4s
СХ) 00 СО
Изобретение относится к системам автоматизированного проектирования машин и может быть применено для автоматизированного проектирования робо- тов модульного типа.
Цель изобретения расширение функциональных возможностей за счет моделирования поступательного и вращат ль- ного движения робота.
На фиг. 1 изображена схема робота; на фиг. 2 - полунатурная модель робота.
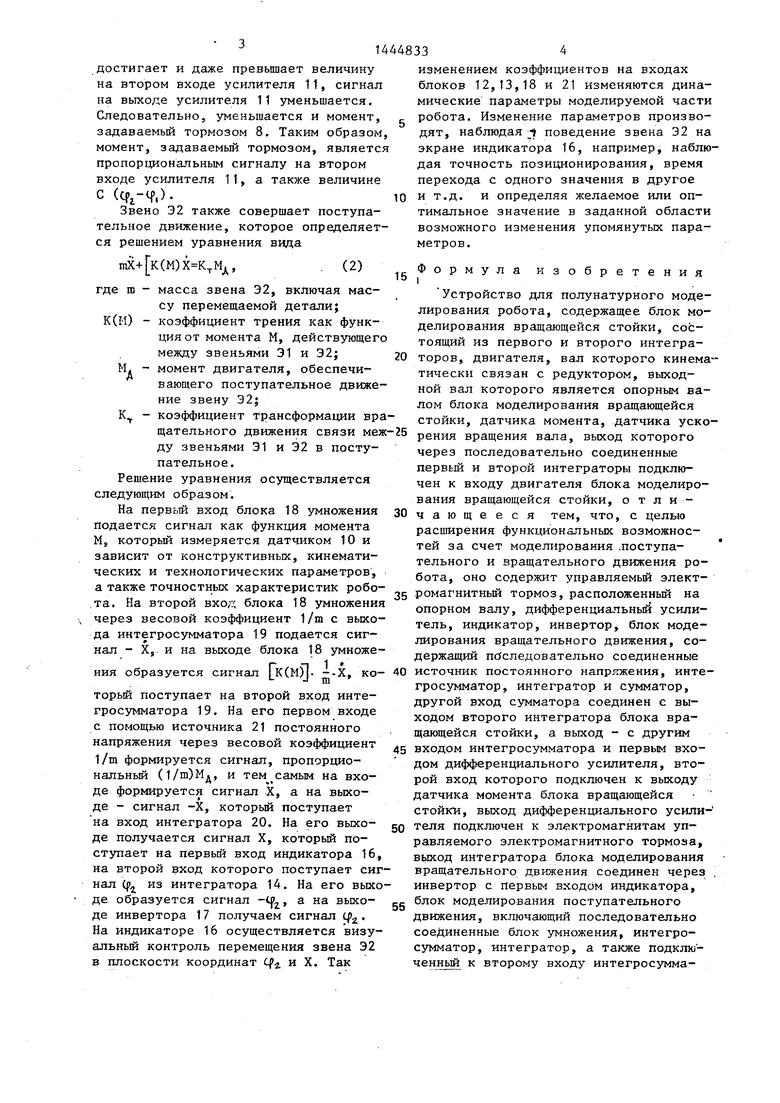
Устройство содержит блок 1 (фиг.2) моделирования вращающейся стойки Э (фиг. 1), состоящий из двигателя 2, соединенного через редуктор 3 с опорным валом 4 блока, и датчика 5 ускоре 144
Для решения уравнения (1) на вкод сумматора 12 подается сигнал, пропорциональный величине Ср с выхода интения вращения вала, выход которого
через последовательно соединенные ин- 20 гратора 14 через весовой коэффициент, теграторы 6 и 7 подключен к входу дви- и сигнал с выхода интегратора 7, про- гателя 2, кроме того, устройство содержит управляемый электромагнитный тормоз 8, надетьш на вал 4 блока, к
электромагнитам 9 которого подключен 25 который поступает на первый вход инте- выход датчика 10 момента через диффе- гросумматора 13 через весовой коэффи- ренциальный усилитель 11, к второму
порциональныи величине Ср, , также через весовой коэффициент С. На выходе сумматора формируется сигнал С ((fj-fp,)
циент 1/1. С помощью источника 15 постоянного напряжения на второй вход интегросумматора 13 подается сигнал,
входу которого подключен выход интегратора 7 через сумматор 12. На втоциент 1/1. С помощью источника 15 постоянного напряжения на второй вход интегросумматора 13 подается сигнал,
рой вход сумматора 12 подключен его 30 пропорциональньй величине i/I-M,. При
этом на его входе согласно уравнению (1) формируется сигнал ff , а на его выходе - сигнал, пропорциональный
же выход через последовательно соединенные интегросумматор 13 и интегратор 14, в свою очередь к второму входу интегросумматора 13 подключен
выход источника 15 постоянного напря-,5 Р ° выходе образуется сиг- жения. Устройство содержит также инди- «ал -Cf, чем осуществляется решение катор 16, к первому входу которого уравнения (1). подключен выход интегратора 14 через инвертор 17, а к второму входу - выCf,. Он поступает на вход интегратоСигнал, сформированный на выходе сумматора 12, пропорционален момен
0
48332
вращательным звеном Э2, Колонна робота представляется реальной, а звено Э2, включающее также схват и перемещаемую деталь, - формализованной частью. Координата вращательного перемещения звена Э2 относительно звена 31 определяется решением уравнения вида
Itp+C(Cfi-tf,)+M,0, (1) где I - приведенньш момент инерции
звена Э2 относительно оси колонны Э1 (фиг.1);
М - момент нагрузки на звено 32;
ср, - угол поворота колонны;
С - жесткость узла связи между звеньями Э1 и 32.
Для решения уравнения (1) на вкод сумматора 12 подается сигнал, пропорциональный величине Ср с выхода инте5
0 гратора 14 через весовой коэффициент, и сигнал с выхода интегратора 7, про- гратора 14 через весовой коэффициент, и сигнал с выхода интегратора 7, про-
который поступает на первый вход инте- гросумматора 13 через весовой коэффи-
порциональныи величине Ср, , также через весовой коэффициент С. На выходе сумматора формируется сигнал С ((fj-fp,)
который поступает на первый вход инте- гросумматора 13 через весовой коэффи-
циент 1/1. С помощью источника 15 постоянного напряжения на второй вход интегросумматора 13 подается сигнал,
Р ° выходе образуется с «ал -Cf, чем осуществляется решение уравнения (1).
Cf,. Он поступает на вход интегратоР ° выходе образуется си «ал -Cf, чем осуществляется решение уравнения (1).
Сигнал, сформированный на выходе сумматора 12, пропорционален момен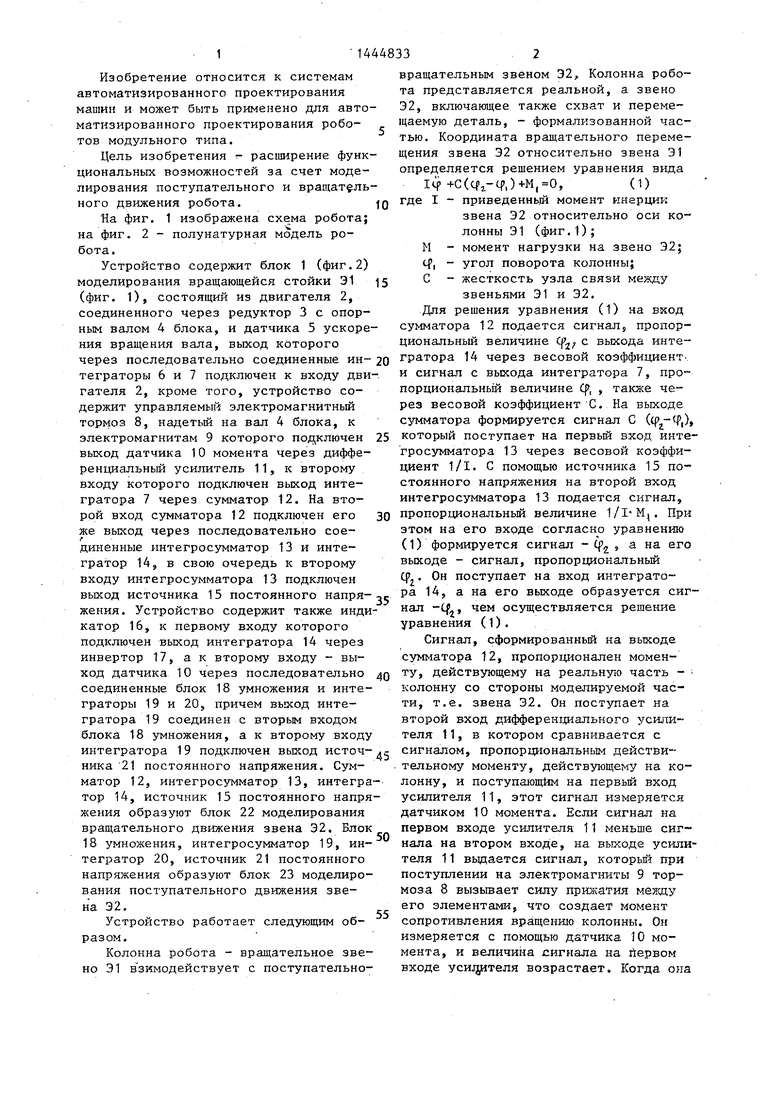
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурного моделирования червячного привода станка | 1987 |
|
SU1522247A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028930C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2041054C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2008 |
|
RU2394674C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2212329C1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631783C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2008 |
|
RU2380215C1 |
Изобретение относится к системам автоматизированного проектирования машин и может быть применено для автоматизированного проектирования роботов модульного типа. Цель изобретения - расширение функциональных возможностей за счет моделирования поступательного и вращательного движения робота. Цель достигается введением в устройство управляемого электромагнитного тормоза, расположенного на опорном валу, дифференциального усилителя, индикатора, инвертора, блоков моделирования вращательного и поступательного движений. 2 ил.
ход датчика 10 через последовательно 0 соединенные блок 18 умножения и интету, действующему на реальную часть колонну со стороны моделируемой части, т.е. звена 32. Он поступает на
граторы 19 и 20, причем вь-ход интегратора 19 соединен с вторьм входом второй вход дифференциального усили- блока 18 умножения, а к второму входу теля 11, в котором сравнивается с интегратора 19 подключен выход источ- дд сигналом, пропорциональным действи- ника 21 постоянного напряжения. Сумтельному моменту, действующему на ко лонну, и поступающим на первьй вход усилителя 11, этот сигнал измеряется датчиком 10 момента. Если сигнал на первом входе усилителя 11 меньше сиг нала на втором входе, на выходе усил теля 11 выдается сигнал, которьй при поступлении на электромагниты 9 тормоза 8 вызывает силу прижатия между его элементами, что создает момент сопротивления вращению колонны. Он измеряется с помощью датчика 10 момента, и величина сигнала на йервом входе уси;5ителя возрастает. Когда он
матор 12, интегросумматор 13, интегратор 14, источник 15 постоянного напряжения образуют блок 22 моделирования вращательного движения звена Э2. Блок 18 умножения, интегросумматор 19, интегратор 20, источник 21 постоянного напряжения образуют блок 23 моделирования поступательного движения зве- н а 32.
Устройство работает следующим образом.
Колонна робота - вращательное звено 31 в зкмодействует с поступательноту, действующему на реальную часть колонну со стороны моделируемой части, т.е. звена 32. Он поступает на
второй вход дифференциального усили- теля 11, в котором сравнивается с сигналом, пропорциональным действи-
второй вход дифференциального усили- теля 11, в котором сравнивается с сигналом, пропорциональным действи-
тельному моменту, действующему на колонну, и поступающим на первьй вход усилителя 11, этот сигнал измеряется датчиком 10 момента. Если сигнал на первом входе усилителя 11 меньше сиг нала на втором входе, на выходе усилителя 11 выдается сигнал, которьй при поступлении на электромагниты 9 тормоза 8 вызывает силу прижатия между его элементами, что создает момент сопротивления вращению колонны. Он измеряется с помощью датчика 10 момента, и величина сигнала на йервом входе уси;5ителя возрастает. Когда она
достигает и даже превышает величину на втором входе усилителя 11, сигнал на выходе усилителя 11 уменьшается. Следовательно, уменьшается и момент, задаваемый тормозом 8. Таким образом, момент, задаваемьй тормозом, является пропорциональным сигналу на втором входе усилителя 11, а также величине С (Cfi-q,).
Звено 32 также совершает поступательное движение, которое определяется решением уравнения вида
(М), де m
(2)
15
масса звена 32, включая массу перемещаемой детали; К(Г1) - коэффициент трения как функция от момента М, действующего между звеньями 31 и 32; 20
Мд - момент двигателя, обеспечивающего поступательное движение звену 32|
К - коэффициент трансформации вращательного движения связи меж-25
ду звеньями 31 и 32 в поступательное.
Решение уравнения осуществляется следующим образом.
На первый вход блока 18 умножения подается сигнал как функция момента Н, который измеряется датчиком 10 и зависит от конструктивных, кинематических и технологических параметров, а также точностных характеристик робота. На второй вход блока 18 умножения через весовой коэффициент 1/т с выхода интегросумматора 19 подается сигнал - Х, и на выходе блока 18 умноже Устройство для полунатурного моделирования робота, содержащее блок моделирования вращающейся стойки, cofc- тоящий из первого и второго интеграторов, двигателя, вал которого кинематически связан с редуктором, выходной вал которого является опорным валом блока моделирования вращающейся стойки, датчика момента, датчика ускорения вращения вала, выход которого
через последовательно соединенные первый и второй интеграторы подключен к входу двигателя блока моделирования вращающейся стойки, о т л и 30 чающееся тем, что, с целью расширения функциональных возможностей за счет моделирования .поступательного и вращательного движения робота, оно содержит управляемьй элект35 ромагнитный тормоз, расположенный на опорном валу, дифференциальный усилитель, индикатор, инвертор, блок моделирования вращательного движения, содержащий последовательно соединенные
ния образуется сигнал кСмЯ- --Х, ко- 40 источник постоянного напряжения, интеm
торьй поступает на второй вход интегросумматора 19. На его первом входе с помощью источника 21 постоянного напряжения через весовой коэффициент 1/т формируется сигнал, пропорциональный (l/in)M., и тем самым на вхо-
М«
де формируется сигнал X, а на выходе - сигнал -X, которьй поступает на вход интегратора 20. На его выходе получается сигнал X, который поступает на первьш вход индикатора 16, на второй вход которого поступает сигнал (р из интегратора 14. На его выходе образуется сигнал -, а на выходе инвертора 17 получаем сигнал q). На индикаторе 16 осуществляется визу- альньй контроль перемещения звена 32 в плоскости координат С и X. Так
гросумматор, интегратор и сумматор, другой вход сумматора соединен с выходом второго интегратора блока вращающейся стойки, а выход - с другим 45 входом интегросумматора и первым входом дифференциального усилителя, второй вход которого подключен к выходу датчика момента блока вращающейся стойки, выход дифференциального усили- теля подключен к электромагнитам управляемого электромагнитного тормоза, выход интегратора блока моделирования вращательного движения соединен через , инвертор с первым входом индикатора, блок моделирования поступательного движения, включающий последовательно соединенные блок умножения, интегро- сумматор, интегратор, а также подключенный к второму входу интегросумма50
55
л , м, ся е 10
14448334
изменением коэффициентов на входах блоков 12,13,18 и 21 изменяются динамические параметры моделируемой части робота. Изменение параметров производят, наблюдая jt поведение звена 32 на
экране индикатора 16, например, наблюдая точность позиционирования, время перехода с одного значения в другое и т.д. и определяя желаемое или оптимальное значение в заданной области
возможного метров.
изменения упомянутых пара
Формула изобретения I
Устройство для полунатурного моделирования робота, содержащее блок моделирования вращающейся стойки, cofc- тоящий из первого и второго интеграторов, двигателя, вал которого кинематически связан с редуктором, выходной вал которого является опорным валом блока моделирования вращающейся стойки, датчика момента, датчика ускорения вращения вала, выход которого
через последовательно соединенные первый и второй интеграторы подключен к входу двигателя блока моделирования вращающейся стойки, о т л и 30 чающееся тем, что, с целью расширения функциональных возможностей за счет моделирования .поступательного и вращательного движения робота, оно содержит управляемьй элект35 ромагнитный тормоз, расположенный на опорном валу, дифференциальный усилитель, индикатор, инвертор, блок моделирования вращательного движения, содержащий последовательно соединенные
гросумматор, интегратор и сумматор, другой вход сумматора соединен с выходом второго интегратора блока вращающейся стойки, а выход - с другим 5 входом интегросумматора и первым входом дифференциального усилителя, второй вход которого подключен к выходу датчика момента блока вращающейся стойки, выход дифференциального усили- теля подключен к электромагнитам управляемого электромагнитного тормоза, выход интегратора блока моделирования вращательного движения соединен через , инвертор с первым входом индикатора, блок моделирования поступательного движения, включающий последовательно соединенные блок умножения, интегро- сумматор, интегратор, а также подключенный к второму входу интегросумма0
5
тора источник постоянного напряжения, первый вход блока умножения соединен , с выходом датчика момента блока вращающейся стойки, второй вход блока умножения соединен с выходом интегро37
J
Фие.1
сумматора блока моделирования поступательного движения, выход интегратора блока моделирования поступательного движения подключен к второму входу индикатора.
зг
| Устройство для моделирования ротор-НыХ СиСТЕМ | 1979 |
|
SU822221A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1983 |
|
SU1113817A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
