00
О1
4
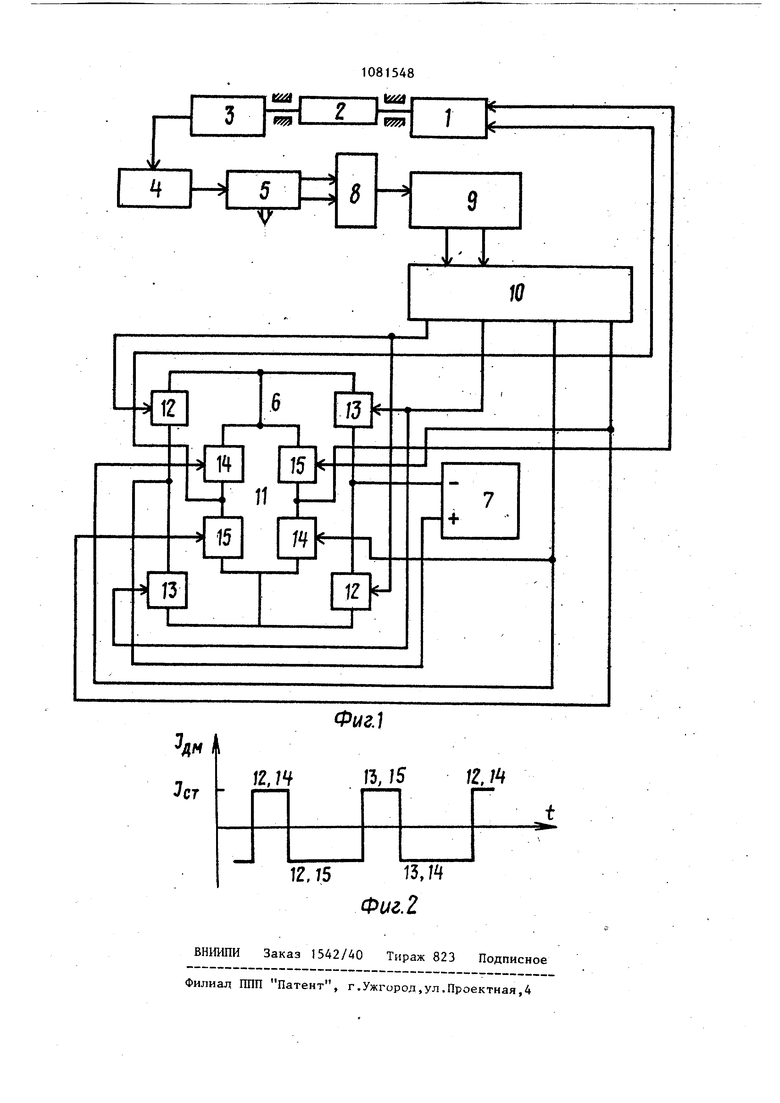
00 Изобретение относитс В к измерительной технике и может быть использовано для измерения и индикации ускорений объектов в навигацион,ной технике, океанографии и других областях.. Известен цифровой акселерометр, содержащий последовательно соединенные датчик угла, усилитель и преобразователь напряжение-код, причем выход усилителя через цепь обратной связи соединен с управляющим ВХОДОМ датчика момента lj . Недостатком этого устройства является низкая точность, обусловленная зависимостью температурного режима обмотки датчика момента, а следовательно, и показаний акселеромет ра от выходного сигнала датчика угла вследствие отсутствия стабилиза ции мощности, выделяемой в цепи обратной связи и обмотке датчика момента. Наиболее близким к изобретению по технической сущности является цифровой акселерометр, содержащий последовательно соединенные датчик момента, чувствительный элемент, датчик угла, усилитель и модулятор, а также мостовой переключатель, вход питания которого соединен с выходом стабилизатора тока z. В известном акселерометре благодаря введению импульсной обратной связи частично устраняется погрешность, связанная с колебаниями мощности, выделяемой в обмотке датчика момента, при изменении измеряемого ускорения. Однако при изменении направления тока в управлякщей обмотк датчика момента происходит изменени нагрузки стабилизатора тока вследст вие разброса параметров электронных ключей в плечах мостового переключа теля, что наряду с различной длительностью положительного и отрицательного фронтов, которая также обу ловлена разбросом параметров электронных ключей, приводит к тому,что величина тока в обмотке датчика момента зависит от его направления, и следовательно, мощность, выделяемая в этой обмотке, зависит от величины внешнего воздействия на чувствитель ный элемент. Эти обстоятельства приводят к снижению точности акселе рометра. 82 Целью изобретения является повышение точности измерения ускорения. Указанная цель достигается тем, что в цифровой акселерометр, содержащий последовательно соединенные датчик момента, чувствительный элемент, датчик угла, усилитель и модулятор, а также мостовой переключатель, вход питания которого соединен с выходом стабилизатора тока, введены последовательно соединенные схема ИЛИ, двухразрядный двоичный счетчик и дешифратор, а также второй мостовой переключатель, причем выходы модулятора соединены с входами схемы ИЛИ, первый и второй выходы дешифратора - с управляющими входами первой и второй пар противоположных ключей первого мостового переключателя соответственно, третий и четвертый выходы дешифратора - с управляющими входами первой;и второй пар противоположных ключей второго мостового переключателя соответственноj вход питания которого подключен к вмходу нагрузки первого мостового переключателя, а выход нагрузки второго мостового переключателя - к входу датчика момента. , Ни фиг.1 приведена схема акбелерометра на фиг.2 - временная диаграмма, поясняющая путь протекания тока в цепи управляющей обмотки .датчика момента. Цифровой акселерометр содержит последовательно соединенные датчик 1 моментаJ чувствительный элемент 2, датчик 3 угла, усилитель 4 и модулятор 5, а также мостовой переключатель 6, вход питания которого соединен с выходом стабилизатора 7 тока. Кроме того, в акселерометр введены последовательно соединенные схема ИЛИ 8, двухразрядный двоичный счетчик 9 и дешифратор 10, а также второй мостовой переключатель 11. Выходы модулятора 5 соединены с входами схемы ИЛИ 8, первый и второй выходы дешифратора 10 - с управляющими входами первой 12 и второй 13 пар противоположных ключей первого мостового переключателя 6 соответственно, третий и четвертый выходы дешифратора 10 - с управляющими входами первой 14 и второй 15 пар противопоЛол{ных ключей второго мостового переключателя 11 соответственно. Вход питания переключателя 11 подключен к выходу нагрузки переключателя 6, а выход нагрузки переключателя 11 - к входу датчика 1 момента. Устройство работает следующим образом. При воздействии ускорения на объект, на котором размещен чувствительный элемент 2, подвижная часть последнего перемещается, в результате чего на выходе датчика 3 угла появляется сигнал, поступающий через усилитель 4 на модулятор 5. Последний осуществляет выдачу цифрового кода в ЦВМ и формирова ние двух последовательностей импуль сов на соответствующих выходах,причем интервал времени между импульса ми (ШИМ) или .их частота (ЧИМ) пропорциональны выходному сигналу датчика 3. Указанные импульсы складываются на схеме 8 и поступают на схеме b и поступают на счетный вход двоичного счетчика 9, на выходах которого формируется последовательность логических уровней: 00, 01, 10, 11, 00 Дешифратор 10 формирует из указанной последовательности на своих четырех выходах соответственно следующую последовательность управляющих сигналов: 1010, 1001, 0101, 0110 и вновь 1010, и т.д. В результате ток стабилизатора 7 протекает 484 через обмотку датчика 1 момента то в одну, то в другую сторону (фиг.2), обеспечивая управление положением подвижной части чувствительного элемента 2. . Путь прохождения тока через обмотку датчика 1 момента в каждом направлении периодически меняется (фиг.2). Так, например, i-ый положительный импульс протекает через пары ключей 12 и 14, а ()-ый положительный импульс -т через другие пары ключей 13и 15. Поскольку через плечи мостового переключателя 11 ток протекает в обе стороны, ключи 14 и 15 должны быть выполнены двунаправленными, т.е. таким образом, чтобы сопротивления каждого из них при протекании тока в обоих направлениях были равны или отличались незначи- . тельно. Таким образом, в- среднем сопротивление мостовых переключателей 6 и 11 току стабилизатора 7 остается постоянным и не зависит от сигнала на выходе модулятора 5, если учесть, что изменение последнего происходит доста,точно медленно от периода к периоду. Это обстоятельство обеспечивает исключение погрешности цифрового акселерометра, вызванной разбросом параметра ключевых элементов, а следовательно, и повьш1ение точности измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ В ДАТЧИКЕ УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ И ДАТЧИК УГЛОВОЙ СКОРОСТИ С ДИСКРЕТНЫМ ВЫХОДОМ | 2004 |
|
RU2272297C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2447451C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2360258C1 |
| Цифровой акселерометр | 1984 |
|
SU1242831A1 |
| Система автоматического регулирования положения | 1986 |
|
SU1444711A1 |
| Трехкомпонентный акселерометр | 1981 |
|
SU1049432A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2449292C1 |
| Датчик угловой скорости | 1985 |
|
SU1296949A1 |
ЦИФРОВОЙ АКСЕЛЕРОМЕТР, содержащий последовательно соединенные датчик момента, чувствительный элемент, датчик угла, усилитель и модулятор, а также мостовой переключатель, вход питания которого соединен с выходом стабилизатора тока. 1|Г1- ;С ЗН 1 . I 1 H«fKt. 55 r|,XHi1.M:)//;.:: . i«tJiW) о тлич ающийс я тем, что, с целью повьш1ения точности измерения, в него-введены последовательно соединенные схема ШШ, двухразрядный двоичный счетчик и дешифратор, а также второй мостовой переключатель, причем выходы модулятора соединены с входами схемы ИЛИ, первый и второй выходы дешифратора - с управляющими входами первой и второй пар противоположных ключей первого мостового переключателя соответственно, третий и четвертый выходы дешифратора - с управляющими входами первой и второй пар противоположных ключей второго мостового переключателя соответственно, вход (Л питания которого подключен к выходу н-агрузки первого мостового переключателя, а выход нагрузки второго мостового переключателя - к входу датчика момента.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Коновалов С.Ф | |||
| и др | |||
| Гироскопические системы | |||
| Ч | |||
| III | |||
| М., Высшая школа, 1980, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Коновалов С.Ф | |||
| и др | |||
| Гироскопические системы | |||
| Ч | |||
| III | |||
| М., Высшая школа, 1980, с | |||
| Механический грохот | 1922 |
|
SU41A1 |
| . | |||
