W
с
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КЛАССИФИКАЦИИ МНОГОПАРАМЕТРИЧЕСКИХ ОБЪЕКТОВ | 1991 |
|
RU2049355C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| Устройство для контроля характеристик накопителей на гибких магнитных дисках | 1989 |
|
SU1610486A1 |
| Устройство для диагностики и прогнозирования отказов | 1989 |
|
SU1629898A1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ ТЕЛЕВИЗИОННОЙ АППАРАТУРЫ | 1989 |
|
RU2050700C1 |
| Способ диагностики отказов динамических объектов и устройство для его осуществления | 1990 |
|
SU1718190A1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2018 |
|
RU2702129C1 |
| Устройство для диагностирования радиоэлектронных объектов | 1989 |
|
SU1691819A1 |
| Способ диагностирования состояния технического объекта с выбросами параметров и устройство для его осуществления | 1988 |
|
SU1573461A1 |
| Устройство для диагностирования радиоэлектронного объекта | 1984 |
|
SU1173395A1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для диагностики систем, описьгоаемых статическими и динамическими сигналами. Цель изобретения - расширение области примен ения устройства. Устройство содержит блок записи параметров, матрицу состояний, селектор максимального уровня, блок индикации, генератор стробирующих сигналов, переключатель режимов и блок вьщеления признаков контролируемого сигнала. Устройство обеспечивает обучение и распознавание классов состояний объектов, описываемых на только статическими, но и динамическими сигналами. 2 ил.
4
4
4 00
tc
00
N
10
11444828
Изобретение относится к контрольно-измерительной и испытательной технике и может быть использовано для диагностирования технического состояния систем, которые описываются как статическими параметрами, так и динамическими сигналами, и является дополнительным к авт. св. № 1174943.
Целью изобретения является расширение области применения на класс объектов, состояние которых описывается динамическими сигналами.
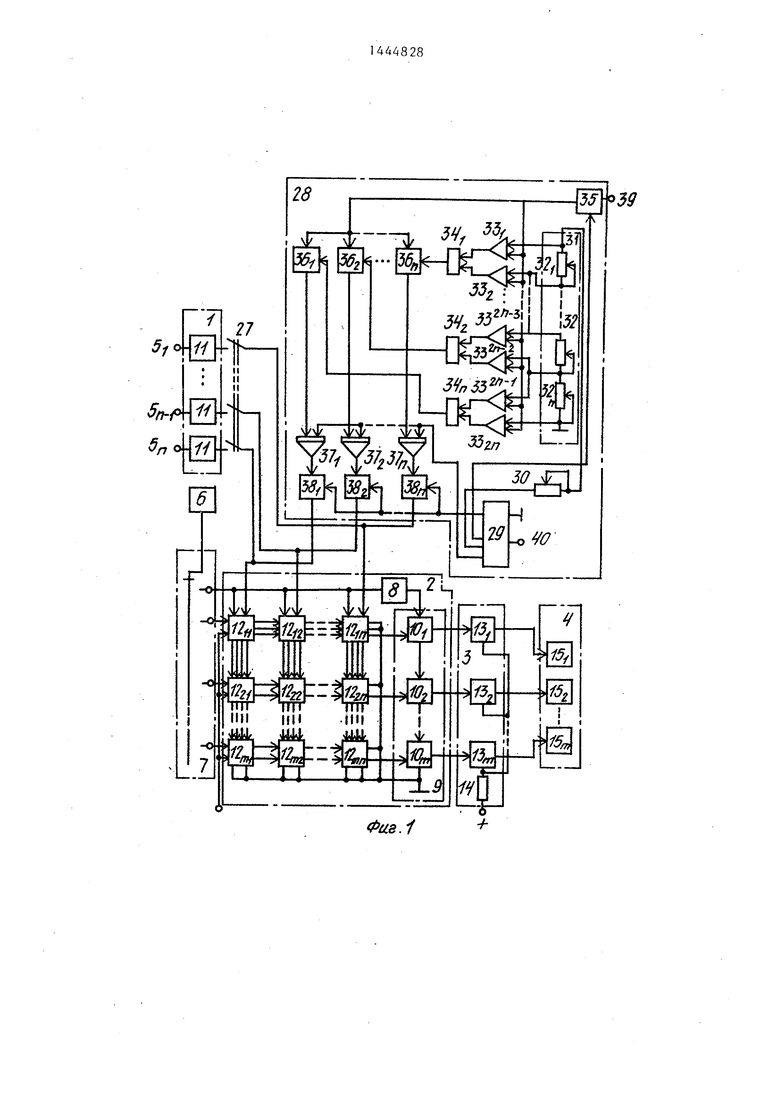
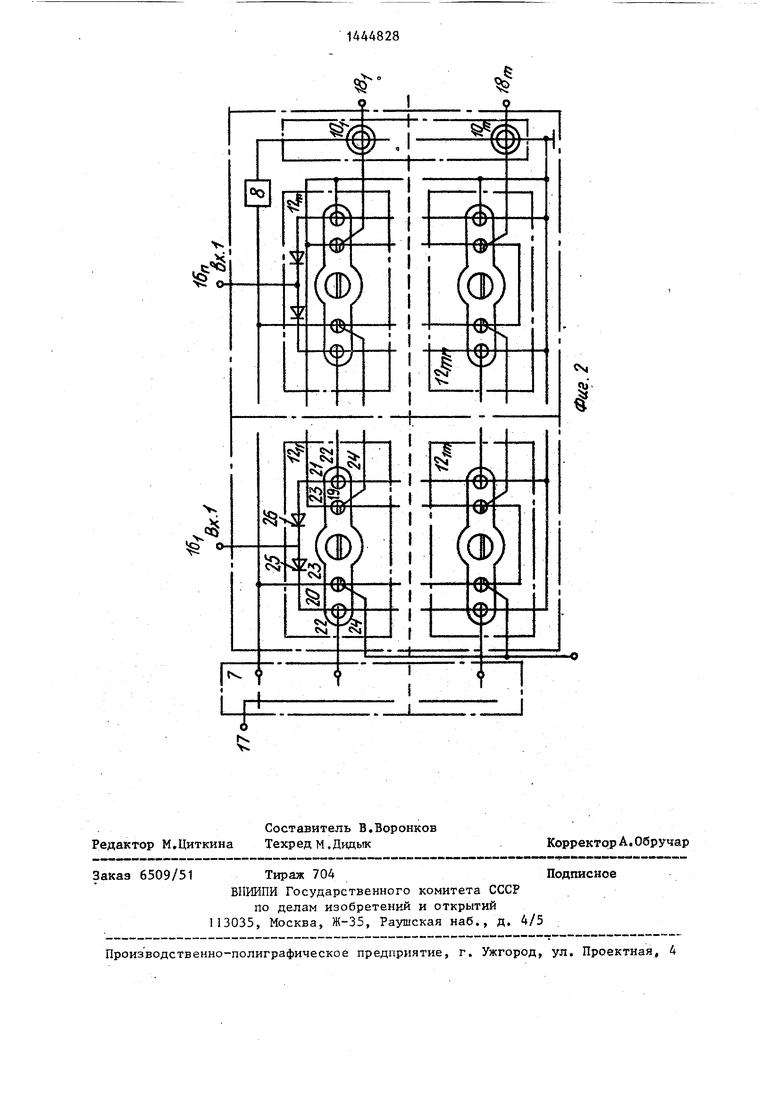
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - схема матрицы состояний.
Устройство содержит блок 1 записи параметров, матрицу 2 состояний, селектор 3 максимального уровня, блок 4 индикации, входы 5 для подачи статических сигналов, генератор 6 стро- бирующих импульсов, переключатель 7 режимов, линию 8 задержки, блок 9 импульсного смещения, ферритовые
пропорционален измеренному значению соответствующего параметра. Обычно каждый датчик 11 содержит устройств нормирования. Сигнал на выходе датчика может быть двоичным (при допуско- вом контроле) либо непрерывным (при недопусковом контроле).
Совокупность из п двоичных или не прерывных сигналов через многополюсный выключатель подается на вертикал ные (столбцовые) шины матрицы 2 состояний, при этом устройство может находиться в двух режимах работы: чения и распознавания (диагностирования).
В режиме обучения задается ряд конкретных изображений, которые соответствуют определенному i-му классу
20 технических состояний объекта.
Совокупность сигналов с выхода
блока 1, соответствующая известному классу состояния объекта, поступает на информационные входы 16 матрицы
кольца 10 блока импульсного смещения, 25 2 состояний (фиг.2). При этом каждьй
датчики 11 параметров, адаптивные j-й сигнал подается на соответствуюэлементы 12, усилительные каскады 13,
резистор 14, индикаторы 15, информащий j-й вход и далее через первьй диод 25 или второй диод 26 (в зависимости от полярности сигнала) на одну из вертикальных шин j-ro столбца (j-1,n).
ционные входы 16 матрицы состояний, вход 17 переключателя 7 режимов, вы- ЗО
щий j-й вход и далее через первьй диод 25 или второй диод 26 (в зависимости от полярности сигнала) на одну из вертикальных шин j-ro столбца (j-1,n).
Одновременно в одну из строк матрицы 2 состояний, в которой надо запомнить предложенную совокупность па
7 режимов сигнал адаптации (записи)«
С помощью переключателя 7 выбира ется нужная i-я строка. Сигнал от геход 18 матрицы состояний, пятиотвер- стный трансфпюксор 19, первую входную обмотку 20, вторую входную обмотку 21, обмотку 22 записи, обмотку 23
считьшания, выходную обмотку 24, пер- раметров, подается от генератора 6 вьй 25 и второй 26 диоды, многополюс- через многопозиционный переключатель ный выключатель 27, блок 28 выделения признаков контролируемого сигнала, узел 29 управления, узел 30 установки верхнего предела контролируемо- Q нератора 6 подается через замкнутые го сигнала (реостат), делитель 31 i-e контакты переключателя 7 на го- напряжения, вторые резисторы 32, компараторы 33, элементы И 34, первый ключ 35, вторые ключи 36, интеграторы 37, третьи ключи 38, информационньй вход 39, клемму питания 40.
Устройство работает следунлцим образом.
При диагностировании объекта, описываемого статическими параметрами, последний подключается к блоку 1 че.т рез входы 5 устройства, причем каждому параметру объекта соответст45
ризонтальную тину, составленную из последовательно соединенных обмоток 22 записи всех адаптивньщ элементов 12, расположенных в i-й строке матрицы (,т) и выполненных на пятиотвер стных трансфлюксорах 19.
Совместное появление сигналов в i-й горизонтальной и во всех вертикальных шинах вызывает изменение состояния адаптивных элементов 12, расположенных в этой строке.
вует вполне определенньй j-й вход (,n). Значения параметров измеряются соответствующими датчиками 11, общее число которых равно числу измеряемых параметров. На выходе каждого датчика 11 электрический сигнал
0
пропорционален измеренному значению соответствующего параметра. Обычно каждый датчик 11 содержит устройство нормирования. Сигнал на выходе датчика может быть двоичным (при допуско- вом контроле) либо непрерывным (при недопусковом контроле).
Совокупность из п двоичных или не прерывных сигналов через многополюсный выключатель подается на вертикальные (столбцовые) шины матрицы 2 состояний, при этом устройство может находиться в двух режимах работы: обу5 чения и распознавания (диагностирования).
В режиме обучения задается ряд конкретных изображений, которые соответствуют определенному i-му классу
0 технических состояний объекта.
Совокупность сигналов с выхода
щий j-й вход и далее через первьй диод 25 или второй диод 26 (в зависимости от полярности сигнала) на од; ну из вертикальных шин j-ro столбца (j-1,n).
Одновременно в одну из строк матрицы 2 состояний, в которой надо запомнить предложенную совокупность па7 режимов сигнал адаптации (записи)«
С помощью переключателя 7 выбира ется нужная i-я строка. Сигнал от гераметров, подается от генератора 6 через многопозиционный переключатель нератора 6 подается через замкнутые i-e контакты переключателя 7 на го-
раметров, подается от генератора 6 через многопозиционный переключатель нератора 6 подается через замкнутые i-e контакты переключателя 7 на го-
ризонтальную тину, составленную из последовательно соединенных обмоток 22 записи всех адаптивньщ элементов 12, расположенных в i-й строке матрицы (,т) и выполненных на пятиотвер- стных трансфлюксорах 19.
Совместное появление сигналов в i-й горизонтальной и во всех вертикальных шинах вызывает изменение состояния адаптивных элементов 12, расположенных в этой строке.
При многократной подаче совокупностей параметров определенного класса состояния объекта и наличии сигнала от генератора 6 в данной строке матрицы формируется устой швое изображение 1т5Го СОСТОЯНИЯ объекта.
Аналогично формируются изображения других технических состояний объекта.
В режиме распознавания, т.е. при диагностировании объекта, подвижный контакт переключателя 7 режимов переводится в положение О, тем самым прекращается подача импульсного сигнала в обмотки 22 записи адаптивных элементов 12. На вертикальные шины матрицы 2 через ее информационные входы подается некоторая совокупность параметров, описьгоающих неизвестное состояние диагностируемого объекта. Одновременно на обмотки 23 считывания адаптивных элементов 12 через вход 17 и переключатель 7 режимов поступает от генератора 6 импульсный сигнал считьгоания (обмотки 23 всех адап
тивных элементов, расположенных в од- 20 сигнала сначала накапливаются на
ном столбце, соединены последовательно) . Тем спмым обеспечивается нераз- рушающее считьтание сигналов со всех адаптивных элементов матрицы.
интеграторах 37 в течение заданног времени, а по истечении этого врем подаются на входы матрицы 2 состоя В качестве признаков реализации
Считьгоание характеризуется появле- 25 динамического сигнала выбираются врением сигналов в выходных обмотках 24 пятиотверстных трансфлюксоров 19 адаптивных элементов 12.
Так как обмотки 24 всех элементов 12, расположенных в данной строке jO матрицы, соединены между собой последовательно, происходит алгебраическое суммирование сигналов, считанных с этих элементов.
Суммарньй сигнал характеризует
мена нахождения данной реализации на заданных амплитудных интервалах при определенном времени анализа. В этом случае каждой реализации динамического сигнала соответсвует определенный вектор признаков.
степень совпадения совокупности пода ваемых с объекта параметров со знаВьщеление признаков реализации динамического сигнала осуществляется следующим образом.
По сигналу с третьего выхода узла 29 управления замыкается первый ключ 35 и подает анализируемый сигнал на входы вторых ключей 36 и на первые .- входы компараторов 33. Кроме того.
элементах этих строк. Чем больше это сигнал, тем более схожими являются распознаваемое состояние объекта и образ этого состояния, запомненный в данной строке матрицы 2 состояний. Суммарные сигналы из всех строк матрицы (,т) записываются в фер- ритовые кольца 10 блока 9.. Последние вместе с линией задержки обеспечиваю синхронизацию по фазе этих сигналов, что улучшает условия для выбора из них максимального сигнала селектором 3 максимального уровня. Достигается это тем, что сигналы от генератора 6 подаются через вход 17 и переключатель 7 режимов одновременно на обмотки 23 считывания и на линию 8 задержки. После задержки их на опреде- ленный интервал времени они поступают на обмотки считывания ферритовых колец 10. Благодаря этому обеспечивает
ся синфазность сигналов на выходах 18 матрицы 2 состояний и их надежное се- лектирование по максимуму.
Каждый канал содержит усилительный каскад 13. При поступлении на входы каналов селектора 3 сигналов с выходов 18 матрицы 2 состояний срабатыва ет лишь тот канал, на выходе которого оказьтается максимальньй сигнал. Это обеспечивается за счет отрицательной обратной связи между усилительными каскадами разных каналов, задаваемой резистором 14.
Работа устройства в случае динамического сигнала происходит аналогично. Отличие состоит в том, что значения признаков анализируемого (или используемого для обучения) динамического
сигнала сначала накапливаются на
интеграторах 37 в течение заданного времени, а по истечении этого времени подаются на входы матрицы 2 состояний, В качестве признаков реализации
мена нахождения данной реализации на заданных амплитудных интервалах при определенном времени анализа. В этом случае каждой реализации динамического сигнала соответсвует определенный вектор признаков.
O
Вьщеление признаков реализации динамического сигнала осуществляется следующим образом.
По сигналу с третьего выхода узла 29 управления замыкается первый ключ 35 и подает анализируемый сигнал на входы вторых ключей 36 и на первые - входы компараторов 33. Кроме того.
узел 29 управления подает питание на свой второй выход, напряжение с которого подается через реостат 30 на делитель 31 напряжения.
С резисторов 32 сигналы подаются на первые входы компараторов 33. Так, на второй вход первого компаратора подается нулевой потенциал, второго - потенциал, равный падению напряжения на (N-I)-M резисторе, третьего - потенциал, равный падению напряжения на (N-2)-x резисторах, (N-l)-ro - потенциал, равньй падению напряжения на одном резисторе. На второй вход N-ro компаратора подается максимальное напряжение, подаваемое с установочного реостата 30.
Компараторы 33 каждой пары работают следующим образом.
514А4828
Сигнал на выходе нечетного компа- Формула ратора появляется тогда, когда напря- %кение на его втором входе, подаваемое
6
изобретения
Устройство дпя диагностики технис делителя напряжения, превышает нап ческих систем по авт. св,№ 1174943,
О
отличающее ся тем, что,
с целью расширения области применения на класс систем с динамическими сигналами, в устройство введены мнола, информационный вход которого является информационным входом устрой™ ства, группа выходов блока вь;целекия
ряжение на его первом входе, соответствующее амплитуде анализируемого сигнала. Сигнал на выходе четного компаратора 33, наоборот, появляется,
если напряжение на втором входе MeHb-ijo гополюсный выключатель и блок выделе- ше .напряжения на первом входе. Таким ния признаков контролируемого сигна- образом, сигнал на выходах обоих компараторов 33 одной из пар, а следовательно,, и на выходе элемента И 34, будет в том случае, когда значение 15 признаков контролируемого сигнала под- амплитуды анализируемого сигнала на- ключена к группе информационных вхо- ходится между значениями потенциалов, подаваемых с делителя 31 напряжения на вторые входы этой пары компараторов 33. В этом случае срабатывает второй ключ 36, управляющий вход которого соединен с данным элементом И 34, и пропускает анализируемый сигнал на соответствующий интегратор 37.
дов матрицы состояний, выводы многополюсного переключателя соединены с выходами блока записи параметров и с 20 группой информационных входов матрицы f состояний,причем блок выделения признаков контролируемого сигнала содержит узел управления, узел установки верхнего предела контролируемого сигнала,де-
Следовательно, при попадании анализируемого сигнала на тот или иной амплитудный уровень будет открываться, а при уходе с этого уровня закрьюать- ся соответствующий второй ключ 36, ,
При этом конденсатор того или иного ЗО мационные входы к выходам группы интегратора 37 на период анализа за вторых ключей, а входы сброса - к перрядится до Напряжения, соответствую™ щего сумме времен пребывания анализируемого сигнала на данном амплитудном уровне за этот период.
По истечении времени анализа с четвертого выхода узла 29 управления подается сигнал на управляющие входы третьих ключей 38, которые срабатывают и соединяют вьпсоды интеграторов 37 с входами матрицы 2 состояний, с помощью которой производится распознавание .
Перед очередным циклом диагностирования производится обнуленле интеграторов 37 путем подачи на их обнуляющие входы сигнала с первого выхода узла 29 управления.
С помощью реостата 30 осуществляется регули эовка верхнего предела напряжения, а ширина амплитудных интервалов задается изменением сопротивлений регулируемых резисторов 32,
Узел 29 управления может быть реализован в виде набора выключателей, управляемых вручнзпо, либо на базе реле времени.
6
изобретения
рмула
Устройство дпя диагностики техниотличающее ся тем, что,
с целью расширения области применения на класс систем с динамическими сигналами, в устройство введены мнола, информационный вход которого является информационным входом устрой™ ства, группа выходов блока вь;целекия
гополюсный выключатель и блок выделе- ния признаков контролируемого сигна- признаков контролируемого сигнала под ключена к группе информационных вхо-
ополюсный выключатель и блок выделе- ния признаков контролируемого сигна- признаков контролируемого сигнала под- ключена к группе информационных вхо-
дов матрицы состояний, выводы многополюсного переключателя соединены с выходами блока записи параметров и с группой информационных входов матрицы f состояний,причем блок выделения признаков контролируемого сигнала содержит узел управления, узел установки верхнего предела контролируемого сигнала,де-
25 литель напряжениязпервьй 1члюч и группы . компараторов, элементов И, вторых и третьих ключей и интеграторов, выходы которых подключены к информационным входам группы третьих ключей, инфорЕому ВЫХОДУ узла управления, второй выход которого соединен с входом узла установки верхнего предела контролируемого сигнала, третий выход - с уп- равдяющим входом первого ключа, а чет- вертьй выход - с управляющими входами группы третьих ключей , информационные входы группы вторых ключей и первые
входы группы компараторов связаны с выходом первого ключа, вторые входы группь компараторов подключены к выходам делителя напряжения,.вход которого соединен с выходом узла установки верхнего предела контролируемого сигнала, выходы компараторов подключены к первым и вторьм входам элементов И группы, выходы которьк соедикв ны с управлянлдими входами группы вторых ключей,. информационный вход первого ключа является информационным входом блока выделения признаков контролируемого сигнала, выходы груп55
пы третьих ключей .составляю группу выходов блока выделения признаков контролируемого сигнала.
/4j
«
. I
n
Фи.8.1
| Авторское свидетельство СССР № 1174943, кл.С 06 F 15/46, 1983. |
