1 .14
Изобретение относится к. гесфнзкчес КИМ приборам, предна; наченным для сейсмических наблюденийд и может быть использовано при создании сейсмометров, устанавливаемых в трур,нодоступ- ных местах, например скважинах.
Целью изобретения является ПОБЬШВ- ние точности и надежности стабилкза- ции маятника сейсмометра и уменьЕте™ ние габаритов устройства.
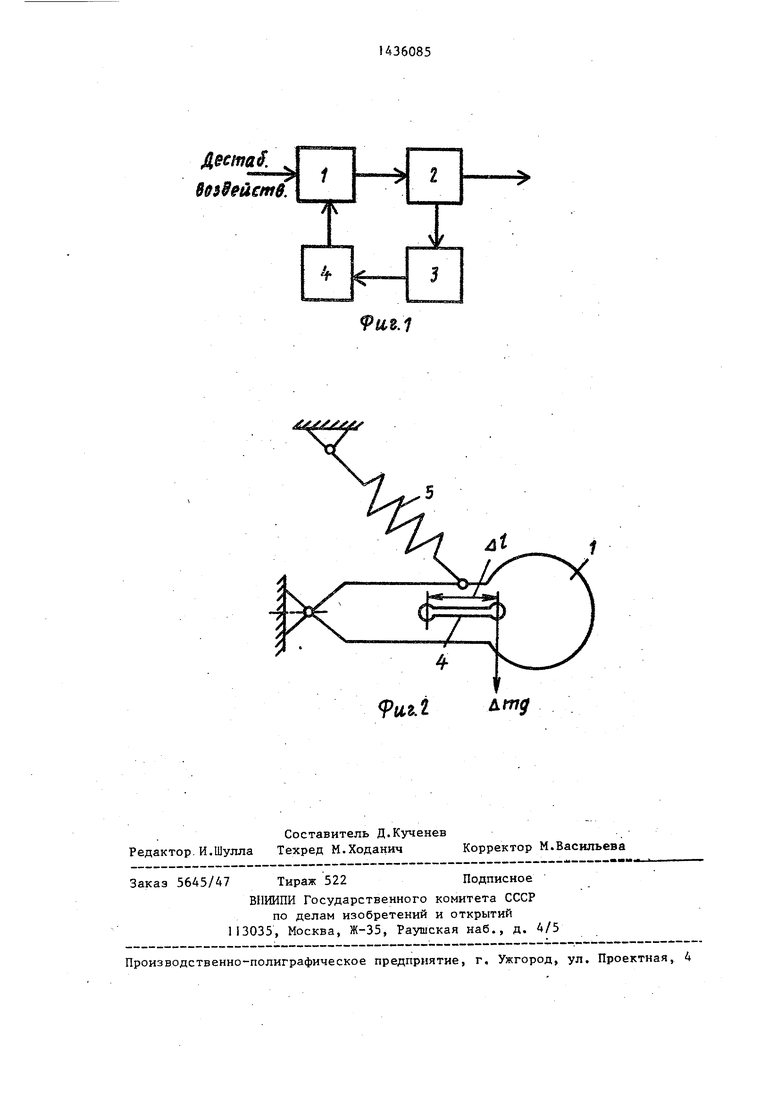
На фиг,1 показана блокг-схема предлагаемого устройства; на фвг.2 - куяо яометрический преобразователь при установка.
Устройство стабилизация положения: маятника сейсмометра. (фиг.) Ьодержк йаятнйк 11 параметрический .преобра- зователь 2 перемещения маятника сейс
5
0
суммарного момента сил, действующего на маятник на величину drag1 (фиг.2), что приводит к его установке в нуле вое положение. Ввиду интегрирующих свойств кулонометрического преобразователя статическая ошибка стабилиза- цкк системы равна нулю.
Величина тока, протекающего через кулонометрический преобразователь, за- вависит от вьжодного сигнала датчика положения маятника. Направление тока выбирается таким, чтобы возникающий момент компенсировал дрейф положения равновесия маятника под воздействием дестабилизирующих факторов.
Таки1-5 образом, кулонометрический преобразователь в предлагаемом уст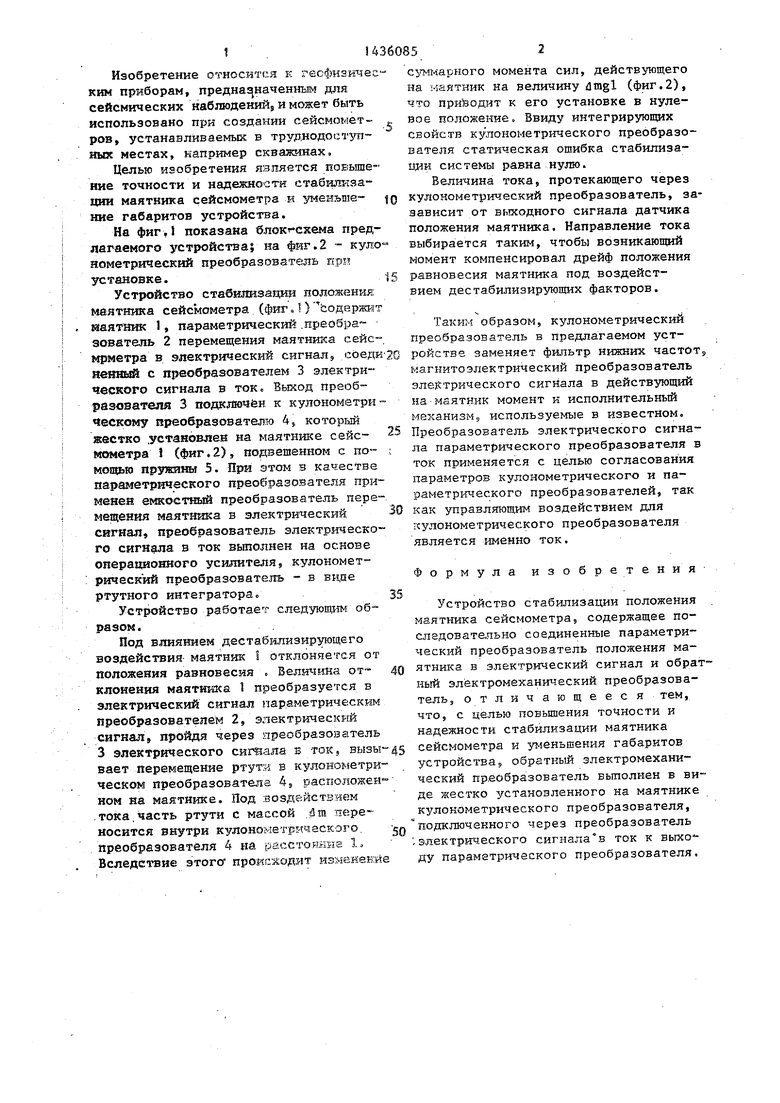
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмометр | 1977 |
|
SU651283A1 |
| Длиннопериодный вертикальный сейсмометр | 1982 |
|
SU1094002A1 |
| Устройство для автоматической стабилизации нулевого положения маятника | 1979 |
|
SU890307A1 |
| Электронный сейсмометр | 1987 |
|
SU1518816A1 |
| Трехкомпонентный самоустанавливающийся сейсмоприемник | 1988 |
|
SU1578670A1 |
| Устройство для компенсации искажений в электродинамических сейсмометрах | 1989 |
|
SU1651257A1 |
| СЕЙСМИЧЕСКИЙ ПРИБОР | 1995 |
|
RU2097792C1 |
| Сейсмометр | 1984 |
|
SU1267319A1 |
| Электронный сейсмометр | 1977 |
|
SU662889A1 |
| Способ коррекции движения маятника вертикального сейсмометра | 1978 |
|
SU779961A1 |
Изобретение относится к геофизическим приборам, предназначенным для сейсмических наблюдений, и может быть использовано при создании сейсмометров, устанавливаемых в труднодоступных местах, например, скважинах. Цель - повышение точности и надежности стабилизации маятника сейсмометра и уменьшение габаритов устройства за счет выполнения обратного электромеханического преобразователя в виде кулонометрического преобразователя, жестко установленного на маятнике. Устройство стабилизации § положения маятника сейсмометра включает маятник, подвешенный с помощью пружины, параметрический преобразователь перемещения маятника в электрический сигнал, преобразователь элект- а рического сигнала в ток, кулономет- рический преобразователь. 2 ил. (Л
25
мрметра в электрический сигнал, соеди-20 ройстве заменяет фильтр нижних частота
магнитоэлектрический преобразователь электрического сигнала в действующий намаятник момент и исполнительный механизмS используемые в известном. Преобразователь электрического сигнала параметрического преобразователя в ток применяется с целью согласования параметров кулонометрического и па раметрического преобразователей, так как управляющим воздействием для кулонометрического преобразователя является именно ток.
с преобразователем 3 электрического сигнала в ток. Выход преобразователя 3 подключён к кулонометри вескому преобразователю 4, который жестко установлен на маятнике сейсмометра 1 (фиг.2), подвешенном с по™ ; мопцэю пружяшл 5. При этом S качестве параметрического преобразователя применен ешсостный преобразователь пере-. мещенйя маятника в электрический 30 Сигнал, преобразователь электрического сигнада в ток выполнен на основе операционного усилителя, кулономет рический преобразователь - в внае ртутного интегратора. . 35
Устройство работает следующим: образом.
Под влиянием дестабилизирующего воздействия- маятник 1 отклоняется от положения равновесия . Величина от- 40 клонення маятника 1 преобразуется в электрический сигнал параметрическим преобразователем 2, электрический сигналJ пройдя через преобразователь 3 электрического сигнала в тоК; вает перемещение ртут:и: в кулоноыетри- ческом преобразователе 4 расположен ном на маятнике. Под :воэд€;йств:яем
.тока.часть ртути с массой йт пере- носится внутри кулонойетрического. Q
.преобразователя 4 на рассто.нйна 1о Вследствие этого прОйс- 4одит из:мгнеЕ:йе
Формула изобретенияУстройство стабилизации положения маятника сейсмометра, содержащее последовательно соединенные параметрический преобразователь положения маятника в электрический сигнал и обрат- электромеханический преобразователь, отличающееся тем, что, с целью повьппения точности и надежности стабилизации маятника сейсмометра к уменьшения габаритов ус тройства 5 обрати.й электромеханический преобразователь вьтолнен в виде жестко установленного на маятнике кулонометрического преобразователя, подключенного через преобразователь электрического сигнала в ток к выхо ду параметрического преобразователя.
25
; . 30
Формула изобретенияУстройство стабилизации положения маятника сейсмометра, содержащее последовательно соединенные параметрический преобразователь положения маятника в электрический сигнал и обра электромеханический преобразователь, отличающееся тем, что, с целью повьппения точности и надежности стабилизации маятника сейсмометра к уменьшения габаритов ус тройства 5 обрати.й электромеханический преобразователь вьтолнен в виде жестко установленного на маятнике кулонометрического преобразователя, подключенного через преобразователь электрического сигнала в ток к выхо ду параметрического преобразователя.
jl Aifjf A
9iit.l
mg
| Устройство для дистанционной автоматическойпОдСТРОйКи НулЕВОгО пОлОжЕНия МАяТНиКАСЕйСМОМЕТРА | 1979 |
|
SU842674A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рыбкин и.с | |||
| Автоматическая система стабилизации и компенсации нулевого положения маятника сейсмометра | |||
| Инструментальное изучение сейсмических колебаний | |||
| Сейсмические приборы, вьт.16 | |||
| -М.: Наука, 1984, с.121-124. | |||
