ii
Изобретение относится к аналоговой вычислительной технике и может быть применено для автоматизированиого проектирования приводов кооринатно-шлифовальных станков.
Известно устройство для полунатурного моделирования механических колебательных систем, содержащее возбудитель крутильных колебаний, атчик момента, закрепленные на вау машины, а также вычислительное стройство, моделирующее характерисику асинхронного двигателя, к вхоу которого подключен выход момента, а выход подключен к входу возбудителя колебаний 11.
Однако, так как от непрерывного вращательного движения звеньев привода планетарного движения координатно-шлифовального станка зависит процесс резания обрабатываемой поверхности детали, взаимосвязь модеируемого привода с машиной не моет быть осуществлена с помощью возбудителя крутильных колебаний. Кроме того, из-за того, что при резании проявляются различные физические процессы, в частности эффект нелинейной характеристики силы резания от скорости резания, в привод планетарного движения необходимо вводить дополнительные инерционные злементы, а также должна быть осуществлена возможность оценить влияние конструктивных свойств механизма привода на процесс обработки, что не позволяет осуществить используемое вычислительное устройство, т.е. известное устройство не может быть применено для полунатурного . моделирования координатно-шлифовального станка.
.
Наиболее близким техническим решением к изобретению является устройство для моделирования статичес-г ких и динамических характеристик привода, содержащее двигатель постоянного тока, на валу которого установлен блок моделирования внешнего момента сопротивления привода, выполненный в виде преобразователя угла поворота в напряжение, первый, второй и третий интеграторы, первый сумматор, блок моделирования холостого хода привода, выполненный в виде источника постоянного напряжения, выход которого подключен к первому входу первого сумматора.
13817а
выход которого соединен с входом первого интегратора, выход второго интегратора подключен к управляющему входу двигателя постоянно5 го тока (2.
Недостатки данного устройства обусловлены низкой точностью моделирования и ограниченными функциональи 1ми возможностями.
10.
Цель изобретения - повьшение точности и расширение функциональных возможностей за счет учета моментов сопротивления от внешней наг,5 рузки.
Поставленная цель достигается тем, что в устройство, содержащее двигатель постоянного тока, на валу которого установлен блок модед лирования внешнего момента сопротивления привода, выполненный в виде преобразователя угла поворцта в напряжение, первый, второй и третий интеграторы, первый сумматор,
5 блок моделирования холостого хода привода, выполненный в виде источника постоянного напряжения, выход которого подключен к первому входу первого сумматора, выход которого
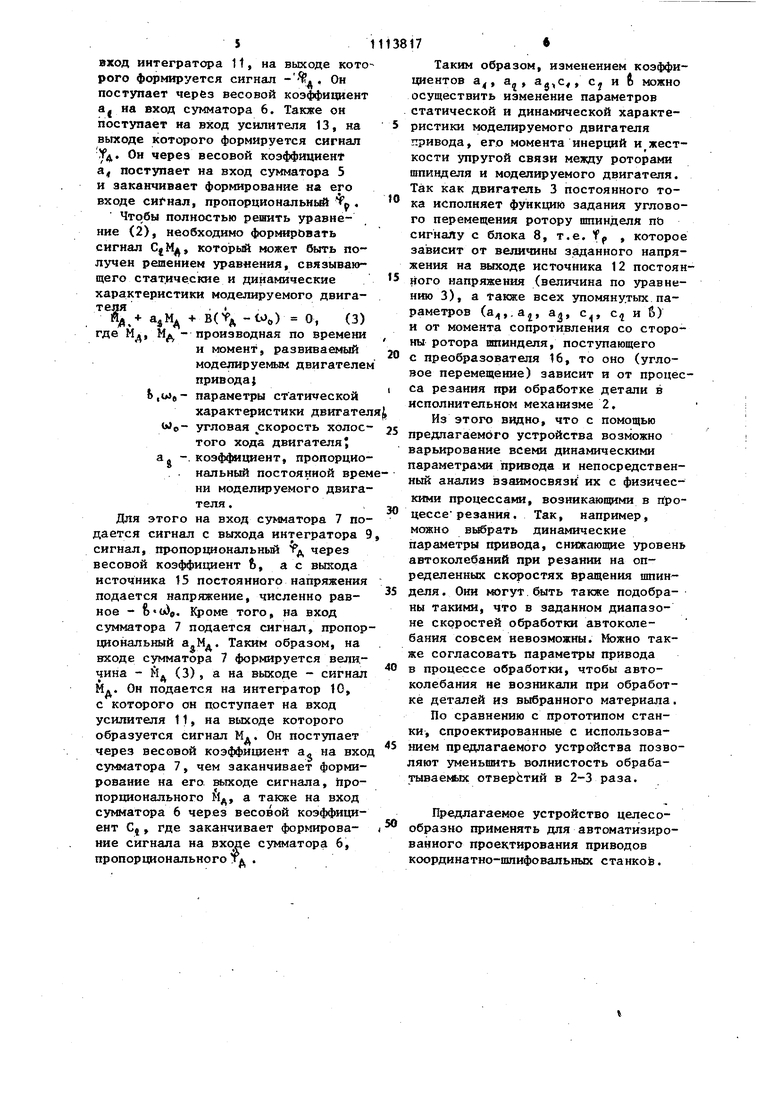
JJ соединен с входом первого интегра тора, выход второго интегратора подключен к управляющему входу двигателя постоянного тока, введены два сумматора, четвертый интегратор, три усилителя и блок моделн рования внешней нагрузки, состоя- . щий из ременной передачи, соединенной с. ротором шпинделя координатнопитифовального станка, на выходном валу которого закреплен исполнительный механизм, выход преобразователя угла поворота в напряжение подключен к первому входу второго сумматора, выход которого соединен с входом второго интегратора, выход которого через первый усилитель соединен с вторым входом второго сумматора и непосредственно соединен с первым входом третьего сумматора, выход которого подключен к входу третьего интегратора, выход которого соединен с вторым входом первого сумматора, с третьим входом второго сумматора и с входом четвертого интегратора, выход которого непосредственно подключен к второму входу третьего сумматора и через второй усилитель соединен с четвертым входом второго сумматоpa, выход первого интегратора через третий усилитель соединен с третьими входами первого и третьего сумматоров. На чертеже изображено предлагае мое устройство. Устройство содержит координатно шлифовальный станок 1, исполнитель ный механизм 2, двигатель 3 постоя ного тока, ременную передачу 4, сумматоры 5, 6 и 7, интеграторы « 8-11, усилители 12, 13 и 14, блок моделирования холостого хода приво да, выполненный в виде источника 15 постоянного напряжения, блок мо делирования внешнего момента сопро тивления привода, выполненный в виде преобразователя 16 угла поворота в напряжение. Устройство работает следующим образрм. Станок 1 и исполнительный механизм 2 в системе являются реальными .Моделированию подвергается привод планетарного движения, т.е. двигатель привода и упругая связь между роторами шпинделя и двигателя. Электродвигатель 3 постоянного тока служит только исполнительным механизмом полунатурной модели и не является составной частью модел руемой части привода. Он с помощью ременной передачи 4 задает-угловое перемещение ротору шпинделя, пропорциональное входному сигналу, поступающему с выхода интегратора 8. Сигнал на выходе интегратора В формируется решением дифференциаль ного уравнения, моделирующего упру гую связь между роторами шпинделя и моделируемого двигателя привода, которое задается в виде - I() С,М,,(П - где fp , f р - скорость и угловое перемещение ротора шпин, деля соответственно; д) (1,- скорость и угловое перемещение ротора моделируемого двигателя привода; а, - коэффициент, пропорцио нальный жесткости упру гой связи между роторами шпинделя и модели руемого двигателя. 174 Момент сопротивления вращению Мд; со стороны ротора шпинделя измеряется с помощью преобразователя 16, работающего, например, на осно тензодатчика, фиксирующего величину скручивания ротора двигателя 3. Сигнал с выхода преобразователя 16 поступает на вход сумматора 5 через весовой коэффициент С (О, на другие входы сумматора 5 подаются сигналы, пропорциональные Тд , а fp и . Поэтому на входе сумматора 5 формируется сигнал, равный YP , а на его выходе - fp , который поступает на вход интегратора 8, на выходе которого формируется сигнал Y и на управляющий вход двигателя 3. Он также поступает на вход усилителя 12, на выходе которого формируется сигнал - Yp, который через весовой коэффициент а,, в качестве сигнала а Yp поступает на вход сумматора 5. Чтобы, решение уравнения (1) происходило приведенным образом, на входы сумматора 5 должны поступить сигналы, пропорциональные, как указывалось, И а,Тд. Чтобы получить упомянутые сигналы, необходимо решить дифференциальное уравнение движения ротора двигателя, которое имеет вид а СГд-Гр) CjM. (2) где Уд - ускорение углового перемещения ротора моделируемого двигателя привода} Мд - движущий момент моделируемого двигателя; I весовой коэффициент , а. - коэффициент, пропорциональный жесткости упругой связи между роторами шпинделя и моделируемого двигателя с учетом момента инерции ротора двигателя. Для этого на вход сумматора 6 подается .сигнал с выхода интегратора 8, пропорциональный величине Yp через весовой коэффициент а (2), а также -а д и С, Мд. При этом на входе сумматора 6 формируется сигнал, равный д , а на его выходе - . Сигнал с выхода сумматора 6 пбступает на вход интегратора 9, на выходе которого образуется сигнал д, который поступает непосредственно на вход сумматора 5, а также на вход интегратора на выходе кото рого формируется сигнал А Он поступает через весовой коэффициент а на вход сумматора 6. Также он поступает на вход усилителя 13, на выходе которого формируется сигнал Уд. Он через весовой коэффициент а поступает на вход сумматора 5 и заканчивает формирование на его входе сигнал, пропорциональный , Чтцбы полностью решить уравнение (2), необходимо формировать сигнал CjMy, который может быть получен решением уравнения, связывающего статические и динамические характеристики моделируемого двигателя .1 -I- В(д -toj О, (3) где Мд, производная по времени и момент, развиваемый моделируемым двигателе привода; Ь ,Ые - параметры статической характеристики двигате Wo- угловая jCKopocTb холос того хода двигателяJ коэффициент, пропорцио нальный постоянной вре ни моделируемого двига теля . этого на вход сумматора 7 по Для сигнал с выхода интегратора дается сигнал, пропорциональный тд через весовой коэффициент 6, ас выхода источника 15 постоянного напряжения подается напряжение, численно равное - . {QpoMS того, на вход сумматора 7 подается сигнал, пропор циональный а.Мд. Таким образом, на входе сумматора 7 формируется величина - М (3) , а на выходе - сигнал Мд. Он подается на интегратор 10, с которого он поступает на вход усилителя 11, на выходе которого образуется сигнал Мд. Он поступает через весовой коэффициент а. на вхо сумматора 7, чем заканчивает формирование на его выходе сигнала, йропорционального Й, а также на вход сумматора 6 через весовой коэффициент Cj, где заканчивает формирование сигнала на входе сумматора 6, пропорционального Тд . 17 Таким образом, изменением козффищентов а. 4 ° . J осуществить изменение параметров статической и динамической характеристики моделируемого двигателя привода, его момента инерции и жесткости упругой связи между роторами шпинделя и моделируемого двигателя. Так как двигатель 3 постоянного тока исполняет функцию задания углового перемещения ротору шпинделя пЬ сигналу с блока 8, т.е. fp , которое зависит от величины заданного напряжения на выходе источника 12 постоянlioro напряжения (величина по уравнению 3), а также всех упомянутых параметров (a,.aj, а, с, с и 6) и от момента сопротивления со стороны ротора шпинделя, поступающего с преобразователя 16, то оно (угловое перемещение) зависит и от процесса резания при обработке детали в исполнительном механизме 2. Из этого видно, что с помощью предлагаемого устройства возможно варьирование всеми динамическими параметрами привода и непосредственный анализ взаимосвязи их с физическими процесса в{, возникающими в процессе-резания. Так, например, можно динамические параметры привода, снижающие уровень автоколебаний при резании на определенных скоростях вращения шпинделя . Они могут. быть также подобраны такими, что в заданном диапазоне скоростей обработки автоколебания совсем невозможны. Можно также согласовать параметры привода в процессе обработки, чтобы автоколебания не возникали при обработке деталей из выбранного материала. По сравнению с прототипом станки, спроектированные с использованием предлагаемого устройства позволяют уменышть волнистость обрабатываеьйк отверстий в 2-3 раза. Предлагаемое устройство целесообразно применять для автоматизированного проектирования приводов координатно-пшифовальных станков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1986 |
|
SU1437884A2 |
| Устройство для полунатурного моделирования червячного привода станка | 1987 |
|
SU1522247A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1986 |
|
SU1314357A1 |
| Устройство для полунатурного моделирования робота | 1986 |
|
SU1444833A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1980 |
|
SU1035618A1 |
| Устройство для испытания электроприводов | 1987 |
|
SU1515314A1 |
| Устройство для моделирования синхронной машины | 1975 |
|
SU527717A2 |
| Устройство для моделирования лентопротяжного механизма | 1982 |
|
SU1070574A1 |
| Устройство для полунатурного моделирования виброударных механических систем | 1983 |
|
SU1251116A1 |
| Устройство для моделирования автоматизированной буровой установки | 1989 |
|
SU1666684A1 |
УСТРОЙСТВО ДЛЯ МОДЕЛИРОBAWW СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПРИВОДА КООРДИНАТНОШШФОВАЛЬНОГО СТАНКА, содержащее двигатель постоянного тока, на валу которого установлен блок моделирования внешнего момента сопротивления привода, выполненный в виде преобразователя угла поворота в напряжение, первый, второй и третий интеграторы, первый сумматор, блок моделирования холостого хода привода, вьтолненный в виде источника постоянного напряжения, выход которого подключен к первому входу первого сумматора, выход которого соединен с входом первого интегратора, выход второго интегратора Подключен к управляющему входу двигателя постоянного тока, отличающееся тем, что, с целью повьпиения точности и расширения функциональных возможностей за счет учета моментов сопротивления от внешней нагрузкэ, в него введены два сумматора, четвертый интегратор, три усилителя и блок моделирования внешней нагрузки, состоящий 43 ременнЫ) передачи, соединенной с ротором шпинделя координатно-шлифовального станка, на выходном валу которого закреплен исполнительный механизм, выход преобразователя угпа поворота в напряжение подключен к первому входу второго сумматора, выход которого соединен с входом второго интегратора, выход которого через первый усилитель соединен с вторым входом сумматора и непосредственно соединен с первым входом третьего сумматора, выход которого подключен к входу третьего интегратора, выход которого соединен с вторым входом первого сумматора, с третьим входом второСО го сумматора и с входом четвертого эо интегратора, выход которого непосредственно подключен к второму входу третьего сумматора и через второй усилитель соединен с четвертым входом второго сумматора, выход первого интегратора через третий усилитель соединен с третьими входами первого и третьего сумматоров.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для моделирования виброзащиты оператора | 1979 |
|
SU864304A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| . | |||
