-
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля состояния подшипников | 1986 |
|
SU1401320A1 |
| Устройство для измерения динамических параметров вращающихся объектов | 1983 |
|
SU1201676A1 |
| Устройство для контроля технологических параметров в скважине и защиты погружного электродвигателя от аномальных режимов | 1987 |
|
SU1472655A1 |
| Реле тока | 1979 |
|
SU815821A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1971 |
|
SU311152A1 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА РЕАКТИВНОЙ СОСТАВЛЯЮЩЕЙ ПЕРЕМЕННОГО ТОКА | 2017 |
|
RU2673335C2 |
| УСТРОЙСТВО МОНИТОРИНГА И ВЫРАВНИВАНИЯ СТЕПЕНИ ЗАРЯЖЕННОСТИ АККУМУЛЯТОРОВ БЛОКА АКБ | 2022 |
|
RU2792305C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| Устройство для контроля светосигнальных ламп | 1987 |
|
SU1418786A1 |
| Датчик постоянного и переменного тока | 1985 |
|
SU1265628A1 |
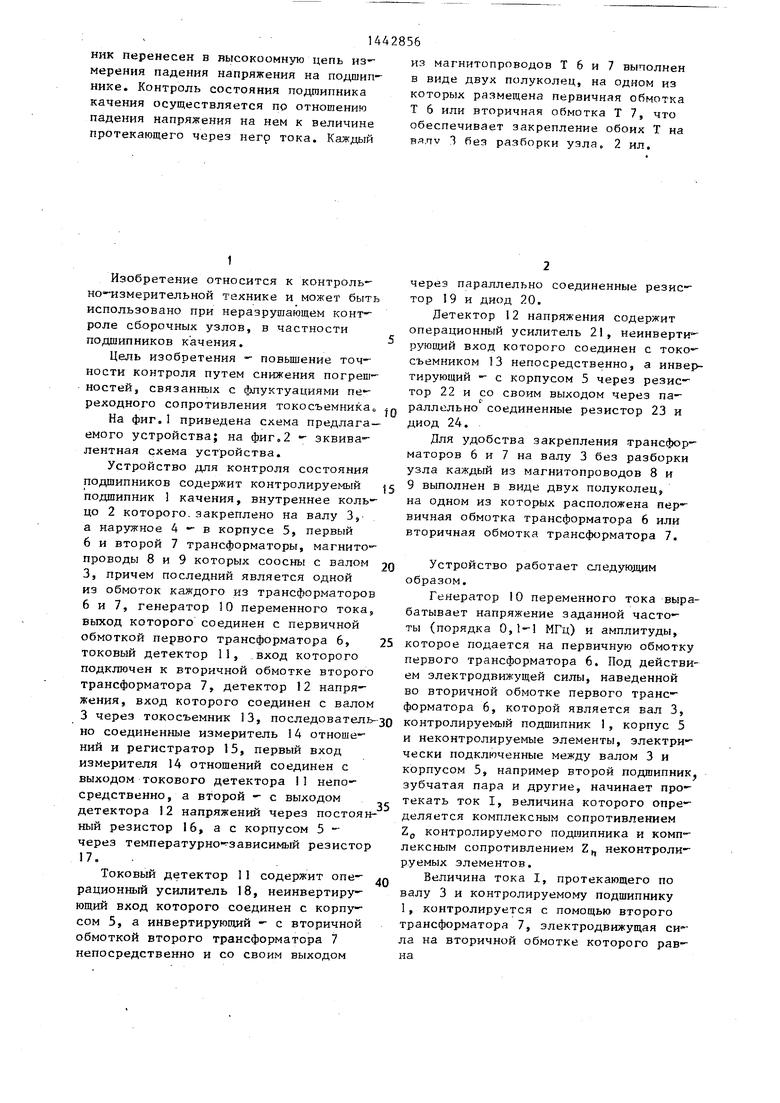
Изобретение относится к конт- рольно- измерительной технике и может быть использовано при неразрушающем контроле сборочных узлов, в частности подшипников качения. Цель - повьипение точности контроля путем снижения по грешностей, связанных с флуктуациями переходного сопротивления токосъем- г ника. От генератора переменного тока 10 через первый трансформатор (Т) 6 в вале 3 и контролируемом подшипнике 1 индуцируется ток. Величина тока контролируется Т 7 и токовым детек тором (Д) И. Падение напряжения на контролируемом подшипнике I снимает ся с помощью токосъемника 13 и подается на вход Д 12 напряжения. На первый вход измерителя 14 отношения подается выходное напряжение токового Д П непосредственно, а на второй выходное напряжение Д 12 напряжения через температурно« зависимый дели тель. Измеритель 14 отношения форми рует цифровой эквивалент отношения падения напряжения на подшипнике к протекающему через него току и передает его на регистратор 15. Токосъем- 5 S с &
ttT lifar
Фю.}
144
ник перенесен в высокоомную цепь из-- мерения падения напряжения на подшип- инке. Контроль состояния подшипника качения осуществляется по отношению падения напряжения на нем к величине протекающего через негр тока. Каждый
1
Изобретение относится к контроль- но--измерительной технике и может быть использовано при наразрушающем конт- роле сборочных узлов, в частности подшипников качения.
Цель изобретения повьщ1ение точ- ности контроля путем снижения погреш-- ностей, связанных с флуктуациями пе--- реходного сопротивления токосъемника
На фиг.1 приведена схема предлагаемого устройства; на фиг.2 эквива-- лентная схема устройства.
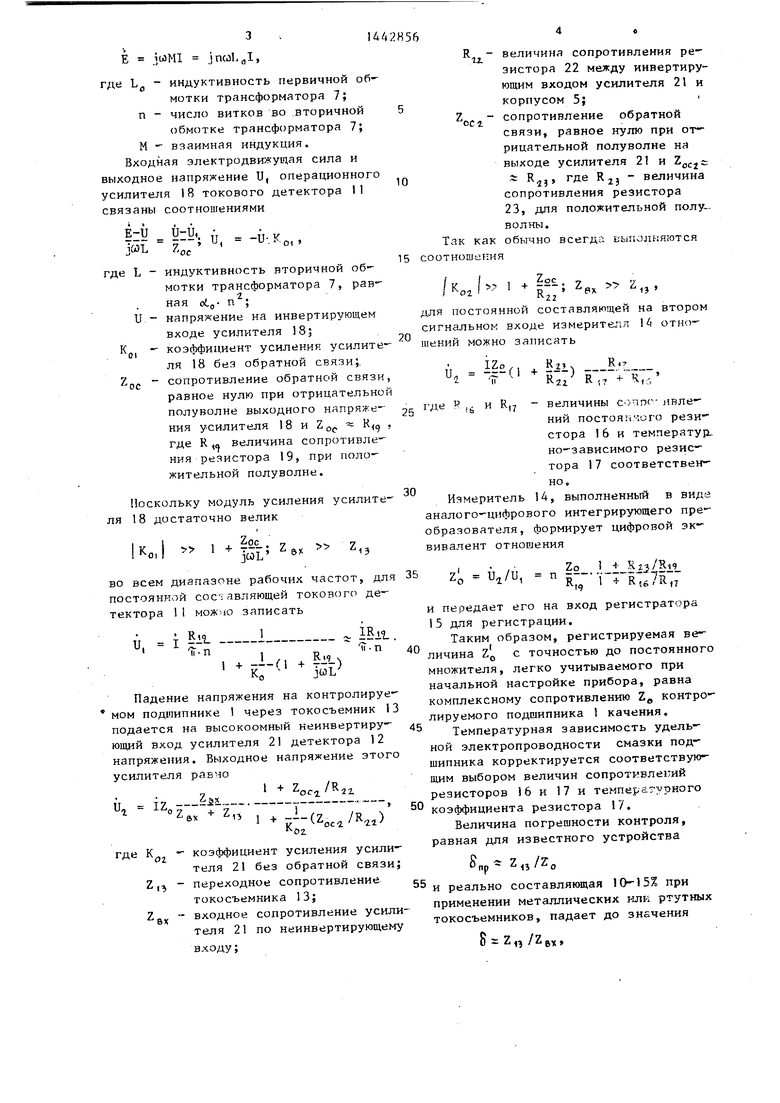
Устройство для контроля состояния подшипников содержит контролируемый подшипник I качения, внутреннее кольцо 2 которого.закреплено на валу 3, а наружное 4 - в корпусе 5, первый 6 и второй 7 трансформаторы, магнито-- проводы 8 и 9 которых соосны с валом 3, причем последний является одной из обмоток каждого из трансформаторов 6 и 7, генератор 10 переменного тока, выход которого соединен с первичной обмоткой первого трансформатора 6, токовый детектор 11, вход которого подключен к вторичной обмотке второго трансформатора 7, детектор 12 напря- Женин, вход которого соединен с валом 3 через токосъемник 13, последователь но соединенные измеритель I4 отношений и регистратор 15, первый вход измерителя 14 отношений соединен с выходом токового детектора П непосредственно, а второй - с выходом детектора 12 напряжений через постоян ный резистор 16, ас корпусом 5 - через температурно зависимый резистор 17.
Токовый детектор 11 содержит one- рационный усилитель 18, неинвертиру- ющий вход которого соединен с корпусом 5, а инвертирующий - с вторичной обмоткой второго трансформатора 7 непосредственно и со своим выходом
из магнитопроводов Т 6 и 7 выполнен в виде двух полуколец, на одном из которых размещена первичная обмотка Т 6 или вторичная обмотка Т 7, что обеспечивает закрепление обоих Т на вялу 3 без разборки узла. 2 ил.
Ш
20
|5 25 зо
Q
5
через параллельно соединенные резистор 19 н диод 20.
Детектор 12 напряжения содержит операционный усилитель 21, неинверти рующий вход которого соединен с токосъемником 13 непосредственно, а инвертирующий - с корпусом 5 через резистор 22 и со своим выходом через параллельно соединенные резистор 23 и диод 24.
Для удобства закрепления трансформаторов 6 и 7 на валу 3 без разборки узла каждый из магнитопроводов 8 и 9 выполнен в виде двух полуколец, на одном из которых расположена первичная обмотка трансформатора 6 или вторичная обмотка трансформатора 7.
Устройство работает следуюдцим образом.
Генератор 10 переменного тока вырабатывает напряжение заданной частоты (порядка 0,1-1 МГц) и амплитуды, которое подается на первичную обмотку первого трансформатора 6. Под действием электродвижущей силы, наведенной во вторичной обмотке первого трансформатора 6, которой является вал 3, контролируемый подшипник 1, корпус 5 и неконтролируемые элементы, электрически подключенные между валом 3 и корпусом 5, например второй подшипник зубчатая пара и другие, начинает протекать ток I, величина которого определяется комплексным сопротивлением Zp контролируемого подшипника и комплексным сопротивлением Z неконтролируемых элементов.
Величина тока I, протекающего по валу 3 и контролируемому подшипнику 1, контролируется с помощью второго трансформатора 7, электродвижущая си ла на вторичной обмотке которого равна
Е где L
i(JMI jnULfll,
индуктивность первичной об мотки трансформатора 7; п - число витков во вторичной обмотке трансформатора 7; М - взаимная индукция. Входная электродвижущая сила и выходное напряжение U, операционного усилителя 18 токового детектора II связаны соотношениями
У:У . и -и- V
j, и, и. . о, ,
ОС
де L - индуктивность вторичной об- мотки трансформатора 7, рав2.
и,.
ОС
ная п
напряжение на инвертирующем входе усилителя 18; коэффициент усиления усилителя 18 бея обратной связи;, сопротивление обратной связи, равное нулю при отрицательной полуволне выходного напряжения усилителя 18 и Z К,д . где R ,а величина сопротивления резистора 19, при положительной полуволне.
Поскольку модуль усиления усилитея 18 достаточно велик
Zoc
К
01
У 1 +
V
IUL
13
во всем диапазоне рабочих частот, для 35 постоянной соc i являющей токового детектора 1
и,
Падение напряжения на контролируемом подшипнике 1 через токосъемник 13 подается на высокоомный неинвертиру- ющий вход усилителя 2 детектора 12 напряжения. Выходное напряжение этого усилителя равно
г
IZ,
ог
вх
де К, - коэффициент усиления усилителя 21 без обратной связи; переходное сопротивление токосъемника 13; входное сопротивление усилителя 21 по неинвертирующему входу;
ОС г
величина сопротивления резистора 22 между инвертирующим входом усилителя 21 и корпусом 5;
сопротивление обратной связи, равное нулю при отрицательной полуволне на выходе усилителя 21 и
2: R
ti
сс, где Rjj величина
Так как соотношения
сопротивления резистора 23, для положительной полуволны, обычно всегда выполняются
/ Ко.
1 +
Zoc „
р
Z
22
ДЛЯ ПОСТОЯННОЙ составляющей сигнальном входе измерителя шений можно записать
1
на 1А
втором о т но-
г
i|(,
V.2i R. ,,
25
30
где
р
&
И R
17
величины coripc - явлений постояимого резистора 1 6 и температур. но-зависимого резистора 17 соответственно.
Измеритель 14, выполненный в виде аналого-цифрового интегрирующего преобразователя, формирует цифровой эквивалент отношения
i,/u, . п ..Li-|i «i Л|„ 1 tV 56 , л (
19
ЧГ
40
45
35
И передает его на вход регистратора 15 для регистрации.
Таким образом, регистрируемая величина Zj5 с точностью до постоянног множителя, легко учитываемого при начальной настройке прибора, равна комплексному сопротивлению Z контролируемого подшипника 1 качения.
Температурная зависимость удельной электропроводности смазки подшипника корректируется соответствующим выбором величин сопротивлений резисторов 16 и 17 и температурного ° коэффициента резистора 17.
Величина погрешности контроля, равная для известного устройства
пр Z,j
/2.
И реально составлякнцая 10-15% при применении металлических клк ртутных токосъемников, падает до значения
О Z, /Zgx
аг. г
| Устройство для контроля состояния подшипников | 1986 |
|
SU1401320A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
