ел
4
СО
10
Изобретение относится к автоматике и вычислительной технике, в частности к методам и средствам измерения координат объекта, основанным на измерении времени распространения акустической волны, например, в воздушной среде.
Целью изобретения является повышение точности способа, а также упрощение устройства и повышение точности за счет использования фазового метода коррекции.
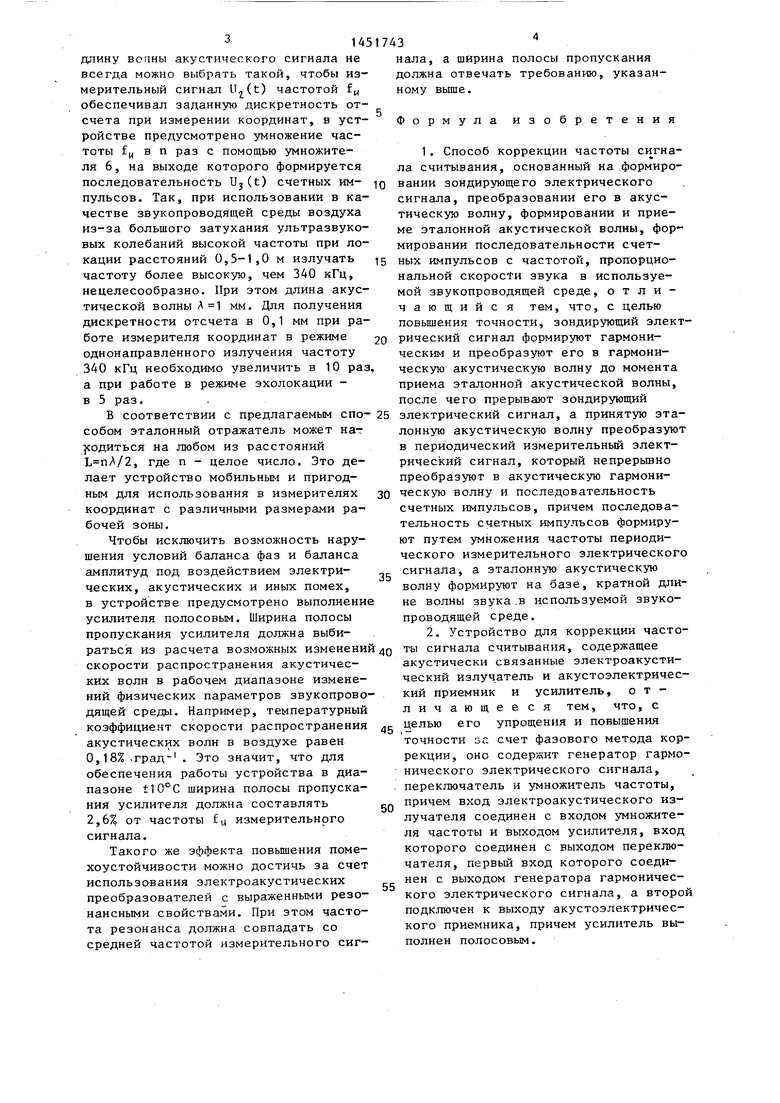
На фиг. 1 приведена структурная схема устройства для осуществления 15 способа (режим эхолокации) на фиг.2- временные диаграммы, поясняющие работу устройства.
В соответствии с предлагаемым способом коррекции влияния изменений 20 физических параметров звукопроводящей среды на точность считывания координат акустическим методом формируют зондирующий гармонический электри1451743
чатель 2, усилитель 3, электроакустический излучатель 4, акустоэлектри- ческий приемник 5, акустически через отражатель связанный с электроакустическим излучателем 4, а выходом соединенный с другим входом усилителя 3, и умножитель 6 частоты, входом соединенный с выходом усилителя 3, а.выходом - с выходом устройства.
Устройство работает следующим образом.
При включении питания начинает работать в автоколебательном режиме генератор 1 гармонического электрического сигнала. При включении в некоторый момент времени t, переключателя 2 на один из входов усилителя 3 начинает поступать гармонический электрический сигнал U,(t) частоты fj, с выхода генератора 1, который преобразуется с помощью усилителя 3 и излучающего электроакустического преобразователя 4 в акустические волны
ческий сигнал U,(t) (фиг.2), преобра-25 длиной , излучаемые в сторону
эталонного отражателя. Расстояние между приемно-излучающим модулем (элементы 4 и 5) и эталонным отражателем выбрано равным , В результате отраженный сигнал, в момент времени t1 достигающий чувствительной поверхности акустоэлектрического приемника 5 и преобразованный последним в измерительный сигнал U-2.(t), на вход усилителя приходит синфазно с сигналом U(t). В цепи, образованной усилителем 3, электроакустическим из-- лучателем 4 и акустоэлектрическим приемником 5 и замкнутой по акустическому тракту через эталонный отражатель , начинается автоколебательный процесс. Этот процесс обусловлен тем, что цепь охвачена положительной обратной связью с выхода на вход (обеспечено условие баланса фаз), а также тем, что величина обратной связи с помощью усилителя 3 выбрана достаточной для поддержания в схеме изменений напряжений и токов по закону, свойственному этой схеме, сколь угодно длительное время (выполнено условие баланса амплитуд). После захвата частоты fц, навязанной этой цепи генератором Г, переключатель 2 выключают. Частота ft, измерительного сигнала U,,(t) устанавливается равной с// и постоянно меняется в соответствии с изменениями скорости с распространения акустических волн. Поскольку
зуют его в акустические волны, излучают гармонические акустические волны в первой фиксированной точке до тех. пор, пока они не достигнут второй фиксированной точки или путем прямого прохождения от первой точки до второй (режим однонаправленного излучения), или отразившись от эталонного отражателя (режим эхолокации, фиг. 1), преобразуют акустичес- кие волны, принятые во второй фиксированной точке, в электрический измерительный сигнал Ui(t), непрерыв- . но преобразуют его в акустические гармонические волны, излучаемые в первой фиксированной точке, и последовательность счетных импульсов высокой частоты f, используемых для время-импульсного преобразования при измерении координат, формируют путем умножения частоты „ измерительного- сигнала U4(t) в п раз, причем расстояние между первой и второй фиксированными точками в режиме однонаправленного излучения устанавливают
равным , а расстояние между эталонным отражателем и фиксированными точками при эхолокации (фиг.1) устанавливают равным пА/2.
Устройство (фиг.1) для осуществле ния способа содержит последовательно соединенные генератор 1 гармонического электрического сигнала, переклю
25 длиной , излучаемые в сторону
30
2 до 45
50
55
эталонного отражателя. Расстояние между приемно-излучающим модулем (элементы 4 и 5) и эталонным отражателем выбрано равным , В результате отраженный сигнал, в момент времени t1 достигающий чувствительной поверхности акустоэлектрического приемника 5 и преобразованный последним в измерительный сигнал U-2.(t), на вход усилителя приходит синфазно с сигналом U(t). В цепи, образованной усилителем 3, электроакустическим из-- лучателем 4 и акустоэлектрическим приемником 5 и замкнутой по акустическому тракту через эталонный отражатель , начинается автоколебательный процесс. Этот процесс обусловлен тем, что цепь охвачена положительной обратной связью с выхода на вход (обеспечено условие баланса фаз), а также тем, что величина обратной связи с помощью усилителя 3 выбрана достаточной для поддержания в схеме изменений напряжений и токов по закону, свойственному этой схеме, сколь угодно длительное время (выполнено условие баланса амплитуд). После захвата частоты fц, навязанной этой цепи генератором Г, переключатель 2 выключают. Частота ft, измерительного сигнала U,,(t) устанавливается равной с// и постоянно меняется в соответствии с изменениями скорости с распространения акустических волн. Поскольку
длину вопны акустического сигнала не всегда можно выбрать такой, чтобы измерительный сигнал U(t) частотой „ обеспечивал заданную дискретность отсчета при измерении координат, в устройстве предусмотрено умножение частоты fp, в п раз с помощью умножителя 6, на выходе которого формируется последовательность Uj(t) счетных им- пульсов. Так, при использовании в качестве звукопроводящей среды воздуха из-за большого затухания ультразвуковых колебаний высокой частоты при локации расстояний 0,5-1,0 м излучать частоту более высокую, чем 340 кГц, нецелесообразно. При этом длина акустической волны мм. Для получения дискретности отсчета в 0,1 мм при работе измерителя координат в режиме однонаправленного излучения частоту 340 кГц необходимо увеличить в 10 раз а при работе в режиме эхолокации - в 5 раз.
нала, а ширина полосы пропускания должна отвечать требованию, указанному выше.
Формула изобретения
1. Способ коррекции частоты сигнала считывания, основанный на формировании зондирующего электрического сигнала, преобразовании его в акустическую волну, формировании и приеме эталонной акустической волны, фор мировании последовательности счетных импульсов с частотой, пропорциональной скорос и звука в используемой звукопроводящей среде, отличающийся тем, что, с целью повышения точности, зондирующий элекрический сигнал формируют гармоническим и преобразуют его в гармоническую акустическую волну до момента приема эталонной акустической волны, после чего прерывают зондирующий
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1976 |
|
SU634315A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1297087A1 |
| Устройство для считывания графической информации | 1980 |
|
SU934514A1 |
| Ультразвуковое устройство для измерения толщины изделий | 1988 |
|
SU1582007A1 |
| Ультразвуковое устройство для измерения контактных давлений | 1990 |
|
SU1746297A1 |
| Устройство для градуировки электроакустических преобразователей | 2020 |
|
RU2782354C2 |
| МНОГОЧАСТОТНОЕ ПРИЕМОИЗЛУЧАЮЩЕЕ АНТЕННОЕ УСТРОЙСТВО | 2018 |
|
RU2700031C1 |
| Стенд для испытаний промышленных роботов | 1988 |
|
SU1678604A1 |
| Способ определения скорости распространения звука в среде и вектора скорости движения среды и устройство для его осуществления | 1983 |
|
SU1293492A1 |
| ГИДРОАКУСТИЧЕСКИЙ АВТОНОМНЫЙ ВОЛНОГРАФ | 2011 |
|
RU2484428C2 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в устройствах измерения координат объекта. Целью изобретения является повышение точности способа, а также повышение точности и упрощение устройства за счет использования фазового метода коррекции частоты локационного сигнала. Поставленная цель достигается тем, что формируют зондирующий гармонический электрический сигнал, преобразуют его в гармоническую акустическую волну, формируют эталонную акустическую волну, прерывают зондирующий гармонический электрический сигнал, а эталонную акустическую волну преобразуют в периодический измерительный электрический сигнал, по которому непрерывно формируют акустическую гармоническую волну и последовательность счетных импульсов. Устройство содержит электроакустический излучатель, акустоэлектрический приемник, усилитель, переключатель и умножитель частоты. Использование фазового метода коррекции позволяет не только достичь высокой точности, но и надежно в реализации. 2 с.п. ф-лы, 2 ил. с (Л с
В соответствии с предлагаемым спо- 25 электрический сигнал, а принятую этасобом эталонный отражатель может нат родиться на любом из расстояний , где п - целое число. Это делает устройство мобильным и пригодным для использования в измерителях координат с различными размерами ра- бочей зоны.
Чтобы исключить возможность нарушения условий баланса фаз и баланса амплитуд под воздействием электрических, акустических и иных помех, в устройстве предусмотрено выполнени усилителя полосовым. Ширина полосы пропускания усилителя должна выбираться из расчета возможных изменений 40 ты сигнала считывания, содержащее
акустически связанные электроакуст ческий излучатель и акустоэлектрич кий приемник и усилитель, отличающее ся тем, что, с целью его упрощения и повышения точности за счет фазового метода к рекции, оно содержит генератор гар нического электрического сигнала, переключатель и умножитель частоты причем вход электроакустического и лучателя соединен с входом умножит ля частоты и выходом усилителя, вх которого соединен с выходом перекл чателя, первый вход которого соеди нен с выходом генератора гармониче кого электрического сигнала, а вто подключен к выходу акустоэлектриче кого приемника, причем усилитель в полнен полосовым.
скорости распространения акустических волн в рабочем диапазоне изменений физических параметров звукопроводящей среды. Например, температурный коэффициент скорости распространения акустических волн в воздухе равен 0,18% .град- . Это значит, что для обеспечения работы устройства в диапазоне tlO°C ширина полосы пропускания усилителя должна составлять 2,6% от частоты fu измерительного сигнала.
Такого же эффекта повьшения помехоустойчивости можно достичь за счет использования электроакустических преобразователей с выраженными резонансными свойствами. При этом частота резонанса должна совпадать со средней частотой измерительного сиг0
5
лонную акустическую волну преобразуют в периодический измерительный электрический сигнал, который непрерьшно преобразуют в акустическую гармоническую волну и последовательность счетных импульсов, причем последовательность счетных импульсов формируют путем умножения частоты периодического измерительного электрического сигнала, а эталонную акустическую волну формируют на базе, кратной длине волны звука .в используемой звукопроводящей среде.
. i
акустически связанные электроакустический излучатель и акустоэлектричес- кий приемник и усилитель, отличающее ся тем, что, с целью его упрощения и повышения точности за счет фазового метода коррекции, оно содержит генератор гармонического электрического сигнала, переключатель и умножитель частоты, причем вход электроакустического излучателя соединен с входом умножителя частоты и выходом усилителя, вход которого соединен с выходом переключателя, первый вход которого соединен с выходом генератора гармонического электрического сигнала, а второй подключен к выходу акустоэлектричес- кого приемника, причем усилитель выполнен полосовым.
Фив. I
Фиг.1
| Устройство для считывания графической информации | 1977 |
|
SU739579A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для считывания графической информации | 1974 |
|
SU525976A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
