Изобретение относится к измерительной технике и может использоваться для контроля углового поворота объекта и его линейных смещений при сборке, монтаже и эксплуатации изделий .
Целью изобретения является расширение функциональных возможностей путем измерения также линейных пере- мещений объекта.
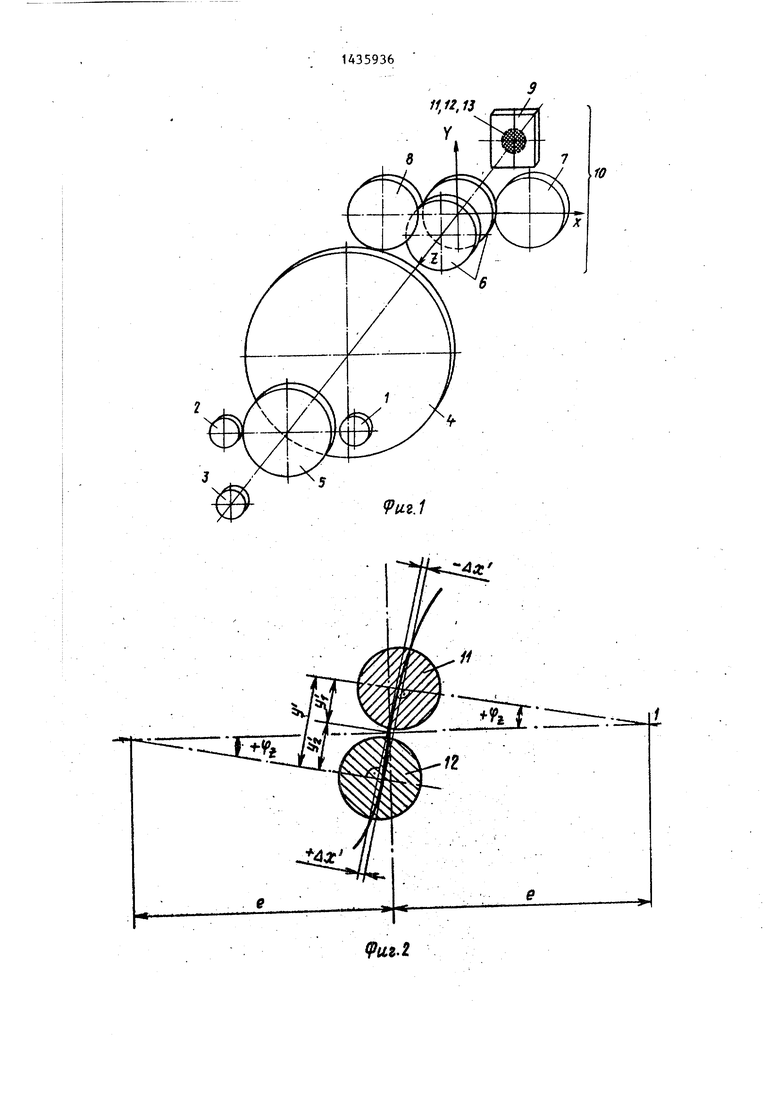
На фиг.1 приведена принципиальная схема устройства; на фиг.2 и 3 - положение изображения марок на фотоприемнике при различных смещениях конт- ролируемого объекта.
Устройство содержит три источника излучения (не показаны), три марки 1-3, объектив 4, в фокальной плоскости которого расположены две мар- ки 1 и 2, смещенные с его оптической оси на равное расстояние, и второй объектив 5, расположенный между марками 1 и 2, в фокусе которого установлена марка 3, образуюв1ие передающий узел, проекционньй объектив 6, два приемных объектива 7 и 8, позици онно-чувствительный фотоприемник 9 и блок обработки (не показан), образующие приемный узел 10, скрепляемы с контролируемым объектом.
Проекционный объектив 6 расположе между двумя приемными объективами 7 и 8, оптические оси которых параллельны оптической оси передающего узла.
На фиг.2 и 3 обозначено изображение марок на фотоприемнике от марок 1 и 2 соответственно 11 и 12 и от марки 3 ее изображение 13.
Изображение марки 3 на оптической оси передающего узла, формируемое объективами 4 и 5, совпадает с плоскостью предметов проекционного объектива 6, а его плоскость изображения совпадает с фотоприемником 9.
Объект контроля имеет возможность поворота и смещения относительно осе X, Y, Z (фиг.1) на углы и линейную величину в плоскости XY.
Устройство работает следующим образом.
Последовательно включают источник излучения, освещая соответственно марки 1-3. При подсветке марок 1 и 2 объектив 4 формирует коллимированньй пучок излучения, наклоненный к оптической оси по разные стороны от не е. Калсдый из кдллимированных пучков.
формируемых от марок 1 и 2, принимают соответствующим приемным объективом 7 и 8 и фокусируют его изображение в центре фотоприемника 9.
При подсветке марки 3 ее изображение объективами 4 и 5 строится на оптической оси передающего узла между объективом 4 и проекционным объективом 6, который проектирует ее изображение в центр фотоприемника 9. На фиг.1 показано совпадение изображений tpex марок в начальном положении.
При угловом развороте объекта изображения марок будут занимать различное пространственное положение на по- зиционно-чувствительном фотоприемнике.,
Так, например, при угловом повороте объекта на угол Ц (угол скручивания) центры изображения марок 1 и 2 смещаются относительно начального положения в противоположные стороны (фиг«2) на расстояние
У у + у
1
где у и у - текуище смещения центров изображений 11 и 12 марок 1 и 2 (фиг.1) соответственно при угл поворота qj по часовой стрелке,
у - текущее суммарное рас- стойние между центрами изображений марок. .С вьпсоДа позиционно-чувствительного фотоприемника 9 снимают сигналы,
/ I пропорциональные смещениям у, и у ,
причем сигналы снимаются в порядке, согласованном с последовательностью излучаемых импульсов светящимися марками 1 и 2, т.е. вначале , а затем у.
Угол поворота опрел ел я ют нз зависимости
V , + V L
+ cf arcsin
где е - величина смещений оптических
осей приемных объективов . 7 и 8.
Коллимационные углы поворота (- и (ц, определяют из зависимостей:
- / ,
У Уа ±ц| arctg
7,8
J II
X, + XiX .
±M u arctg nrctg T-,
2f
&
э.в
где f,„ - фокусное расстояние сим (О
мeтpIiчныx объективов 7 и 8
xj и x j - смещения центров изображений 11 и 12 марок 1 и 2 (фиг.З),
при этом сигналы, им пропорциональные, снимаются с выхода позиционно- чувствительного фотоприемника 9 аналогичным образом и в той же последовательности, как и при вычислении угла поворота с , т.е. вначале х,, а затем х.
При линейных смещениях объекта происходит смещение проекционного объектива 6 относительно изображения марки 3, формируемого передающим узлом, в результате чего объектив 6 строит ее изображение не в центре по- зиционно-чувствительного фотоприемника.
Измеряемые смещения объекта вдоль осей X и Y вычисляют из зависимости
, I I чЬ)
+х (xj - X )г-;
±У
(.IjL,-JLi)l±
У 2 2
де LI и 1/, - расстояния от главной Q плоскости проекционного объектива 6 до плоскости предмета и плоскости изображения соответственно
X и у - величина смещения изображения 13 марки 3 (фиг.З).
35
При вычислении значений линейных перемещений объекта предварительно
определяют величины х
I
и у,
у;
снимаемые с выхода позиционно-чув- ствительного фотоприемника.
10
15
20
25
Q о и
35
40
Формула изобретения Оптико-злектронное устройство для контроля положения объекта, содержащее два источника излучения, две марки и объектив, в фокальной плоскости которого установлены марки, расположенные напротив соответствующих источников по разные стороны от оптической оси объектива на равном расстоянии от нее и образующие передаю- . щий блок, и предназначенный для скрепления с контролируемым объектом прргемный блок, включающий два приемных объектива, установленные так, что их оптические оси параллельны одна другой и расположивны по разные стороны от оптической оси передающего блока на равном расстоянии от нее, каждьй из которых оптически связан с одной из марок, позиционно-чувстви- тельньй фотоприемник, установленный в фокальной плоскости приемных объективов, и блок обработки информации, электрически соединенньй с фотоприемником, отличающееся тем, что, с целью расширения функциональных возможностей путем измерения также линейных перемещений объекта, оно снабжено последовательно установленными третьим источником излучения, третьей маркой и вторым объективом, в фокальной плоскости которого установлена третья марка, образующими коллиматор, расположенный между двумя марками вдоль оптической оси передающего блока, и проекционным объективом, установленным между двумя, приемными объективами так, что его оптическая ось совмещена с оптической осью передающего блока, его плоскость изображения совпадает с фотоприемником, а его плоскость предметов - с плоскостью изображения третьей марки.
9и.г.1

| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронное устройство для контроля положения объекта | 1985 |
|
SU1307230A1 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| Оптико-электронное устройство для измерения угловых отклонений объекта | 1985 |
|
SU1359670A1 |
| Оптико-электронное устройство для измерения угловых отклонений объекта | 1987 |
|
SU1437683A2 |
| Устройство для дистанционного измерения угловых отклонений объекта | 1988 |
|
SU1566206A1 |
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| Оптико-электронное устройство для измерения угловых отклонений объекта | 1986 |
|
SU1348641A1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| Устройство для определения угла поворота изображения телескопической системы | 1989 |
|
SU1791709A1 |
| Устройство для измерения угловых отклонений объекта | 1990 |
|
SU1744454A1 |

Изобретение позволяет контроли- .ровать угловые развороты и линейные перемещения объекта. Целью изобрете- ,нкя является расширение функциональных возможностей путем измерения также линейных перемещений объекта. Последовательно формируют три пучка измерения от передающего блока, два из которых коллимированы и наклонены по разные стороны от оптической оси передающего блока, а третий пучок сходящийся, с помощью него строят изображение соответствующей ему марки на оптической оси. Пучки принимают приемным узлом, скрепляемым с объектом, состоящим, из двух прием-, ных объективов и расположенного между ними проекционного объектива, плоскость изображения проекционного объектива совпадает с фокальными плоскостями приемных объективов и в ней расположен позиционно-чувствительный фотоприемник, соединенньй с блоком обработки. Каждый из приемных объективов оптически сопряжен с одной из двух смещенных с оптической оси марок, а проекционный объектив - с третьей маркой, расположенной на оптической оси передающего блока. На фотоприемнике приемными и проекционным объективами формируют изображение трех марок, по пространственному положению которых судят об угловом и линейном перемещении объекта, 3 ил. с S (Л 4ib 00 СП со со Од
uz.2
Хз
«iг9
Л -П . /
fPu.z,3
| Устройство для измерения угловых отклонений объекта | 1984 |
|
SU1211601A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
