4
4iib 4ib
HauHdijкацию
Изобретение относится к автомати- управлению и может быть ис- пюяьзовано для стабилизации положения объектов, например в гироскопи- Ч1ёских системах.
Целью изобретения является повьше иие надежности системы.
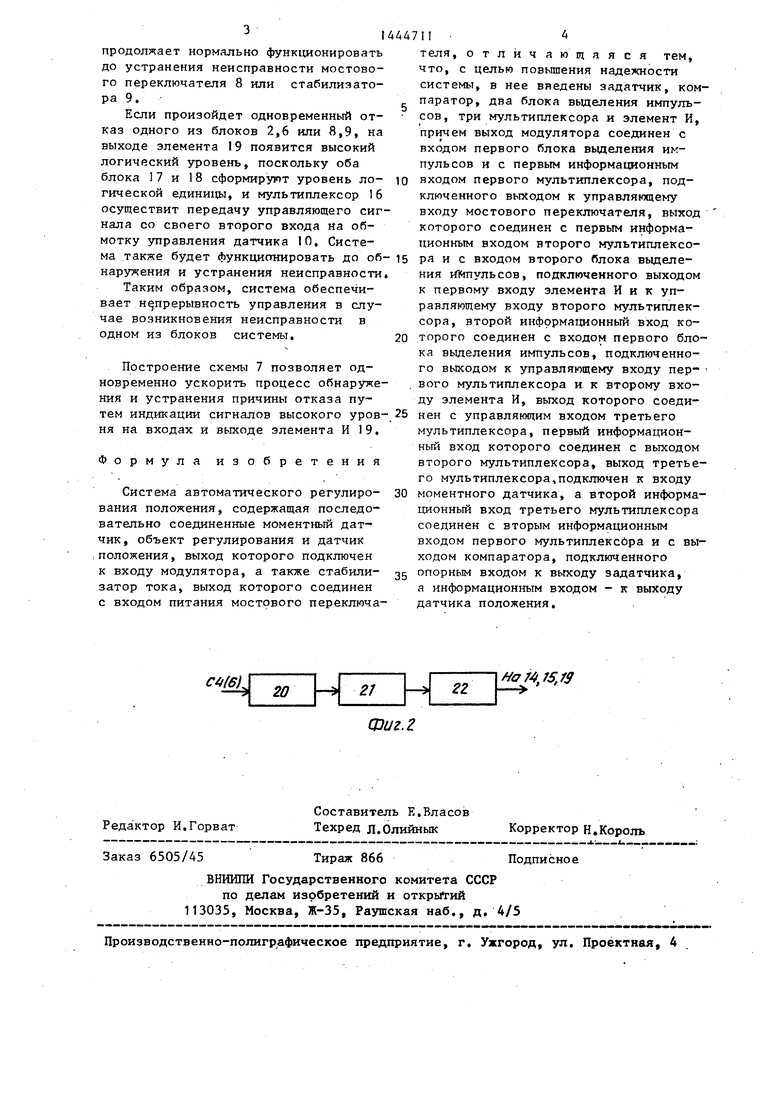
На фиг,1 изображена функциональная схема системы; на фиг.2 - пример выполнения блоков вьщеления импульсо
Система содержит (фиг,О датчик 1 положения, аналого-цифровой преобря зователь (А1Щ) 2, вбгчислитель 3 и преобразователь код-временной интервал (ПКВ) 4, задатчик 5 сигналов внешней .информации, модулятор 6, переключающую схему 7, мостовой переключатель 8, стабилизатор 9 тока, мо- ментный датчик 10, объект регулирования 11, компаратор 12, задятчик 13, мультиплексоры 14 - IS, блоки 17 и 18 выделения импульсов, элемен И 9 Блок 17 (18) включает (фиг,2) блок дифференцирования 20, блок вьщеления модуля 21, сглаживающий фильтр 22,
Система работает следующим образом.
Датчик 1 формирует сигнал, несущий информацию о состоянии, положении объекта 11, Этот сигнал поступа- ет на модулятор б, который выполнен, например, в виде АЦП 2, вычислителя 3, ПКВ 4 и задатчика 5, В случае управления компасом вычислитель 3 может быть вьтолнен в виде сумматора, на второй вход которого поступает с задатчика 5 код sin / или иной корректирующей добавки.
На выходе модулятора 6 присутствует временной интервал в виде импульсов с переменной скважностью или в виде двух последовательностей импульсов, сдвинутых друг относительно друга (тактовой последовательности и информационной, каждая на своей шине). Это зависит от выполнения ПКВ 4 и мостового переключателя 8,
Питание мостового переключателя 8 осуществляется от стабилизатора 9, так что временной интервал, присутствующий на выходе модулятора 6, преобразуется в нагрузке мостового переключателя (ей служит, например, обмотка управления дaтчиka 10). в среднее значение тока. Амплитуда импульсов тока в цепи нагрузки мостового -переключателя 8, задаваемая
0
5
стабилизатором 9, остается при этом неизменной, чем достигается постоянство тепловыделения в нагрузке и, следовательно, стабильность управлег
НИН,
Подключение нагрузки мостового переключателя 8 к датчику 10 (фиг,1) осуществляется через схему 7, При по0 явлении импульсов на выходе модулятора б блок 17 формирует управляющий сигнал (например, низкий логичесю-гй уровень) с помощью инвертора на выходе фильтра 22 на управляющем входе
5 мультиплексора 14 и на управляющий вход мостового переключателя 8 поступает выходной сигнал модулятора б,
Если импульсы на выходе модулятора 6 отсутствуют, блок 17 формирует, например, высокий лоп гаеский уровень. При этом на управляющий вход мостового переключателя 8 поступает сигнал с KONfflapaTOpa 12, Выходное напряжение задатчика 13 регулируется в процессе наладки и в простейшем случае равно нулю. Тогда полярность выходного сигнала компаратора 12 (знак определяется из условия осуществления отрицательной обратной связи) за0 висит от знака сигншта рассогласования на выходе датчика 1, В простейшем случае схема 7 может содержать только мультиплексор 14 и блок 1-7, и выход нагрузки мостового переключа5 теля 8 может быть соединен непосредственно со входом датчика 10,
Таким образом, при возникновении неисправности АЦП 2 или модулятора б система продолжает функционировать,
0 осуществляя управление от датчика 1, Так же происходит работа системы в случае выполнения схемы 7 так, как показано на- фиг, при нормальном .функционировании стабилизатора 9 и
5 мостового переключателя 8, поскольку при этом блок 18 формирует низкий управляющий уровень и на выходе элемента И 19 также присутствует низкий уровень, так что оба мультиплексора
П 15 и 1 б осуществляют передачу импульсов VoKa с выхода мостового переключателя 8 на вход дйтчика 10,
При пропадании импульсов в цепи нагрузки мостового переключателя 8
5 мультиплексор 15, управляемый блоком 18, осуществляет передачу управляю- ,щих импульсов с выхода модулятора 6 |через мультиплексор 1 б на вход датчика 10, В этом случае система также
3,
продолжает нормально функ1щонировать до устранения неисправности мостового переключателя 8 или стабилизатора 9.
Если произойдет одновременный отказ одного из блоков 2,6 или 8,9, на выходе элемента 19 появится высокий логический уровень, поскольку оба блока 17 и 8 сформируют уровень логической единшщ, и мультиплексор 16 осуществит передачу управляющего сиг нала со своего второго входа на обмотку управления датчика 10, Система также будет функционировать до об наружения и устранения неисправности
Таким образом, система обеспечивает непрерывность управления в случае возникновения неисправности в одном из блоков системы.
Построение схемы 7 позволяет одновременно ускорить процесс обнаружения и устранения причины отказа путем индикации сигналов высокого уровня на входах и выходе элемента И 19.
Формула изобретения
Система автоматического регулирования положения, содержащая последовательно соединенные моментный датчик, объект регулирования и датчик .положения, выход которого подключен к входу модулятора, а также стабилизатор тока, выход которого соединен с входом питания мостового переключаA47II
теля, отличающаяся тем, что, с целью повьшения надежности системы, в нее введены задатчик, ком- паратор, два блока выделения импуль- - сов, три мультиплексора и элемент И, причем выход модулятора соединен с входом первого блока выделения импульсов и с первым информационным
10 входом первого мультиплексора, подключенного выходом к управляющему входу мостового переключателя, выход которого соединен с первым информационным входом второго мультиплексо- 15 ра и с входом второго блока выделения 1ГМпульсов, подключенного выходом к первому входу элемента Инк управляющему входу второго мультиплексора, второй информационный вход ко20 торого соединен с входом первого блока вьщеления импульсов, подключенного вькодом к управляющему входу пер- вого мультиплексора и к второму входу элемента И, выход которого соеди25 нен с управляющим входом третьего мультиплексора, первый информационный вход которого соединен с выходом второго мультиплексора, выход третьего мультиплексора,подключен к входу
30 моментного датчика, а второй информационный вход третьего мультиплексора соединен с вторым информационным входом первого мультиплексбра и с выходом компаратора, подключенного
35 опорным входом к выходу задатчика, а информационным входом - к выходу датчика положения.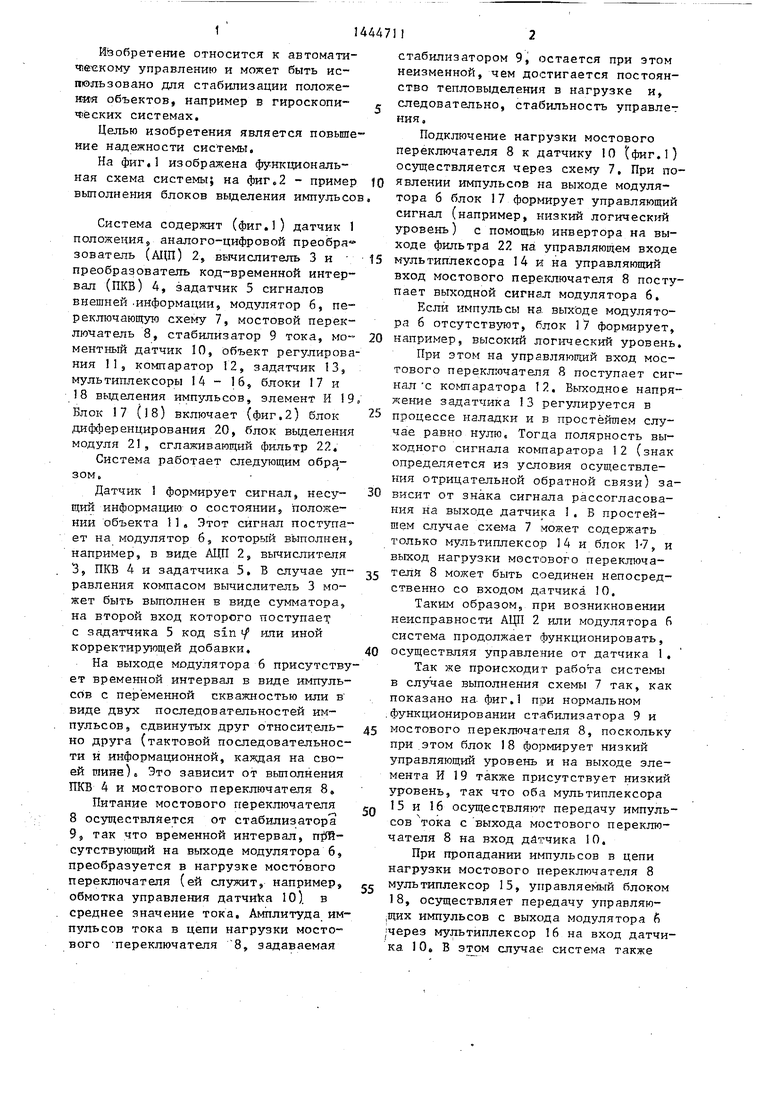
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой акселерометр | 1982 |
|
SU1081548A1 |
| Система экстремального регулирования квадрупольного масс-спектрометра | 1989 |
|
SU1795419A1 |
| Датчик угловой скорости | 1985 |
|
SU1296949A1 |
| МНОГОКАНАЛЬНЫЙ ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ С ЗАЩИТОЙ | 1990 |
|
RU2011258C1 |
| Устройство для измерения произведения двух напряжений | 1983 |
|
SU1195265A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| СИСТЕМА БЕСПЕРЕБОЙНОГО ЭЛЕКТРОПИТАНИЯ | 1992 |
|
RU2037249C1 |
| Устройство для функционально-параметрического контроля логических элементов | 1987 |
|
SU1562864A1 |
| Устройство для диагностики и прогнозирования отказов | 1989 |
|
SU1629898A1 |
| Стабилизатор постоянного регулируемого тока | 1990 |
|
SU1728853A1 |
-/ЙУ,
Редактор И.Горват
Составитель Е.Власов Техред Л.Олийнык
Заказ 6505/45
Тираж 866
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
На . г9
Фиг. г
Корректор Н.Король
Подписное
| Гироскопические системы /Под ред | |||
| Д.С.Пельпора, ч.1, М.: Высшая школа, 1977, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Коновалов С,Ф | |||
| и др | |||
| Гироскопические системы, ч.III | |||
| М.: Высшая школа, 1980, с | |||
| Механический грохот | 1922 |
|
SU41A1 |
