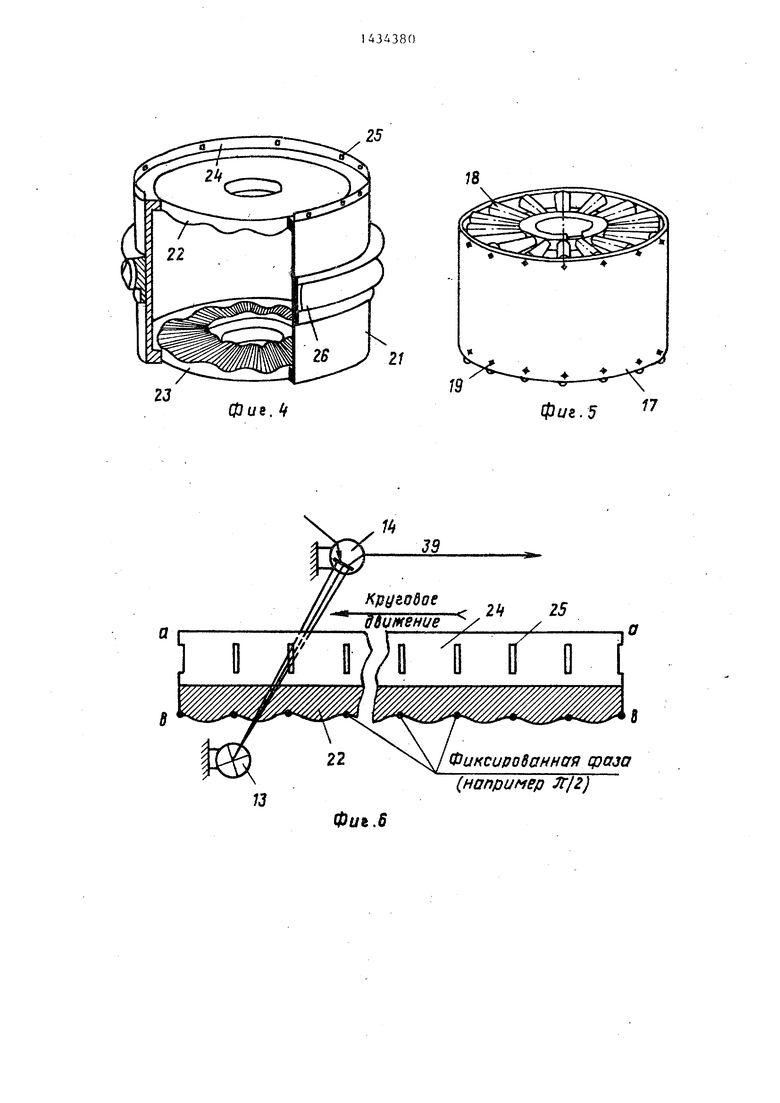
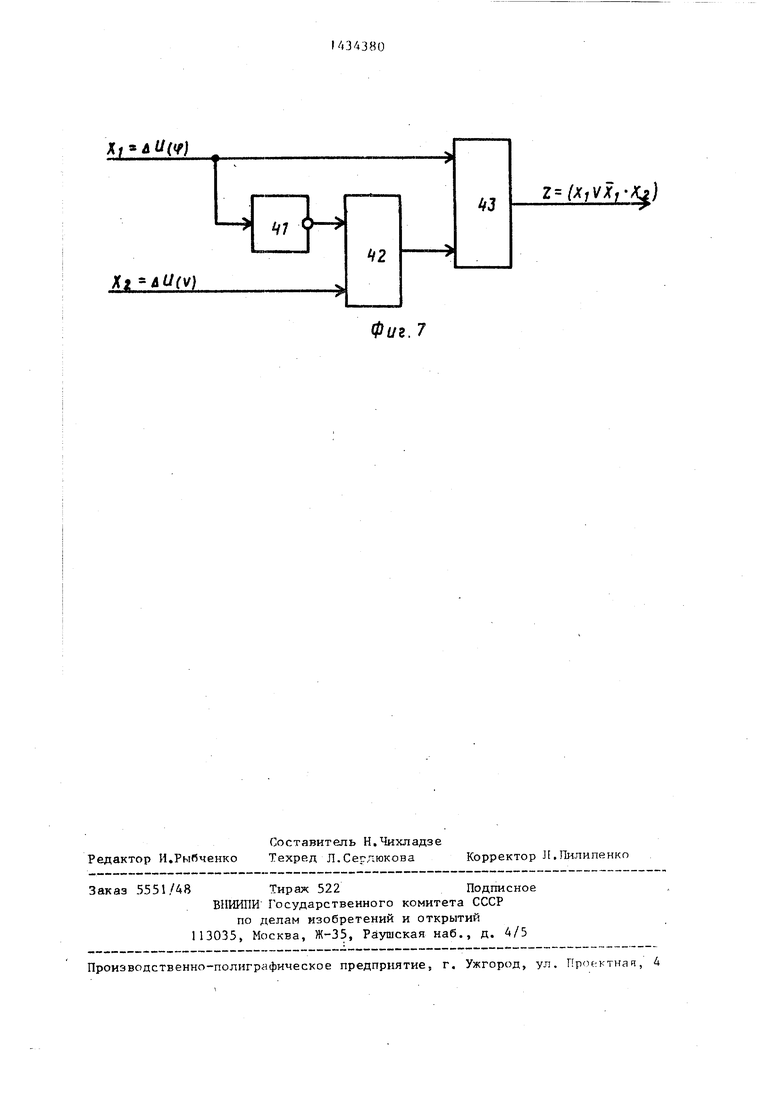
фиГоЗ - опорная масса, общий вид с вырезом; на-фиг,4 - рабочее тело, общий вид с вырезом; на фиг,5 - инерционная масса, общий вид; на фиг,6 - схема работы датчика фиксированной 20 фазы; на фиг.7 - схема логического блока.
Вибрационный источник сейсмических сигналов состоит из источника постоянного электрического напряже- ния, управляемого силового преобразователя 2, электродвигателя 3 постоянного тока, редуктора 4, возбудителя 5 вибраций, содержащего опорную массу 6, состоящь ю из нижней 7 и верх-30 ней 8 опорных плит, жест.ко связанных между собой с возможностью регулирования расстояния центральной цилиндрической стойкой 9 и пластинами 10, соединяющими края опорных плит 7 и 8 35 и образующими изнлиндрическую поверхность 11 с окном 12. Верхняя опорная, плита 8 снабжена источни.ком 13 света и фототранзистором 14 датчика 15 фиксированной фазы, разделенных зазором 40 16, На центральную цилиндрическую стойку 9 опорной массы 6 насажена свободно без вращения инерционная масса 17 в виде стального .цилиндра с осевым отверстием, торцовые поверх- 45 ности которого снабжены Koi-шческими роликами 18 качения, вращающимися на закрепленных в инерционной массе осях 19 Рабочее тело 20 выполнено в вида легкой цилиндрической обоймы д
21, охватывающей своими основаниями верхний 22 и нижний 23 ш-шиндричес- кие диски с осевым отверстием, внутренние торцовые поверхности которых имеют волнообразный профиль, изменяю- щийся по синусоидальному закону по окружности диска. Вдоль верхней кромки цилиндрической обоймы 21 закреплен кольцевой экран 24 15 фиксированной фазы с возможностью поиоро та вокруг своей оси, выполненный в виде цилиндрической кольцевой проверхности с отверстиями 25. На внешней боковой поверхности цилиндрической обоймы 21 размещено ведомое кинематическое звено 26 механизма передачи вращательного движе гая редуктора 4. В зазорах между рабочим телом 20 и верхней 8 и нижней 7 опорными плитами опорной массы б расположены упорные подшипники 27, Нижняя опорная плита 7 жестко связ.ана. с излучающей платформой 28, находящейся в постоянном контакте с грунтом 29. Система следящего управления включает в себя задающий цифровой генератор 30 управляющего сигнала развертки, преобразователь 31 сигнала развертки в управляющее напряжение, преобразователь 32 сигнала развертки во временную последовательность фиксированной фазы колебаний сигнала развертки, преобразователь 33 сигнала развертки в значения ско- ,рости вращения (линейной или угловой) рабочего тела 20, запоминающее уст-, ройство 34 управляющего напряжения, запоминающее устройство 35 временной последовательности фиксированной фазы, запоминающее устройство 36 значений скорости вращения элемента 20 и датчик 37 скорости вращения рабочего тела 20, компаратор 38, блок 39 сравнения,-устройство 40 ввода коррекции управляющего сигнала. Логический блок содержит элементы НЕ 41, И 42 и ИЛИ 43,
Число N гребней (впадин) цилиндрического дчска определяется по формуле N - , где f(t) - частота сигнала развертки, 1/с; п - число оборотов цилиндрического диска, 1/с.
Выбранное по этой зависимости число гребней (впадин) позволяет при ограниченном числе оборотов цилиндрического диска получить требуемые частоты сигнала развертки.
- Высота гребня или впадины цилиндрических .цисков h определяется из условия
F, ni,.(t).h,.. .
где ,j( - максимальная сила, развиваемая виброисточником, И;
т . - величина инерционной массы . кг
Для более равномерного распределения нагрузки на опорные плиты опор- ,ной массы, центрирования инерционной массы относительно центральной ци- линдрической стойки опорной массы количество роликов качения инерционной массы должно быть не менее четырех на каждом торце. Увеличение количества роликов до количества впадин волнообразных поверхностей цилиндрических дисков позволяет снизить нагрузку на ось ролика качения, что в свою очередь, позволяет уменьшить его радиус и расширить частотньш ди- апазон виброисточника.
Устройство работает следующим образом.
Сигнал развертки f(t), представляющий собой электрическое колебание с изменяющейся во времени по заданному закону частотой, с выхода задающего цифрового генератора 30 поступает на вход преобразователя 31, где он преобразуется в управляющее напряжение U(t), изменяющееся во времени пропорционально изменению частоты в сигнале развертки и определенное для нормализованного режима работы виброисточника с известной передаточной функцией механизма преобразования энергии источника 1 в колебания .излучающей платформы 28 по формуле
f(t) K-N-U(t)
где U(t) - управляющее напряжение- К - суммарный коэффициент
передаточной функции механизма преобразования. Под нормализованным (расчетным) режимом работы виброисточника понимается работа виброисточника при неизменной в процессе сеанса излучения заданной нагрузочной характеристи- ке грунта.
С выхода преобразователя 31 управляющее напряжение U(t) поступает на вход запоминающего устройства 34. Одновременно сигнал развертки f(t) с выхода цифрового генератора 30 поступает на вход преобразователя 32 где он преобразуется во временную последовательность t(cp) фиксированной фазы колебаний сигнала развертки, определенную для нормализованног режима работы виброисточника, С выхода преобразователя 32 эта временная последовательность t(cp) поступа-
г 5
0 5 0
5
Q
0
5
ет на вход запоминающего устройства 35.
Одновременно сигнал развертки f(t) с выхода цифрового генератора 30 поступает на вход преобразователя 33, где он преоГэразуется в значения скорости вращения V(t) (линейной или угловой) рабочего тела 20, изменяющиеся во времени пропорционально изменению частоты в сигнале развертки и определенные для нормализованного режима работы виброисточника с заданными параметрами функционапьного элемент а по
f(t) . 2 и н
где V(t) - линейная скорость, м/с;
R - радиус вращения цилиндрической обоймы функционального элемента, м.
С выхода преобразователя 33 значения скорости V(t) поступают на вход запоминающего устройства 36.
По получении команды на начало работы управляюшее напряжение U(t) с выхода запоминающего устройства 34 начинает поступать на вход управляемого силового преобразователя 2, который преобразует постоянное напряжение U источника 1 в напряжение U(t) питания электродвигателя 3 в соответствии с управляю1 им напряжением U(t). Питающее напряжение U(t) поступает на электродвигатель 3, который через редуктор 4 и ведомое кинематическое звено 28 вращает рабочее тело 20 возбудителя 5 вибрации, в результате чего инерционная масса 17 начинает совертчать вертикальные возвратно- поступательные движения, обкатывая своими роликами 18 волнообразные поверхности цилиндрических дисков 22 и 23, при этом частота колебательных движений инерционной массы 17 находится в прямой зависимости от скорости вращения рабочего тела 20, а амплитуда - от высоты гребня (глубины впадины) волнообразной поверхности цилиндрических дисков 22 и 23. Возникающие при колебательных движениях инерционной массы 17 динамические силы через цилиндрические диски 22, 23 и упорные подшипники 27 передаются поочередно то нижней 7, то верхней 8 опорным плитам, жестко соединенным с излучающей платформой 28, через которую дина1 1Ические нагрузки передаютс грунту , 29, постоянно находящемуся в контакте с платформой 28,
При выполнении условия о неизменности сопротивлегшя нагрузки (нагрузочной характеристики грунта) коле- бания излучающей ппатформь 28 происходят в соответствии с колебаниями
ванной фазы колебаний. В случае несовпадения моментов прохождения сиг напов блок 39 сравнения вырабатывает сиг- g нал AU(q), пропорциональный величиго происходит компенсация фазовых искажений выходного сигнала. Цепь компенсации фазовых искажений наделене расхождения, который через устройство 40 ввода коррекции поступает на вход управляемого силового преобразователя 2 и корректирует управляю- ;сигнала развертки. Однако из-за нели- IQ щее напряжение U(t) так, чтобы свес- ;нейности нагрузочной характеристикити расхождение к нулю, за счет че грунта 29 фактическая скорость вра- ения V(t).j рабочего тела 20 в процессе работы виброисточника может
ютклоняться от V(t), рассчитанной для g на приоритетом по отношению к цепи нормализованного режима работы, чтокомпенсации частотных искажений,, реализуемом в логическом блоке устройства 40 ввода коррекции, который запрещает прохождение корректирующего сиг- 20 нала uU(V) цеш-5 компенсации частотных искажений на вход управляемого силового преобразователя 2, если в цепи компенсации фазовых искажений действует сигнал коррекции фазы uU(q). 25 Пример осуществления логического блока с такой функцией показан на
приводит к отклонению частоты и фа- |зы излучаемых- колебаний от частоты и |фазы колебаний исходного управляюще- 1го сигнала развертки, : Компенсация частотно-фазовых иска- жений выходного сигнала виброисточни- |ка, происходящих из-за нелинейности
|нагрузочной характеристики грунта, Iпроисходит следующим образом. Дат- |чик 37 скорости вращения постоянно Выдает значения мгновенной скорости |v(t)cp рабочего тела 20i Эти значения iпоступают на один из входов компарафиг.7.
Изобретение позволит повысить разрешающую способность вибрационной
е
-
Д343806
ванной фазы колебаний. В случае несовпадения моментов прохождения сиг напов блок 39 сравнения вырабатывает сиг- g нал AU(q), пропорциональный величине расхождения, который через устройство 40 ввода коррекции поступает на вход управляемого силового преобразователя 2 и корректирует управляю- - IQ щее напряжение U(t) так, чтобы свес- ти расхождение к нулю, за счет чего происходит компенсация фазовых искажений выходного сигнала. Цепь компенсации фазовых искажений наделефиг.7.
Изобретение позволит повысить разрешающую способность вибрационной

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2570587C1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2023 |
|
RU2818018C1 |
| Устройство для управления сейсмическим вибратором | 1982 |
|
SU1084762A1 |
| Вибрационный источник сейсмических сигналов | 1986 |
|
SU1543360A1 |
| Способ вибрационной сейсморазведки | 2018 |
|
RU2695057C1 |
| Способ возбуждения вибрационных сейсмических сигналов и устройство для его осуществления | 1983 |
|
SU1277033A1 |
| Источник сейсмических сигналов | 1990 |
|
SU1817052A1 |
| Сейсмический вибратор | 1984 |
|
SU1236399A1 |
| Устройство для вибрационного возбуждения сейсмических волн | 1981 |
|
SU1291915A1 |
| Устройство управления вибрационным источником сейсмических сигналов | 1977 |
|
SU661460A1 |
Изобретение относится к сейсмической разведке, к вибрационным ис- точникам сейсмических сигналов. Цель изобретения - повышение разрешающей способности путем улучшения соответствия выходного сигнала исходному управляющему сигнапу. В источнике инерционная и опорная массы взаимодействуют между собой через рабочее твердое тело, которое является по отношению к этим массам источником вынуждающей силы и носителем программы их относительного движения. При этом параметры волнообразной поверхности твердого тела определяют форму и амплитуду относительного движения масс, а скорость вращения твер дого тела - его частоту. Кроме того, с целью повышения долговечности путем снижения нагрузки на оси роликов качения контактирующих с поверхностью твердого тела, ролики уложены в каждую из впадин волнообразной поверхности рабочего тела. 1 з.п. ф-лы, 7 ил. 9 сл 4 СО 4;аь СО 00
JTOpa 38J на другой вход которого из- зо сейсморазведки за счет большего соответствия излучаемого, выходного, и управляющего сигналов виброисточника. Оно позволяет отказаться от требова ния медленного линейного изменения частоты в управляющем сигнале развертки, обязательного при использовании известных вибрационных источни35
запоминающего устройства 36 поступает 1расчетное для данного момента време- |ни значение скорости вращения рабоче- :го тела 20. Компаратор 38 сравнивает |з начения фактической и расчетной iскоростей и при их несовпадении выра- 1батывает сигнал Al)(V)p щзопорциональ- ный величине рассогласова адя, который через устройство 40 ввода коррек:ции поступает на вход управляемого 40 частоты, за счет чего может быть силового преобразователя 2 и корректи- сокращено вре,мя сеанса излучения и рует управляющее напряжение UCt), сводя расхо;кдение к нулю и компенсируя частотные искажения выходного сигнала виброисточника.45
Для компенсшдии фазовых искажений выходного (излучаемого) сигнала
датчик 15 фиксированной фазы выдаетэнергии, управляемый силовой првобрадискретнке (импульсные) сигналы о мо- зователь, возбудитель вибрации, вклю- ментах времени прохождени.я инерцион-о 50 чающий инерционную и опорную массы, ной массой 17 определенной фиксирован- контакт ирующие с размещенным между ной фазы совериаемых ею колебатель-ними рабочим телом, излучаюр ую пл,атных движений (например ir/2). Этотформу, жестко связанную с опорной
дискретный сигнал t(cp)ф поступаетмассой, и систему следящего управлена один из входов блока 39 сравнештя,, 55 ия, отлич ающийся тем, на другой вход которого из запоминаю- что, с целью повышения разрешающей щего устройства 35 поступает сигналспособности путем улучшения соот зетt(q)) о расчетном времени прохожденияствия выходного сигнала исходно:му ,
инерционной массой 17 той же фиксирр- управляющему сигналу, рабочее тело
ков, и задавать управляющий сигнал развертки с любым законом изменения
тем самым повышена производительность вибрационной сейсморазведки. Формула изобретения
1, Вибрационный источник сейсмических сигналов, содержащий источник.
ков, и задавать управляющий сигнал развертки с любым законом изменения
частоты, за счет чего может быть сокращено вре,мя сеанса излучения и
тем самым повышена производительность вибрационной сейсморазведки. Формула изобретения
1, Вибрационный источник сейсмических сигналов, содержащий источник.
выполнено в виде двух жестко связан- ных между собой цилиндрических дисков, имеюгчих на обрагленных друг к другу торцах параллельные волнообразные профили у которых расстояния между гребнями в сечениях цилиндром прО|Из вольно го радиуса, соосного с дисками, пропорциональны радиусу секущего цилиндра, снабженных ведомым кинематическим эвеном вращательного двдасения и посаженных с возможностью относдагельных вращения и возвратно- поступательного перемещения на непод- видную стойку, инерционная масса выполнена в виде цилиндра, посаленного на неподвижную стойку соосно с длс- ками с возможностью возвратно-ппстуI
§1 (Г
.1
пательного перемещения по ней, на торцах которого на осях закреплены ориентированные радиально элементы качения, контактирующие с волнообразным профилем . щ линдрических дисков, установленных с возможностью поворо- та относительно опорной массы, выполненной в виде нижней и верхней опорных плит, жестко связанных с неподвижной стойкой.
г;
27 18 25 6 8
1
2« 2
.to
26
.17
21
.23
LL
37 Ir.
Т
////////// // / //// ///l // f y
I 27
v$
29
fj 27
25
B f
2 2f
фи&.З
Фие.
Kfifj&odoeс«-..., 2415
ддик(8Н1/е у /Q
13
.5
фиг. 5 7
39
ФиксироЬанная cpajg (например Jr/2)
Фиг. 7
