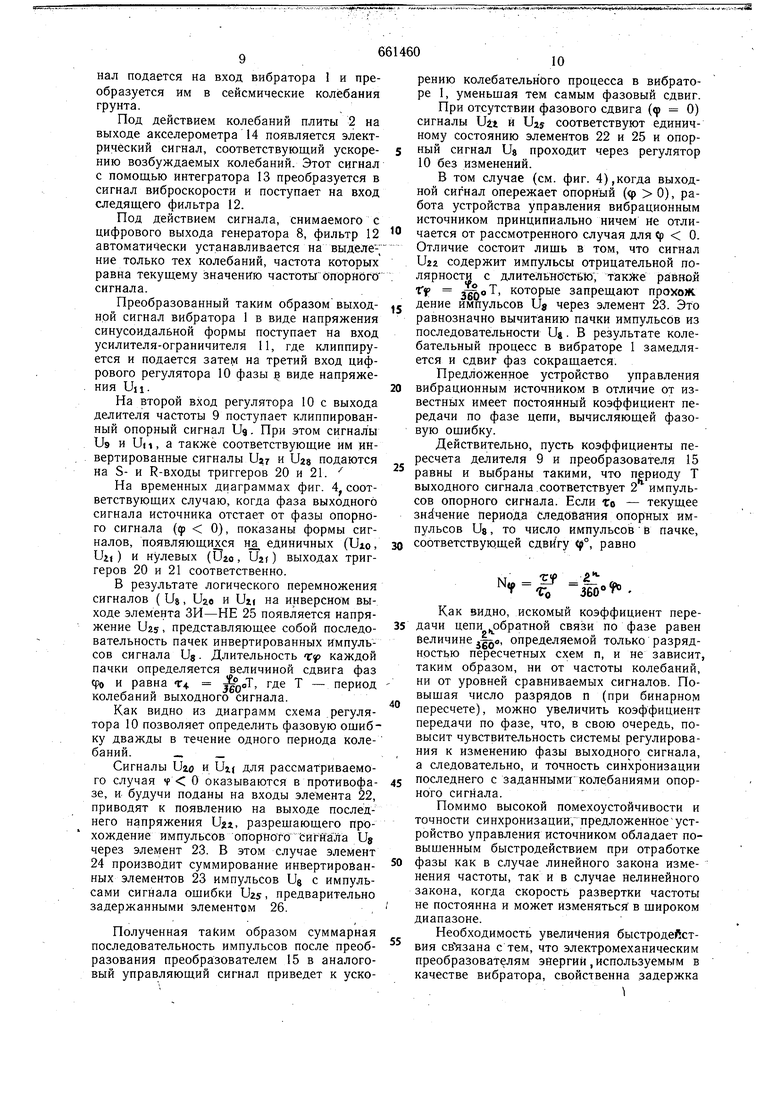
нала. Это вызвано тем, что в выходном акселерометра уровень помех, связанных с работой различных, мезанизмов вибратора, имеет значительную величину и на низких частотах может намного превысить уровень полезного сигнала. Последнее обстоятельство неизбежно приводит к ошибкам при определении рассогласования фаз опорного и выходного сигналов, и, как следствие, к фазовым искажениям возбуждаемых колебаний. В устройствах 3 в целях йсклю чения искажений при передаче по радиоканалу опорный сигнал формируется непосредственно на вибрационных источниках, для чего В схему управления каждого из них введен генератор опорного сигнала, аналогичный генератору, установленному на сейсмостанции. В определенный момент времени регистратор последней вырабатывает стартовый импульс, по которому запускаются оба генератора. Передача стартового импуль с,а.рт сейсмостанции к вибрационному истОч,-нику осуществляется по радиоканалуёвязи, включающему в себя на передающей стороне радиопередатчик с шифратором, а на приемной стороне - радиоприемник, дешифратор и блок задержки запуска. Опорные сигналы, формируемые обоими генераторами строго идентичны по форме и могут быть смещены друг относительно друга во времени на любую заранее установленную величину. Наиболее близкимпо технической сущности к настоящему изобретению является устройство управления вибрационным источником, содержащее преобразователь код-аналог, выход которого соединен с управляющий входом вибрационного источника, генератор опорного сигнала с радиоканалом дистанционного запуска на входе и интегратор, подключенный к выходу акселерометра, установленного на опорной плите вибрационного источника 4 .. . В этом устройстве суммирующий усилитель гидравлического вибратора является объектом управления. Один из трех входов суммирующего усилителя служит для ввода опорного,сигнала, а два других - для образования местных обратных связей: по скорости потока жидкости, направляемой в полости гидроцилиндра вибратора, и по смещению инертной массы относительно порщня. жестко связанного с опорной плитой. Для этого сервозолотник, перераспределяющий поток .жидкости, и масса тйдроцилйндра сна.бжены соответственно двумя датчиками смещения. Вибратор и суммирующий усилитель,,охваченные местными обратными связями, образуют, таким образом, электрогидра.вл.ический преобразователь колебаний электрического сигнала в сейсмические колебания грунта. Помимо электрогидравлического преобразователя, рассматриваемого как объект регулирования, и элементов радиоканала, предназначенных для приема стартового импуль- са, система управления известного источника содержит два идентичных генератора импульсов линейно изменяющейся частоты и контур обратной связи по фазе. При этом один из генераторов формирует опорный сигнал; а другой - сигнал управления вибратором, который в принципе идентичен опорному сигналу. На выходах каждого из указанных генераторов установлены преобразователи код-аналог, преобразующие последовательности кодовых значений сигнала в напряжения синусоидальной формы. Контур обратной связи по фазе в известном источнике построен таким образом, что выходные сигнйЛЫ акселерометра, установленного на опорной плите вибратора, и датчика смещений инертной массы подаются на суммирующие входы интегрирующего усилителя, охваченного также цепью, АРУ. Выход интегрирующего усилителя связан с одним из двух входов аналогового перемножителя, на второй вход которого через корректирующую цепь подается выходное напряжение первого генератора опорного сигнала. Результат перемножения поступает на вход интегратора, включаемого во время развертки опорного сигнала. Выходное напряжение интегратора преобразуется в,последовательность импульсов, задающих скорость выборки «слов второго генератора, формирующего управляющий сигнал вибратора. В зависимости от рассогласования по фазе сигналов, поданных на входы перемножителя, происходит увеличение или уменьшение скорости выборки «слое второго генератора. Это равнозначно смещению во времени управляющего сигнала относительно опорного сигнала, скорость выборки слов которого остается постоянной. Как следует из, анализа элементов и связей функцйднал1Гной схемы, способ синхронизации по фазе, реализованный в устройстве 4, хотя и более совершенен по сравнению с фазовой коррекцией в устройствах , тем не менее и он имеет ряд серьезных недостатков. Рассмотрим некоторые из них. Так, на вход перемножителя в качестве выходного сигнала вибратора подается сумма сигналов акселерометра и датчика смещений инертной массы. Суммирование этих сигналов производится с цельюувеличения общего уровня полезного сигнала вибратора на низких частотах, снижая тем самым влияние помех от действующих механизмов (например, от главного приводного Двигателя, от двигателя автомобиля и т.п.). При этом используется то обстоятельство, что смещения массы в области низких частот намного превышают уровень виброускорений плиты и уменьшаются по мере возрастания частоты. Уровень сигнала датчика смещений на частотах выше 20-25 Гц становится ниже уровня сигнала акселерометра и продолжает плавно убывать. Суммирование этих сигналов основано на допуш,ении, что виброускорение плиты и смепдения массы в области низких частот происходят в фазе. Как показывают расчеты динамических характеристик гидравлического вибратора и результаты экспериментальной проверки, указанное допущение весьма условно. Так, условие синфазности, при котором отклонение фаз указанных колебаний не превышает значения (ср) 10 °, удовлетворяется только в весьма узкой полосе частот (от О до 8-10 Гц). Если учесть что в корреляционном способе вибрационной сейсморазведки обычно реализуется диапазон частот от 5 до 100 Гц, а требуемая при этом точность синхронизации по фазе сигналов де должна быть ниже (tf) 3°, то становится очевидным недопустимость использования суммы двух несинфазных сигналов в качестве выходного сигнала вибратора. Несинфазность колебаний инертной массы и опорной плиты вызвана наличием .в рабочем диапазоне частот ряда резонансов механической схемы вибратора, обусловленных, например, сжимаемостью ра- бочей жидкости, наличием упругих элементов в прижимном устройстве, а также резонансными явлениями в системе вибраторгрунт. Другим недостатком устройства 4 является то, что коэффициент передачи цепи. осуществляющеи усилие, перемножение и интегрирование произведения сравниваемых сигналов, не постоянен и зависит в рабочем диапазоне частот как от величины сдвига фаз, так и от уровня сравниваемых сигналов. Кроме того, поскольку регулирование фазы в известном источнике выполнено по схеме следящей системы с интегральным управлением, то, как известно из теории следящих систем, введение в закон управления сигнала, пропорционального интегралу ощибки, ухудшает устойчивость системы к самовозбуждению, понижает ее быстродействие, проявляющееся в увеличении длительности переходного процесса при быстрых изменениях фазы. Из условий поддержания статических и динамических характеристик такой системы в заданных пределах следует достаточно жест кое требование к постоянству коэффициента передачи в рабочем диапазоне частот и независимости от параметров регулируемых сигналов. Установленный для этой цели в устройстве 4 интегрирующий усилитель с цепью АРУ не может обеспечить постоянную амплитуду виброускорения хотя бы . потому, что автоматическая регулировка усиления производится в немне по одному полезному сигналу, а Посреднему значению суммарного сигнала. Наличие в последнем шумов, несинфазного сигнала датчика смещений массы, а также высших гармоник полезного сигнала, связанных с нелинейным характером колебаний опорной плиты, неизбежно приведет к значительной модуляции амплитуды виброускорения, определяющей стабильность коэффициента передачи цепи перемножчтель-интегратор, а следовательно, и к потере устойчивости и точности всей схемы регулирования фазы. Целью изобретения является повышение помехоустойчивости передачи колебаний, возбуждаемых вибрационным источником. Поставленная цель достигается тем, что в схему вибрационного источника дополнительно введены цифровой регулятор фазы, делитель частоты, усилитель-ограничитель и следящий фильтр, включенные таким образом, что импульсный выход опорного сигнала генератора подключен к первому и, через делитель частоты, ко второму входам цифрового регулятора фазы, который по выходу связан с входом преобразователя коданалог, а по третьему входу, через усилитель-ограничитель, - с выходом следящего фильтра. Сигнальный вход фильтра соединен с выходом интегратора, а управляющий вход - с цифровым выходом частоты генератора. Цифровой регулятор фазы выполнен в виде схемы, содержащей два RS-триггера, нулевые выходы которых через первый и второй элементы 2И-НЕ подключены к первому входу, а единичные выходы через эле мент ЗИ-НЕ и элемент задержки - ко второму входу третьего элемента 2И-НЕ. Sвход первого триггера,связанный через первый инвертор с S-входом второго триггера, R-вход второго триггера, связанный через второй инвертор с R-входом первого триггера,; и третий вход элемента ЗИ-НЕ, связанный со вторым входом второго элемента 2И-НЕ, являются, соответственно, вторым, третьим и первым входами, а выход третьего элемента 2И-НЕ - выходом цифрового регулятора фазы. На фиг. 1 представлена структурная схема предложенного устройства управления вибрационным источником сейсмических сигналов; на фиг. 2 - принципиальная схема цифрового регулятора фазы; на фиг. 3-4 временные диаграммы, поясняющие работу цифрового регулятора фазы, соответственно для случаев отставания и опережения фазы выходного сигнала. В качестве электромеханического преобразователя энергии устройство содержит (см. фиг. 1) вибратор 1 электрогидравлического типа, основными элементами которого
являются: опорная плита 2, жестко связанная с nopmHiBM тидроцилйндра, нагруженного инертной массой 3 и снабжённого датчиком 4 смещения, сервозолотник 5 с датчиком 6 его смещения и суммирующий усилитель 7, два входа которого использущся для образования местных обратных связей и подключены к выходам датчиков -4. и б, а третий вход служит для ввода управляющего сигнала.
Система управления источником содержит генератор 8 опорного сигнала, импульсный выход которого подключен к первому, и, через делитель 9 частоты, ко второму входам цифрового регулятора 10 фазы. Третий вход регулятора 10 через последовательно включенные, усилитель-ограничитель 11, следящий фильтр 12 и интегратор 13 соединен с выходом акселерометра 14, установленного на опорной плите 2 вибратора 1. Цифровой управляющий вход следящего фильтра 12 поразрядно связан с выходом текущего .значения частоты генератора 8. Выход регулятора 10 фазы подключен к счетному входу преобразователя 15 код-аналог, выход которого связан с управляющим входом вибратора 1.
Для синхронизации запуска генератора 8 с запуском аналогичного ге1нератора, установленного на регистрирующей станции, в системе управления вибрационным источником предусмотрен радиоканал 16 дистанционного запуска, включающий в себя радиостанцию 17, выход которой через дешифратор 18 и блок задержки 19 стартовых импульсов подключен к Пусковому входу генератора 8,
- БлТж задержки 19, установленный в цепи запуска генератора 8, рассчитан на смещение во времени начала развертки опорного сигнала. Такая необходимость возникает при использовании группы вибрационных источников в условиях Пересеченного рельефаместности и изменения параметров зоны малых скоростей для ввода статических поправок, а также при формировании направленного фронта волны.
В качестве генератора 8 может быть использовано любое известное устройство, способное формировать последовательность импульсов с частотой, изменяющейс по заданной программе, например по линейному закону, в пределах установленного диапазона;. Устройство должно обеспечивать высокую ст,абильность и точность воспроизведения основных параметров сигнала (по частоге и длительности развертки не хуже 0,001 %) и иметь цифровой выход текущего значения частоты. Запуск устройства долMliH осуществляться автоматически внещниМ Сигналом.
Следящий фильтр 12, введенный в цепь передачи выходного сигнала источника, мо6614QO
жет быть вьшолнен по схеме селективного усилителя с регулируемой частотно-задающей цепью. Параметры частотно-задающей цепи можно изменять с помощью ключевой схемы, управляемой кодом текущего значения частоты. Такая схема фильтра 12 позволяет осуществить автоматическую настройку его амплитудно-частотной характеристики на выделение первой гармоники возбуждаемого сигнала.
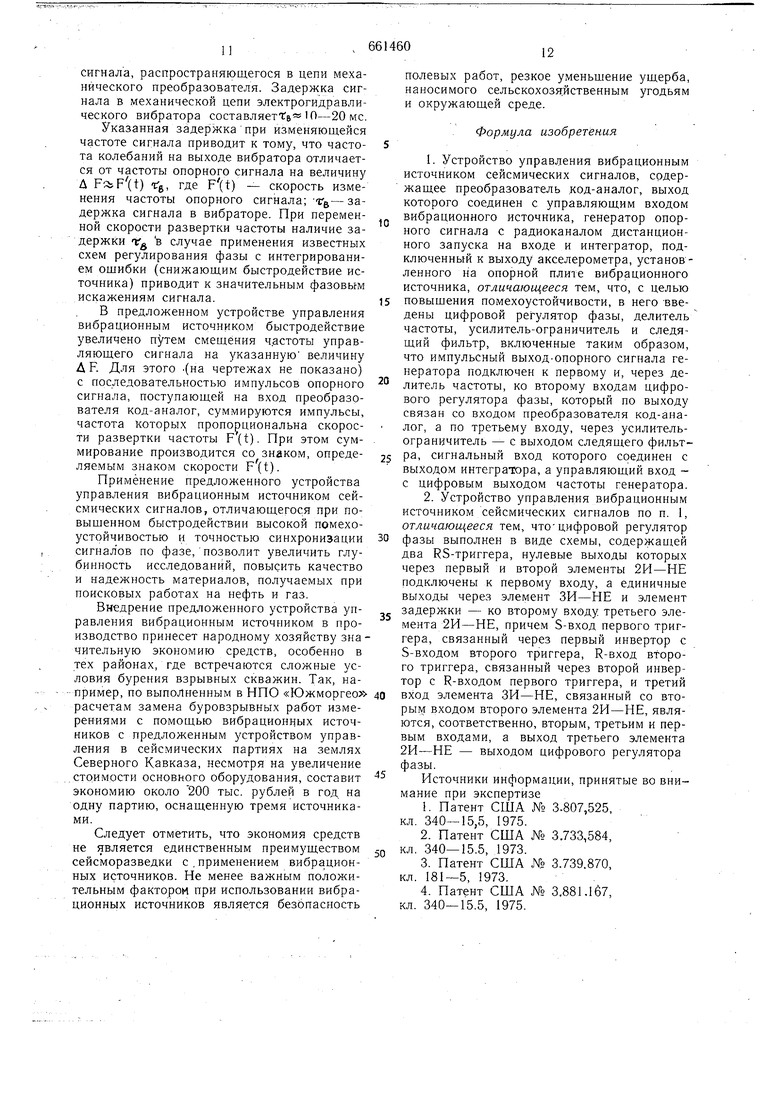
Цифровой регулятор 10 фазы (см. фиг. 2) представляет собой логическую схему, реализующую указанные особенности преобразования сигналов, и содержит два R S-триггера 20 и 21, три элемента 2И--НЕ 22-24, элемент ЗИ-НЕ 25, элемент 26 задержки и два инвертора 27 и 28.
Функциональные связи между указанными элементами регулятора 10 выполнены следующим образом.
Нулевые выходы триггеров 20, 21 подключены ко входам элемента 22, выход которого соединен с одним из двух входов элемента 2И-НЕ 23.
Первый вход регулятора фаЪы служит для ввода опорного сигнала и подключен ко второму входу элемента 23 и, к одному из трех входов элемента ЗИ-НЕ 25. Остальные два входа элемента ЗИ-НЕ связаны с единичными выходами триггеров 20 И 21.
Выход элемента ЗИ-НЕ 25 через элемент задержки 26 связан с одним из входов элемента 2И-НЕ 24, второй вход KOJOрого подключен к выходу элемента 2И-НЕ 23, а выход служит выходом регулятора 10.
Второй вход регулятора 10 фазы служит для ввода клиппированного опорного сигнала и подключен к S-входу триггера 20 и, через инвертор 27, к S-входу триггера 21.
Третий вход регулятора 10 служит для ввода клиппировайного выходного сигнала вибратора 1 и подключен к R-входу триггера 21 и, через инвертор 28, к R-входу триггера 20.
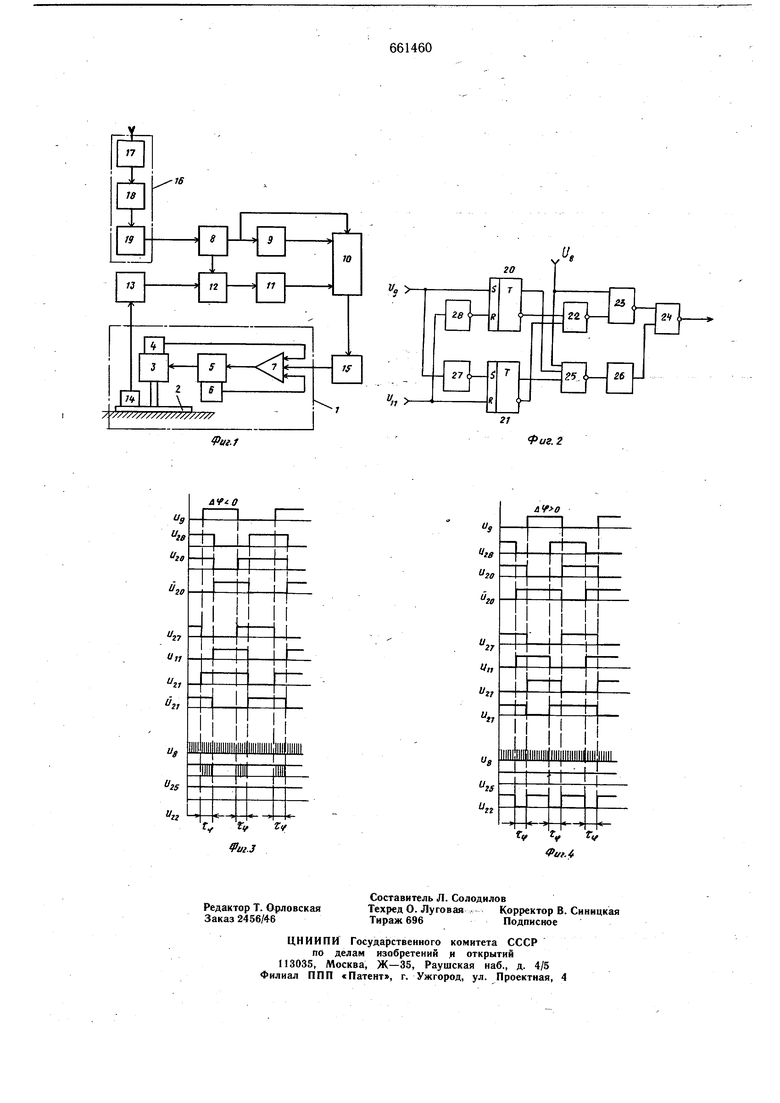
Работа устройства управления вибрационньш источником показана на примерах отработки фазы, когда скорость колебаний опорной плиты 2 вибратора 1 Меньще (фиг. 3) или больще (фиг. 4) скорости колебания опорного сигнала.
Стартовый импульс, переданный по радио От регистрирующей станции, принимается радиоканалом 16 и запускает генератор 8.
Опорный сигнал Uj (см. фиг. 1-3), представляющий собой последовательность коротких импульсов положительной полярности, с выхода генератора 8 через элементы 2И-НЕ 23 и 24 регулятора 10 фазы поступает на счетный вход преобразователя 15 код-аналог, где преобразуется в напряжение синусоидальной формы. Сформированный таким образом управляющий сигнал подается на вход вибратора I и преобразуется им в сейсмические колебания грунта.
Под действием колебаний плиты 2 на выходе акселерометра 14 появляется электрический сигнал, соответствующий ускорению возбуждаемых колебаний. Этот сигнал с помощью интегратора 13 преобразуется в сигнал виброскорости и поступает на вход следящего фильтра 12.
Под действием сигнала, снимаемого с цифрового выхода генератора 8, фильтр 12 автоматически устанавливается на выделе-; ние только тех колебаний, частота которых равна текущему значению частоты Опорного сигнала.
Преобразованный таким образом выходной сигнал вибратора 1 в виде напряжения синусоидальной формы поступает на вход усилителя-ограничителя 11, где клиппируется и подается затем на третий вход цифрового регулятора 10 фазы в виде напряжения Ui 1.
На второй вход регулятора 10 с выхода делителя частоты 9 поступает клиппированный опорный сигнал U9. При этом сигналы Us и U(i, а также соответствующие им инвертированные сигналы Uj/ и U28 подаются на S- и R-входы триггеров 20 и 21.
На временных диаграммах фиг. 4 соответствующих случаю, когда фаза выходного сигнала источника отстает от фазы опорного сигнала (ф 0), показаны формы сигналов, появляющи2(ся н единичных (Uio, Uit ) и нулевых (Uio, Ujr) выходах триггеров 20 и 21 соответственно.
В результате логического перемножения сигналов ( Us, Uae и Uzi на инверсном выходе элемента ЗИ-НЕ 25 появляется напряжение Uas. представляющее собой последовательность пачек инвертированных импульсов сигнала Ug. Длительность tf каждой пачки определяется величиной сдвига фаз сро и равна Т4 оТ, где Т - период колебаний выходного сигнала.
Как видно из диаграмм схема регулятора 10 позволяет определить фазовую ощибку дважды в течение одного периода колебаний.
Сигналы Uzo и 3ц для рассматриваемого случая f О оказываются в противофазе, и будучи поданы на входы элемента 22, приводят к появлению на выходе последнего напряжения Ujj, разрещающего прохождение импульсов опорного СйгнаЛа Ug через элемент 23. В этом случае элемент 24 производит суммирование инвертированных элементов 23 импульсов Ug с импульсами сигнала ощибки Uzs, предварительно задержанными элементом 26.
Полученная таКим образом суммарная последовательность импульсов после преобразования преобразователем 15 в аналоговый управляющий сигнал приведет к ускорению колебательного процесса в вибраторе 1, уменьщая тем самым фазовый сдвиг.
При отсутствии фазового сдвига (р 0) сигналы Uit и Ujy соответствуют единичному состоянию элементов 22 н 25 к опорный сигнал Ug проходит через регулятор 10 без изменений.
В том случае (см. фиг. 4),когда выходной сигнал опережает опорный (р 0), работа устройства управления вибрационным источником принципиально ничем не отличается от рассмотренного случая для «р 0. Отличие состоит лищь в том, что сигнал U22 содержит импульсы отрицательной полярности с длительноСТбю; также равной rf QoT, которые запрещают прохож. дение импульсов Uj через элемент 23. Это равнозначно вычитанию пачки импульсов из последовательности Uj. В результате колебательный процесс в вибраторе 1 замедляется и сдвиг фаз сокращается.
Предложенное устройство управления вибрационным источником в отличие от известных имеет постоянный коэффициент передачи по фазе цепи, вычисляющей фазовую ощибку.
Действительно, пусть коэффициенты пересчета делителя 9 и преобразователя 15 равны и выбраны такими, что периоду Т выходного сигнала.соответствует 2 импульсов опорного сигнала. Если То - текущее значение периода следОЁания опорных импульсов Us, то число импульсовв пачке, соответствующей сдвигу р°, равно
NT-tf2 ,
Как видно, искомый коэффициент передачи цепи обратной связи по фазе равен величине |до, определяемой только разрядностью пересчетных схем п, и не зависит, таким образом, ни от частоты колебаний, ни от уровней сравниваемых сигналов. Повыщая число разрядов п (при бинарном пересчете), можно увеличить коэффициент передачи по фазе, что, в свою очередь, повысит чувствительность системы регулирования к изменению фазы выходного сигнала, а следовательно, и точность синхронизации последнего с заданными колебаниями опорного сигнала.
Помимо высокой помехоустойчивости и точности синхронизации, предложенное устройство управления источником обладает повыщенным быстродействием при отработке фазы как в случае линейного закона изменения частоты, так и в случае нелинейного закона, когда скорость развертки частоты не постоянна и может изменяться в щироком диапазоне.
Необходимость увеличения быстродействия связана с тем, что электромеханическим преобразователям энергий,используемым в качестве вибратора, свойственна задержка
i сигнала, распространяющегося в цепи механического преобразователя. Задержка сигнала в механической цепи электрогидравлического вибратора составляетТв Ю-20 мс. Указанная задержкапри изменяющейся частоте сигнала приводит к тому, что частота колебаний на выходе вибратора отличается от частоты опорного сигнала на величину Д (t) cg, где F(t) - скорость изменения частоты опорного сигнала; задержка сигнала в вибраторе. При переменной скорости развертки частоты наличие задержки v в случае применения известных схем регулирования фазы с интегрированием ошибки (снижающим быстродействие источника) приводит к значительным фазовым искажениям сигнала. В предложенном устройстве управления вибрационным источником быстродействие увеличено путем смещения частоты управляющего сигнала на указанную величину Д F. Для этого .(на чертежах не показано) с последовательностью импульсов опорного сигнала, поступающей на вход преобразователя код-аналог, сум.мируются импульсы, частота которых пропорциональна скорости развертки частоты F(t). При этом суммированке производится со знаком, определяемым знаком скорости F(t). Применение предложенного устройства управления вибрационным источником сейсмических сигналов, отличающегося при повышенном быстродействии высокой помехоустойчивостью и точностью синхронизации сигналов по фазе,позволит увеличить глубинность исследований, повысить качество и надежность материалов, получаемых при поисковых работах на нефть и газ. Внедрение предложенного устройства управления вибрационным источником в производство принесет народному хозяйству зна чительную экономию средств, особенно в тех районах, где встречаются сложные условия бурения взрывных скважин. Так, например, по выполненным в НПО «Южморгео расчетам замена буровзрывных работ измерениями с помощью вибрационных источников с предложенным устройством управления в сейсмических партиях на землях Северного Кавказа, несмотря на увеличение .стоимости основного оборудования, составит экономию около 200 тыс. рублей в год на одну партию, оснащенную тремя источниками. Следует отметить, что экономия средств не является единственным преимуществом сейсморазведки с,применением вибрационных источников. Не менее важным положительным факторои при использовании вибрационных источников является безопасность полевых работ, резкое уменьшение ущерба, наносимого сельскохозяйственным угодьям и окружающей среде. Формула изобретения 1.Устройство управления вибрационным источником сейсмических сигналов, содержащее преобразователь код-аналог, выход которого соединен с управляющим входом вибрационного источника, генератор опорного сигнала с радиоканалом дистанционного запуска на входе и интегратор, подключенный к выходу акселерометра, установленного на опорной плите вибрационного источника, отличающееся тем, что, с целью повыщения помехоустойчивости, в него -введены цифровой регулятор фазы, делитель частоты, усилитель-ограничитель и следящий фильтр, включенные таким образом, что импульсный выход-опорного сигнала генератора подключен к первому и, через делитель частоты, ко второму входам цифрового регулятора фазы, который по выходу связан со входом преобразователя код-аналог, а по третьему входу, через усилительограничитель - с выходом следящего фильтра, сигнальный вход которого соединен с выходом интегратвра, а управляющий вход с цифровым выходом частоты генератора. 2.Устройство управления вибрационным источником сейсмических сигналов по п. 1, отличающееся тем, чтоцифровой регулятор фазы выполнен в виде схемы, содержап1ей два RS-триггера, нулевые выходы которых через первый и второй элементы 2И-НЕ подключены к первому входу, а единичные выходы через элемент ЗИ-НЕ и элемент задержки - ко второму входу третьего элемента 2И-НЕ, причем S-вход первого триггера, связанный через первый инвертор с S-входом второго триггера, R-вход второго триггера, связанный через второй инвертор с R-входом первого триггера, и третий вход элемента ЗИ-НЕ, связанный со вторым входом второго элемента 2И-НЕ, являются, соответственно, вторым, третьим и первым входами, а выход третьего элемента 2И-НЕ - выходом цифрового регулятора фазы. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3.807,525, кл. 340-15,5, 1975. 2.Патент США № 3.733,584, кл. 340-15.5, 1973. 3.Патент США № 3.739.870, кл. 181-5, 1973. 4.Патент США № 3.881.167, кл. 340-15.5, 1975.
ae.f
Риг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277034A1 |
| Широкополосный сейсмический вибратор | 1989 |
|
SU1817051A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277037A1 |
| Сейсмический вибратор | 1984 |
|
SU1495732A1 |
| Сейсмический вибратор | 1987 |
|
SU1571526A2 |
| Устройство для управления многоканальным вибростендом | 1980 |
|
SU924665A1 |
| СЕЙСМИЧЕСКИЙ ВИБРАТОР | 2001 |
|
RU2204846C1 |
| Сейсмический вибратор | 1981 |
|
SU1010582A1 |
uViO
га
It
га га
го
2Г
ro
iJn
V
tj
