Известные фотоэлектрические следящие системы для квадратного и квадратно-гнездового посева и посадки без применения мерной проволоки не позволяют получить точное расположение гнезд растений по углам квадрата.
В предлагаемой фотоэлектрической следящей системе для квадратного и квадратно-гнездового посева и посадки пропашных культур без мерной проволоки, с целью получения более точного расположения поперечных рядков при посеве, применено автоматическое регулирование величины расстояния между рядками (открытие клапанов) по заданной величине несовпадений между рядками путем установки ротора, приводимого в движение от полевого колеса и создающего дополнительную угловую скорость вращения через дифференциал для устранения этих отклонений.
Нанесение меток на ноле производится устройством, обеспечивающим синхронное раскладывание белого сыпучего материала на линии высева, который воздействует отраженным светом на фотоэлектрический приемник.
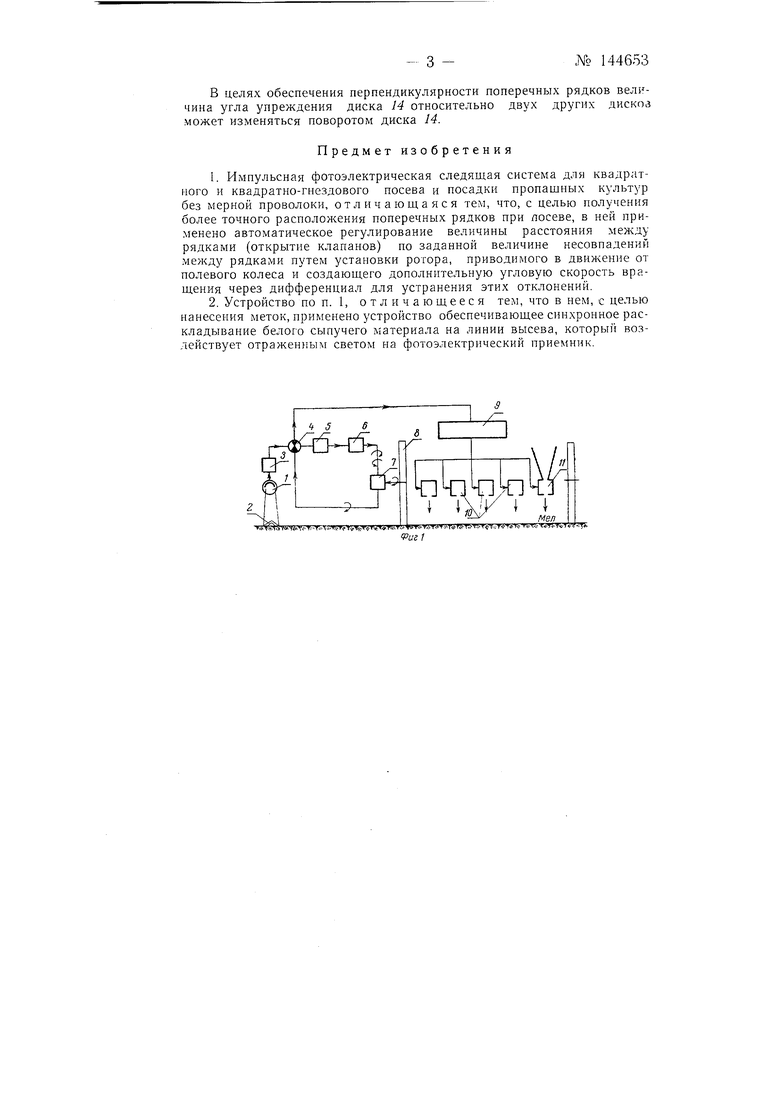
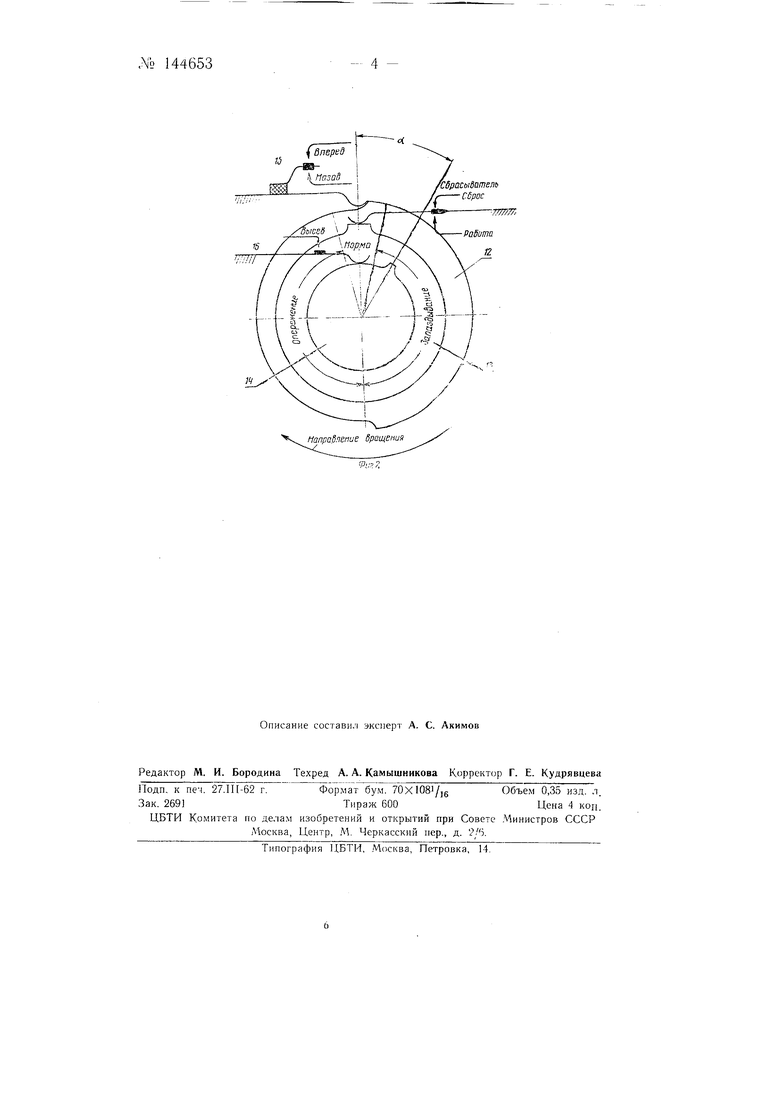
На фиг. 1 изображена блок-схема предложенной импульсной системы; на фиг. 2-схема ротора.
Импульсная фотоэлектрическая следящая система для квадратного и квадратно-гнездового посева и посадки пропащных культур без мерной проволоки состоит: из фотоэлемента / вакуумного типа, реагируюш,его на белые пятна 2, выполненные, например, из мела; импульсного усилителя 3, выполненного на двух двойных триодах; ротора 4 для оценки величины смещения меток, нанесенных на поверхности поля при данном проходе сеялки, относительно меток, нанесенных при предыдущем проходе сеялки; релейной системы 5: следящего двигателя 6
№ 144653- 2 дифференциала 7, приводимого в движение от ходового колеса 8; исполнительного устройства 9: высевающих аппаратов JO сеялки; высевающего мел аппарата 11.
Ротор состоит из трех дисков 12, 13 н 14 с угловым С1мещением контактных устройств для подачи импульсов в исполнительное устройство.
Работа сеялки, оборудованной предложенной импульсной фотомектрической следящей системой, происходит следующим образом.
Высев продольных рядков в первом рабочем проходе и в следующих проходах производится от полевого колеса сеялки. При втором рабочем проходе сеялки, с целью обеспечения правильности поперечных рядков, вводится автоматическая коррекция расстояний между поперечными рядками. Управляющим воздействием для этой коррекции служат импульсы естественного или искусственного света, отраженного метками светлого сыпучего материала, например мела, синхронно раскладываемого сеялкой или сажалкой на линии высева или высадки предыдущего гона, и воспринимаемые фотоэлектрическим приемш;ком при последующем гоне.
При движении сеялки вдоль меток, разложенных мащиной на предыдущем гоне, можно различить следующие случаи: оперелсение, .запаздывание и норма.
В случае опережения-высев происходит преждевременно, до мо.мента поступления импульса света от %1етки. В этом случае протяженность следующего междугнездия должна быть увеличена на величину смещения.
В случае запаздывания высев происходит после поступления импульса. Коррекция при этом должна продолжаться до момента следующего высева и привести к укорочению щага на величину смещения.
При нормально. высеве, т. е. при высеве строго на линии поперечного рядка, коррекция не вводится. Фотоэлектрический импульс, воспринятый фотоэлементом / и усиленный импульсным усилителем 3, поступает на ротор 4, выполненный в виде коммутатора. Ротор 4 связан через дифференциал 7 с ходовым колесом 8 сеялки и со следящим двигателем 6- Ротор 4 производит оценку смещения и определяет величину и знак смещения. С ротора снимаются сигналы для управления исполнительным устройством Я приводящим в действие высевающие аппараты 10 сеялки.
В результате анализа величины и знака смещения с помощью релейной систелмы 5 производится управление следящим двигателем 6, который, воздействуя на ротор через редуктор и дифференциал, осуществляет главную обратную связь следящей системы, приводя абсолютную величину смещения в пределы нормы.
Ротор 4 состоит из трех жестко скрепленных между собой фигурных дисков. С помощью дифференциального механизма ротор получает алгебраическую сумму угловых скоростей от ходового колеса и от следящего двигателя через редуктор. Наличие смещения, превосходящего заданную допустимую величину, определяется диском 13, замыкающим контакт «Сброс (смещение меньше нормы) и «Работа (смещение больще нормы). Диск 12 управляет контактами переключателя 15 направления движения, подготавливающего в релейной схеме цепи включение коррекции: на укорочение щага в случае запаздывания контакт «Вперед и на удлинение щага в случае опережения контакт «Назад.
Диск 14 замыкает команди-контакт 16 «Высев, который через реле-контактор в релейной схеме исполнительного устройства вызывает срабатывание исполнительного устройства, выполненного в виде электромагнита.
В целях обеспечения перпендикулярности поперечных рядков величина угла упреждения диска 14 относительно двух других дискоз может изменяться поворотом диска 14.
Предмет изобретения
1. Импульсная фотоэлектрическая следящая система для квадратного и квадратно-гнездового посева и посадки пропашных культур без мерной проволоки, отличающаяся тем, что, с целью получения более точного расположения поперечных рядков при посеве, в ней применено автоматическое регулирование величины расстояния между рядками (открытие клапанов) по заданной величине несовпадений между рядками путем установки ротора, приводимого в движение от полевого колеса и создающего дополнительную угловую скорость вращения через дифференциал для устранения этих отклонений.
2. Устройство по п. 1, отличающееся тем, что в нем, с целью нанесения меток, применено устройство обеспечивающее синхронное раскладывание белого сыпучего материала на линии высева, который воздействует отраженным светом на фотоэлектрический приемник.
...т,.,..f
I II /
L Vui Г
