дов на параметры отрицательных эквивалентов.
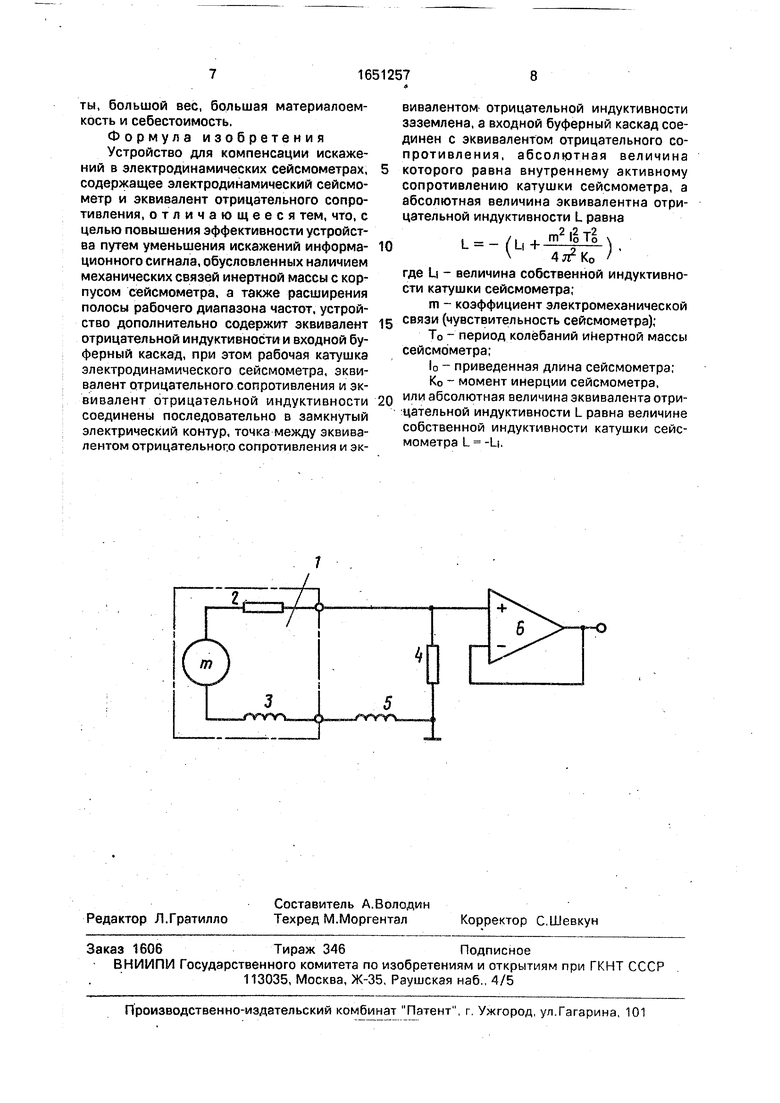
При этом рабочая катушка 1 последовательно соединена с эквивалентами отрицательного сопротивления А и отрицательной индуктивности 5 в замкнутый электрический контур, заземленный точкой между этими эквивалентами, а входной буферный каскад соединен с эквивалентом отрицательного сопротивления 4.
Искажения информационного сигнала обусловлены наличием механических и электромеханических связей инертной массы с корпусом сейсмометра, которые в определенной степени вовлекают в колебательный процесс и инертную массу сейсмометра,То есть собственные колебания инертной массы - это те искажения, которые необходимо скомпенсировать. Для этого имеются два варианта, Первый - метод полного затухания, можно вести абсолютно-жесткое электродинамическое демпфирование, при котором инертная масса сейсмометра будет колебаться синхронно с корпусом сейсмоприемника. При этом реакция такого демпфера будет полностью соответствовать параметрам колебательного процесса. Второй - метод компенсации механических связей можно на время регистрации колебательного процесса разорвать механическую связь, электродинамически скомпенсировав действие пружины на инертную массу таким образом, чтобы инертная масса не вовлекалась в колебательный процесс, а оставалась в покое, Оба эти варианта компенсации искажений могут быть реализованы с помощью устройства.
Устройство работает следующим образом.
При возникновении сейсмических колебаний через замкнутый контур - катушка 1 сейсмоприемника с сопротивлением 2 и индуктивностью 3, эквивалент 4 отрицательного сопротивления и эквивалент 5 отрицательной индуктивности, начинает циркулировать ток I, Если компенсация искажений реализуется методом полного затухания, то благодаря тому, что суммарное электрическое сопротивление замкнутого контура равно нулю, величина и фаза тока I оказываются такими, что инертная масса сейсмоприемника начинает подвергаться бесконечно большому электродинамическому демпфированию, которое вовлекает инертную массу сейсмоприемника в движение, синхронное движению корпуса сейсмоприемника. В этом случае ток I, a следовательно, и информационный сигнал U IR, снимаемый с эквивалента отрицательного сопротивления R. пропорциональны силе, действующей на инертную массу, совершающей колебания, синхронные колебаниям почвы, а следовательно, эти же параметры I и U оказываются пропорциональными ускорению смещения почвы, Если же компенсация искажений реализуется методом компенсации механических связей, то в этом случае суммарное электрическое сопротивление замкнутого контура
является отрицательным и индуктивным. Величина этой отрицательной индуктивности такова, что ее механический аналог имеет жесткость Котр, отрицательную по величине, но равную по модулю жесткости
пружины инертной массы сейсмоприемника. А это означает, что ток I, протекающий по замкнутому контуру, воздействует на инертную массу сейсмоприемника с силой, равной и противоположно направленной
силе воздействия со стороны упругих пружин, т.е. эти две силы при колебаниях исследуемого объекта взаимно компенсируют друг друга и поэтому инертная масса не испытывает на себе никаких силовых воздействий. Из этого следует, что перемещения (колебания) корпуса сейсмоприемника относительно инертной массы полностью соответствуют колебаниям исследуемого объекта.
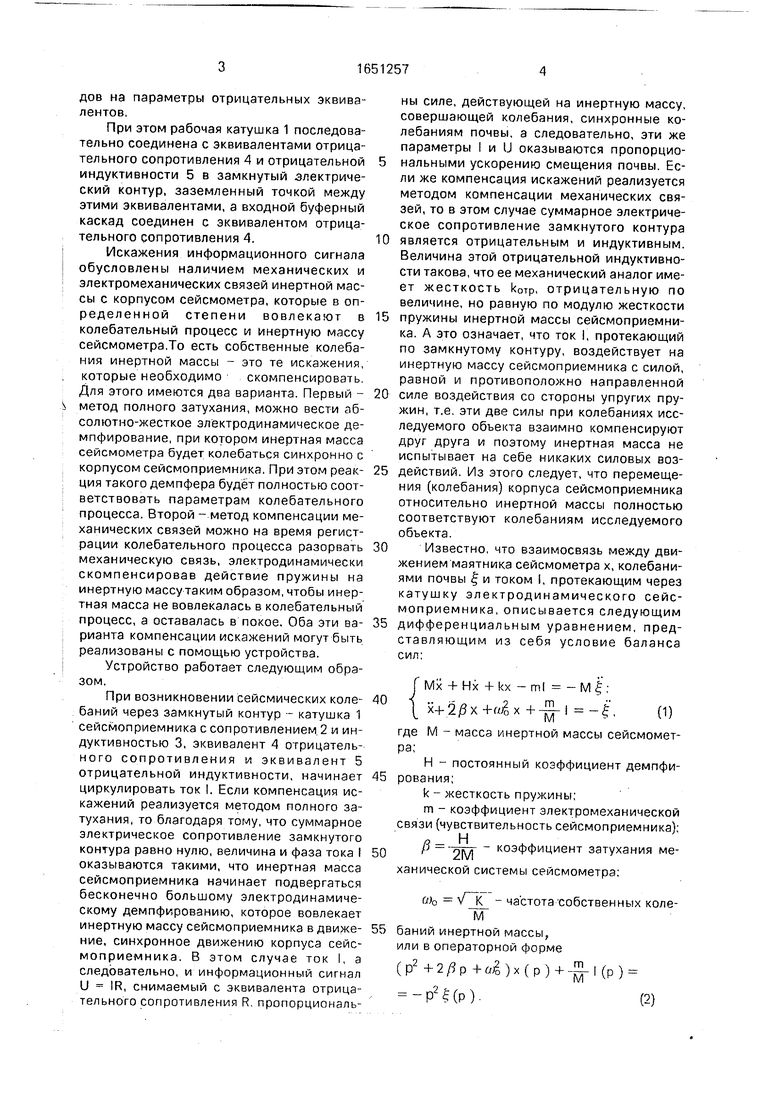
Известно, что взаимосвязь между движением маятника сейсмометра х, колебаниями почвы Ј и током I, протекающим через катушку электродинамического сейсмоприемника, описывается следующим
дифференциальным уравнением, представляющим из себя условие баланса сил:
Мх + Нх +kx - ml -м|; v x+2j8x+«Јx +--I -j.(1)
где М - масса инертной массы сейсмометра;
Н - постоянный коэффициент демпфи- рования;
k - жесткость пружины; m - коэффициент электромеханической связи (чувствительность сейсмоприемника); Н
коэффициент затухания ме 2М
ханической системы сейсмометра;
а)° V К частота собственных колеМ
баний инертной массы, или в операторной форме
(p2+2/SP+)x(p)(P)- -р2Ј(р)(2)
Откуда смещение катушки х(р) и велины электродвижущей силы Е(р) равны:
-Р КР)
х(р) +
m
MZ(p) E(p) mpx(p)
mp3g(p)
p +twi
р2+ +Ш1р7}р+
Основное условие метода полного затухания - равенство нулю полного импендан- са электрической цепи, т.е.
Z(p) Ri + pU + R + pL 0. (4)
В этом случае коэффициент электроди намического затухания 2h m2/MZ(p) будет стремиться к бесконечности, а смещение массы сейсмометра х(р) относительно корпуса и электродвижущая сила Е(р) стремится к нулю при Z(p) - 0.
Ток, протекающий через катушку сейсмометра, равен
,Грч- Е(р) Мр|2(р) 1 v Р ) г ( р )m (Ь)
Ток 1(р), протекающий через эквивалент отрицательного сопротивления R, будет создавать на нем падение напряжения U, равное
и(р) -,(р)
Const р2 Ј ( р ) .(6)
Таким образом, информационный сигнал U(p) оказывается прямо пропорциональным ускорению смещения почвы без искажений,т.е. U ( р )-ф2 Ј( р ) илии(О f(t).
При работе методом компенсации механических связей необходимо, чтобы сумма членов Нх + Нх + ml должна быть равна нулю, т.е.
. Нх + Кх + ml 0;
2 8x+ojgx+-g-l 0 .(7)
В этом случае уравнение (1) принимает вид
Мх - М |,
откуда x(t) -Ј(t), т.е. передача информации Ј(t) (т.)происходит без искажения.
Из условия (7) определяется,каким должен быть полный электрический импенданс Z(p) замкнутого контура (фиг.1):
-
Z (р) R + Ri + pL + pU m2T20
P .
4л2 М
Отсюда получают значения для параметров отрицательных эквивалентов, обеспечивающих компенсацию искажений
методом компенсации механических связей:
R -Ri
L - Li m2T2o
(8)
4л2М
Если же в паспорте маятникового сейсмометра приводятся не масса маятника, а его приведенная длина to и момент инерции .JQ К0 , то формула (8) для этих параметров принимает следующий вид:
15
20
25
30
35
40
45
50
55
)
-()- (9)
Техническая эффективность изобретения заключается в более полном соответствии выходного информационного сигнала с параметрами колебаний исследуемого объекта (почва, корпус механизма и т.п.) и смещении нижней граничной частоты рабочего диапазона частот за пределы собственной резонансной частоты инертной массы сейсмометра, что приводит к расширению рабочего диапазона в область низких частот.
Кроме того, устройство, работающее в режиме полного затухания-, не только выпрямляет АЧХ сейсмометра, но еще и компенсирует нелинейные искажения, присущие любой реальной механической колебательной системе. Обусловлено это тем, что инертная масса совершает колебания синхронно с корпусом сейсмометра, т.е. относительно корпуса инертная масса неподвижна (отклонения от положения равновесия столь малы, что ими можно пренебречь), а следовательно, и пружина не подвергается деформации. А нелинейные искажения колебательных систем проявля-. ются только при больших деформациях пру- жин, т.е. при больших отклонениях инертной массы от положения равновесия. Существенно также, что для регистрации даже самых крупных землетрясений может быть использован любой, даже самый маленький, сейсмоприемник, так как отклонения инертной массы от положения равновесия при любых воздействиях ничтожны. Здесь даже более выгодно использовать именно малый, а не большой сейсмоприемник с малой инертной массой, так как в этом случае требуется отрицательные эквиваленты меньшей мощности. Роль инертной массы может выполнять легкая подвижная катушка сейсмоприемника в отличие от стандартных требований к сейсмометру для регистрации крупных эемле- тресений: большая инертная масса, большая приведенная длина сейсмического маятника и, как следствие, большие габариты, большой вес, большая материалоемкость и себестоимость.
Формула изобретения Устройство для компенсации искажений в электродинамических сейсмометрах, содержащее электродинамический сейсмометр и эквивалент отрицательного сопротивления, отличающееся тем, что, с целью повышения эффективности устройства путем уменьшения искажений информационного сигнала,обусловленных наличием механических связей инертной массы с корпусом сейсмометра, а также расширения полосы рабочего диапазона частот, устройство дополнительно содержит эквивалент отрицательной индуктивности и входной буферный каскад, при этом рабочая катушка электродинамического сейсмометра, эквивалент отрицательного сопротивления и эквивалент отрицательной индуктивности соединены последовательно в замкнутый электрический контур, точка между эквивалентом отрицательного сопротивления и эк
вивалентом отрицательной индуктивности заземлена, а входной буферный каскад соединен с эквивалентом отрицательного сопротивления, абсолютная величина которого равна внутреннему активному сопротивлению катушки сейсмометра, а абсолютная величина эквивалентна отрицательной индуктивности L равна
L /Ll+jniflb
л к I
4л2 Ко
где U - величина собственной индуктивности катушки сейсмометра;
m - коэффициент электромеханической 5 связи (чувствительность сейсмометра);
То - период колебаний инертной массы сейсмометра;
1о - приведенная длина сейсмометра; Ко - момент инерции сейсмометра, Q или абсолютная величина эквивалента отрицательной индуктивности L равна величине собственной индуктивности катушки сейсмометра L -Li.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации искажений электродинамического сейсмометра | 1990 |
|
SU1822995A1 |
| Электродинамический преобразовательный блок сейсмоприемника ускорений | 1989 |
|
SU1720037A1 |
| СПОСОБ ПРОВЕРКИ ЭЛЕКТРОДИНАМИЧЕСКИХ СЕЙСМОПРИЕМНИКОВ | 1992 |
|
RU2031418C1 |
| Способ определения коэффициента преобразования электродинамического сейсмоприемника с шунтом | 1988 |
|
SU1569762A1 |
| Способ измерения магнитной индукции постоянных магнитов | 1989 |
|
SU1755227A1 |
| Способ генераторной калибровки электродинамических сейсмоприемников | 1989 |
|
SU1651255A1 |
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| СЕЙСМОПРИЕМНОЕ УСТРОЙСТВО | 1992 |
|
RU2054700C1 |
| Длиннопериодный вертикальный сейсмометр | 1982 |
|
SU1094002A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
Изобретение относится к сейсмометрии, а именно к устройству для компенсации искажений в электродинамических сейсмометрах, и может быть использовано для регистрации и измерений в сейсмологии, сейсморазведке и виброметрии Цель изобретения - повышение эффективности устройства путем уменьшения искажений информационного сигнала, обусловленных Изобретение относится к сейсмометрии и может быть использовано для регистрации и измерений в сейсмологии, сейсморазведке и виброметрии. Цель изобретения-повышение эффективности устройства путем уменьшения искажений информационного сигнала, обусловленных наличием механических связей инертной массы с корпусом сейсмометра, а также расширение полосы рабочего диапазона частот наличием механических связей инертной массы с корпусом сейсмометра, а также расширения полосы рабочего диапазона частот Устройство содержит эквиваленты отрицательной индуктивности и отрицательного сопротивления, которые совместно с рабочей катушкой электродинамического сейсмометра образуют замкнутый электрический контур с точкой заземления между эквивалентом отрицательного сопротивления и эквивалентом отрицательной индуктивности При этом абсолютную величину эквивалента отрицательной индуктивности выбирают из условия L - -(Li+m2/k) -(1 +т2То2/(4 л2 М)) - U+m2l02T02/(4 л2 Ко),где m - коэффициент электромеханической связи (чувствительность сейсмоприемника), к - жесткость пружины. То - период колебаний инертной массы сейсмометра М - масса инертной массы сейсмометра, 10 - приведенная длина сейсмического маятника, К0 - момент инерции сейсмического маятника Информационный сигнал снимают с эквивалента отрицательного сопротивления 1 ил На чертеже представлена схема предлагаемого устройства Устройство состоит из электродинамического сейсмометра с рабочей катушкой 1 с внутренним сопротивлением RI 2 и индуктивностью L 3 эквивалента 4 отрицательного сопротивления R,эквивалента 5 отрицательной индуктивности L и входного буферного каскада 6, предназначенного для устранения влияний последующих каскасл с ON СЛ N) СЛ VJ
| МАГНИТОЭЛЕКТРИЧЕСКИЙ СЕЙСМИЧЕСКИЙ ВИБРОДАТЧИК | 0 |
|
SU203946A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Запальная свеча для двигателей | 1924 |
|
SU1967A1 |
| Электронный сейсмометр | 1977 |
|
SU662889A1 |
