4 DO СП
Изобретение относится к области ; геофизических исследований и может быть использовано, например, для дистанционного измерения скорости тече- с НИИ потоков в океане и атмосфере.
Целью изобретения является повьппе- ние точности измерений и увеличение их информативности за счет создания возможности регистрации профиля ско- fO ростей объектов вдоль трассы зондирования.
Способ осуществляется следующим образом.
Исходньй пучок когерентного излу- 5 чения с йомощью объектива напра;вляет- ся на дифракционную решетку. Далее диафрагмированием вьщеляется один из дифракционных максимумов и коллими- руется, например, линзовой системой. 20 При облучении зондирующим излучением движущихся объектов, которыми могут быть взвешенные микрочастицы, всегда имеющиеся в морской воде и атмосфере, упруго рассеянное ими излучение, как 25 будет показано, приобретает времен- ные пульсации, частота которьгх про- ; порциональна их скорости в поперечном относительно оси зондирующего пучка направлении. В процессе сканирования 30 полем приема трассы зондирования осуществляется последовательная регистрация этой частоты пульсаций, по ре- зультатам которой определяют профиль ckopocтeй объектов, скоростей течений t в океане и воздушных потоков в атмосфере.
На чертеже дана схема устройства для реализации предлагаемого способа.дО
Устройство,.реализующее предлагае- мьй способ, работает, следующим образом. I
Исходное лазерное излучение нагг- равляют на объектив 1, который формирует волну излучения, направляемую на дифракционную решетку 2. Диафрагма 3, установленная перед объективом
а
и
N
:k2 Л R(V) 2аЛ(4Л2 --Х 2 f-ck2 Nexp X
X -(Ut)44A - A2)/8a2A cos
(1)
где И - длина волны лазерного излучения,
размер лазерного пучка, скорость объектов, среднее число рассеиванлдих объектов, проходящих через область, из которой принимается рассеянное излучение, средний квадрат амплитуды фототока, возниканлдего при рассеянии от одного объекта, калибровочный коэффициент, определяемый простраг ствен- ной структурой сформирован- / ного пучка.
Корреляционной функции (1) соответствует гауссовская форма спектра
SG) (2аЛ)Ч4Л2 ) -i k Nexpf-4( -)ЧЛ)2Т,, (2) сосредоточенная около частоты пульсаций Q, однозначно связанной со скоростью объектов ( о U/Л) , Л - ширина спектра.
Таким образом по измеряемой частоте - в реальном масштабе времени при помощи несложного бортового вычислительного устройства можно определить скорость объекта.
Калибровка прибора (определение Л) производится по известной скорости потока.
Вращением зеркала 5 сканируют поле приема регистратора 6-7 вдоль трассы зондирования, а рассеянное пересекающими трассу зондирования частицами 8 излучение фокусируют объективом 6.
Зная базу устройства, т.е кратчайшее расстояние от оси зондирующего пучка до оси вращающегося зеркала 5, и текущее значение угла поворота вращающегося зеркала 5, определяют мгновенное пространственное расположение зондируемого объекта 8, скорость ко4, вьоделяет первый дифрак1щонный мак-
.,,Г «.. л ,- 50 торого в данный момент и измеряется.
Исследования показали, что при изсимум, а объектив 4 формирует парал лельный пучок излучения. Поток излучения, рассеянньй движущимися объектами 8, поступает на приемную систему 5-6-7. Корреляционная функция фототока на выходе ФЭУ определяется . рассеянием излучения на движущихся частицах и может быть представлена в ввде
55
мерении скорости U относительную поди
грешность --, обусловленную турбу-(
лентностью среды, мсякно представить следующим.образом:
I /С-
ли
и
(f)(Sn,) П(-Г ГоL Го
а
и
N
:k2 Л R(V) 2аЛ(4Л2 --Х 2 f-ck2 Nexp X
X -(Ut)44A - A2)/8a2A cos
(1)
где И - длина волны лазерного излучения,
размер лазерного пучка, скорость объектов, среднее число рассеиванлдих объектов, проходящих через область, из которой принимается рассеянное излучение средний квадрат амплитуды фототока, возниканлдего при рассеянии от одного объекта калибровочный коэффициент, определяемый простраг ствен- ной структурой сформирован- / ного пучка.
Корреляционной функции (1) соответствует гауссовская форма спектра
SG) (2аЛ)Ч4Л2 ) -i k Nexpf-4( -)ЧЛ)2Т,, (2) сосредоточенная около частоты пульсаций Q, однозначно связанной со скоростью объектов ( о U/Л) , Л - ширина спектра.
Таким образом по измеряемой частоте - в реальном масштабе времени при помощи несложного бортового вычислительного устройства можно определить скорость объекта.
Калибровка прибора (определение Л) производится по известной скорости потока.
Вращением зеркала 5 сканируют поле приема регистратора 6-7 вдоль трассы зондирования, а рассеянное пересекающими трассу зондирования частицами 8 излучение фокусируют объективом 6.
Зная базу устройства, т.е кратчайшее расстояние от оси зондирующего пучка до оси вращающегося зеркала 5, и текущее значение угла поворота вращающегося зеркала 5, определяют мгновенное пространственное расположение зондируемого объекта 8, скорость ко5
мерении скорости U относительную поди
грешность --, обусловленную турбу-(
лентностью среды, мсякно представить следующим.образом:
I /С-
ли
и
(f)(Sn,) П(-Г ГоL Го
tg6
(3)
дисперсия флуктуации
показателя преломления Пд среды, - радиус корреляции
флуктуации П(; расстояние, пройденное
в турбулентной среде, |Q - половина угла между пучками.
В предлагаемой схеме исключается вклад в погрешность измерения, связанный со вторым слагаемым в (3). При одинаковых параметрах сравниваемых схем в предлагаемой схеме выигрьш в точности измерения uU/U определяется выражением
20
/Ф 1
flll).
-T(L
|Q
20
Формула изобретения Способ измерения скорости движения рассеиваюпщх объектов в прозрачных средах, включающий зондирование исследуемых объектов когерентным излучением, прием рассеянного излучения и выделение частоты его пульсаций, по которой определяют скорость объектов, отличающийся тем, что, с целью повышения точности измерений и увеличения их информативности за счет создания возможности регистрации профиля скоростей объектов вдоль трассы зондирования, формируют один Ъондирующий пучок путем облучения дифракционной решетки сферической волной когерентного излучения, вьщеления одного из дифракционных ;максимумов и последующего его колли- мирования, а полем приема сканируют вдоль трассы зондирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разделения прямого и обратного световых потоков в лазерных доплеровских измерителях скоростей и лазерный доплеровский измеритель скорости потока обратного рассеяния | 1989 |
|
SU1795371A1 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2024 |
|
RU2823912C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Способ определения размеров броуновских частиц | 1986 |
|
SU1402850A1 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2022 |
|
RU2791833C1 |
| Способ дистанционного измерения концентрации водорода в атмосфере | 1987 |
|
SU1515896A1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2785768C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2793613C1 |
| ЛАЗЕРНЫЙ КОНФОКАЛЬНЫЙ ДВУХВОЛНОВЫЙ РЕТИНОТОМОГРАФ С ДЕВИАЦИЕЙ ЧАСТОТЫ | 2007 |
|
RU2328208C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
Изобретение относится к геофизике и позволяет повысить точность и информативность измерений скорости движения рассеиваю1чих объектов. Исходное лазерное излучение направляют на объектив 1, который формирует излучение, попадающее на дифракционную решетку 2. Диафрагма 3 выделяет первый дифракционный максимум, а объектив 4 формирует зондирующий пучок. Излучение, рассеянное движущимися объектами 8, регистрируется приемной системой 5, 6, 7, содержащей устрой- § ство сканирования 5. 1 ил. (Л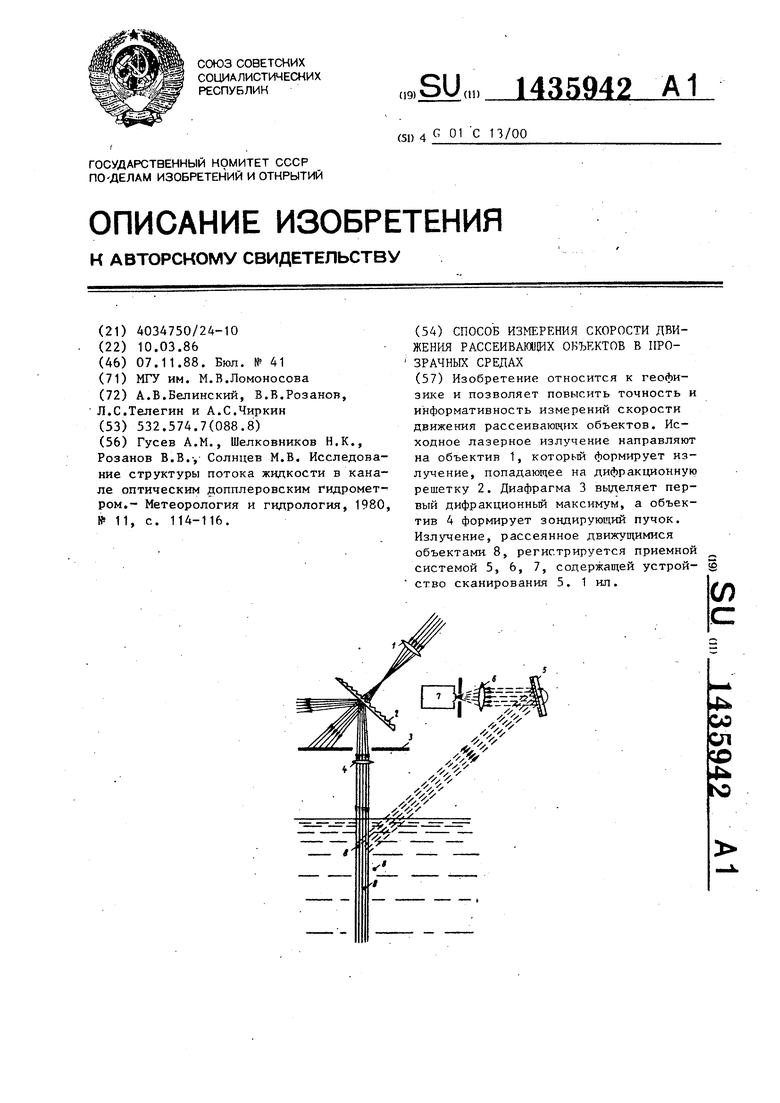
| Гусев A.M., Шелковников Н.К., Розанов В.В.-, Солнцев М.В | |||
| Исследование структуры потока жидкости в канале оптическим допплеровским гидромет- ром.- Метеорология и гидрология, 1980, № 11, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
