1-ш
Изобретение относится к машиностроению и может быть использовано при экспериментальных исследованиях, диагностировании и аттестации промышленных роботов.,
Целью изобретения является повышение точности измерений и упрощение обработки информации.
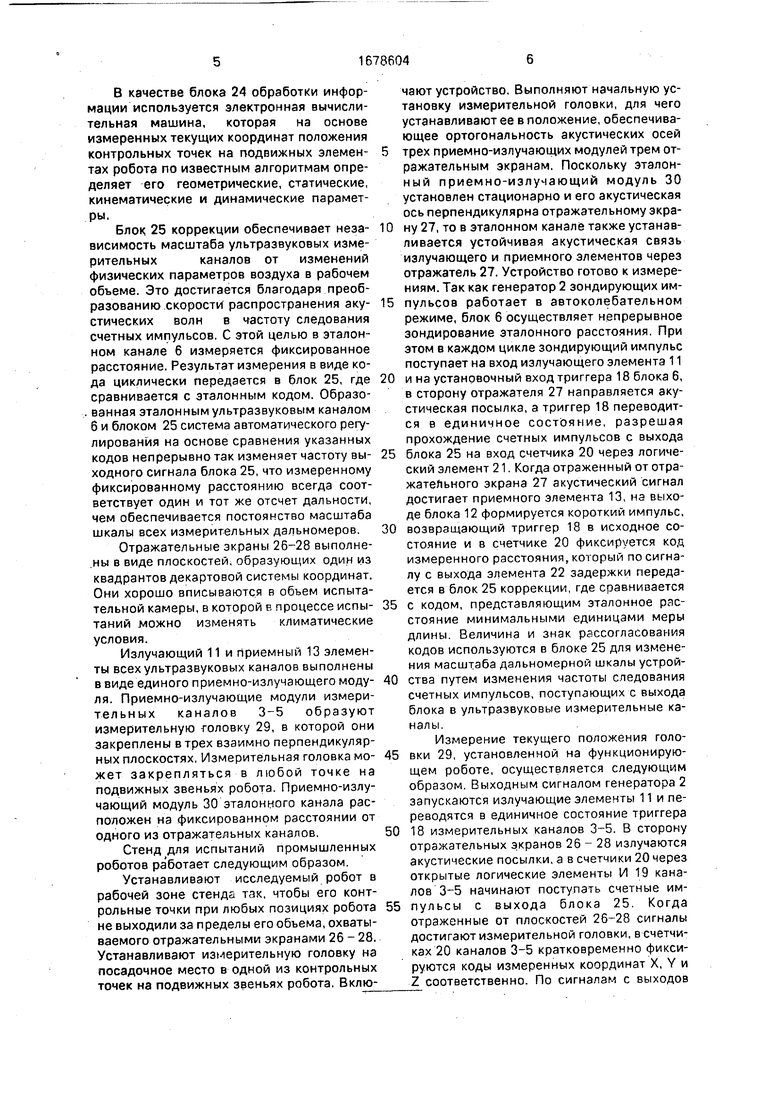
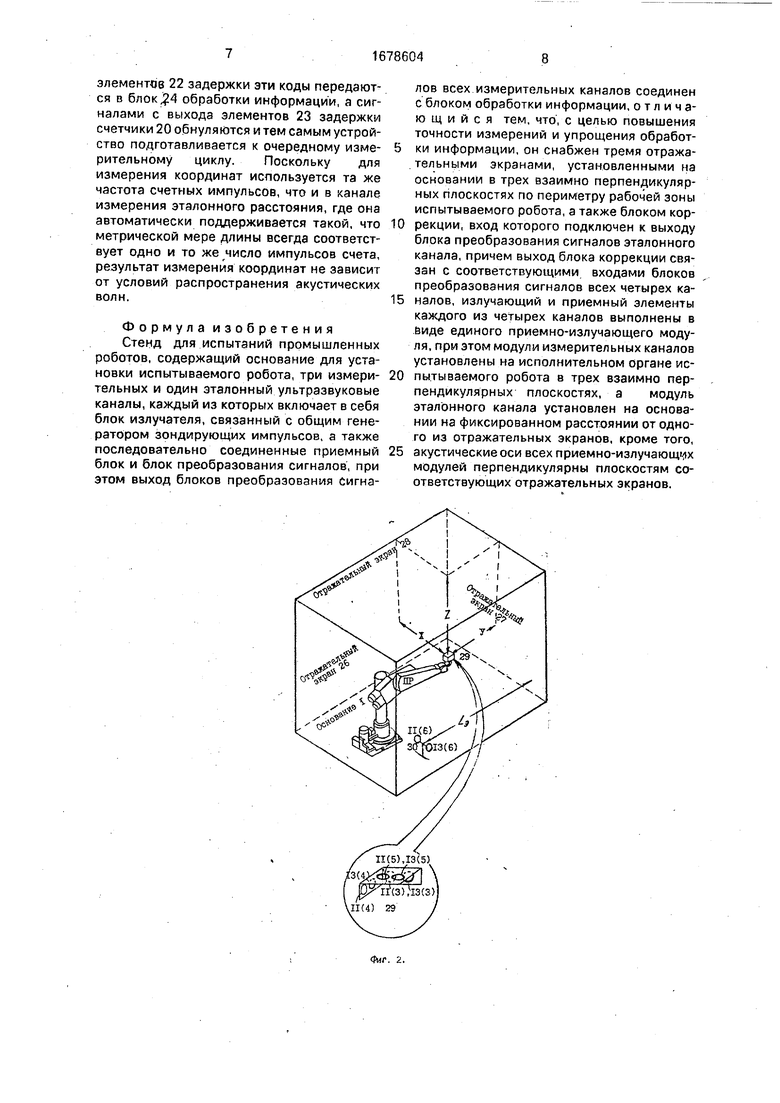
Па фиг, I приведена структурная электрическая схема испытательного стенда; на фиг,2 - промышленный робот, конструкция трех отражательных экранов,
В качестве отражательных экранов могут использоваться взаимно ортогональные стенки испытательной камеры, обеспечива- ющие реализацию режима эхолокации и получение отсчетов в декартовой системе координат.
Стенд для испытаний промышленных роботов содержит основание 1 для установ- ки исследуемого робота, генератор 2 зондирующих импульсов, измерительные 3-5 и эталонный 6 ультразвуковые каналы, каждый из которых включает в себя блок 7 излучателя, связанный с общим генератором зондирующих импульсов и состоящий из последовательно соединенных генератора 8 ультразвуковой несущей частоты, модулятора 9, согласующего усилителя 10 и излучающего элемента 11, а также приемный блок 12, состоящий из последовательно включенных приемного элемента 13, предваритель- ного усилителя 14, фильтра 15 и демодулятора 16, и блок 17 преобразования сигналов, состоящий из триггера 18, логиче- ского элемента И 19, счетчика 20, схемы 21 передачи кодов и элементов 22 и 23 задержки, блок 24 обработки информации, блок 25 коррекции и отражательные экраны 26- 28, причем выход блоков преобразования сигналов всех измерительных каналов соединен с блоком обработки информации, а выход блока преобразования сигналов эталонного канала - с входом блока коррекции, выход которого связан с соответствующими входами блоков преобразования сигналов всех четырех каналов, отражательные экраны 26 - 28 установлены на основании в трех взаима перпендикулярных плоскостях по периметру рабочей зоны испытываемого робота, излучающий и приемный элементы каждого из четырех каналов выполнены в виде единого приемно-излучающего модуля, при этом модули измерительных каналов собраны в единую конструкцию (измерительную головку), в которой они закреплены в трех взаимно перпендикулярных плоскостях, измерительная головка имеет средства крепления ее на подвижных звеньях робота, модуль эталонного канала устанавливается
нз основании на фиксированном расстоянии от одного из отражательных экранов, кроме того, акустические оси асех приемно- излучающих модулей перпендикулярны плоскостям соответствующих отражательных экранов.
Жесткое основание 1 предназначено для установки исследуемого робота и служит опорой для конструкции из трех отражательных экранов или испытательной камеры в целом. Генератор 2 зондирующих импульсов формирует импульсы запуска ультразвуковых каналов, Он работает в автоколебательном режиме или по управляющим командам из блока обработки информации.
Измерительные 3-5 и эталонный 6 ультразвуковые каналы являются цифровыми акустическими дальномерами, которые определяют расстояние в воздушной среде на основе измерения времени распространения акустических волн от момента их излучения 5 до момента приема первого эхо-сигнала. В момент излучения акустического сигнала начинается счет импульсов высокой частоты, а в момент приема прекращается. Число записанных импульсов, пропорциональное измеряемому расстоянию, в виде кода в каждом измерительном цикле передается в блок обработки информации. Каждый из дальномеров вкпючает в себя блок 7 излучателя, приемный блок 12 и блок 19 преобразования сигналов.
Основными компонентами блока 7 каждого из каналов в случае реализации импульсного способа локации является генератор 8 несущей ультразвуковой частоты, модулятор 9, преобразующий зондирующий импульс в радиоимпульс ультразвуковой частоты и усилитель 10 с излучающим элементом 11, обеспечивающие формирование короткой ультразвуковой посылки.
Приемный блок 12 содержит соответственно приемный элемент 13, предварительный усилитель 14, фильтр 15, настроенный на несущую частоту, и демодулятор 16, обеспечивающий формирование короткого импульса останова счета в блоке 17.
Блок 17 преобразования сигналов выполняет функцию измерителя временных интервалов и содержит триггер 18, формирующий импульс с длительностью, пропорциональной измеряемой дальности, логический элемент И 19, пропускающий импульсы счета в счетчик 20 лишь при наличии разрешающего потенциала на выходе триггера, схему 21 передачи кодов и элементы 22 и 23 задержки, обеспечивающие перезапись кода счетчика в блок обработки информации и последующее обнуление счетчика.
В качестве блока 24 обработки информации используется электронная вычислительная машина, которая на основе измеренных текущих координат положения контрольных точек на подвижных элемен- тах робота по известным алгоритмам определяет его геометрические, статические, кинематические и динамические параметры.
Блок 25 коррекции обеспечивает неза- висимость масштаба ультразвуковых измерительныхканалов от изменений физических параметров воздуха в рабочем объеме. Это достигается благодаря преобразованию скорости распространения аку- стических волн в частоту следования счетных импульсов. С этой целью в эталонном канале 6 измеряется фиксированное расстояние. Результат измерения в виде кода циклически передается в блок 25, где сравнивается с эталонным кодом. Образо- . ванная эталонным ультразвуковым каналом б и блоком 25 система автоматического регулирования на основе сравнения указанных кодов непрерывно так изменяет частоту вы- ходного сигнала блока 25, что измеренному фиксированному расстоянию всегда соответствует один и тот же отсчет дальности, чем обеспечивается постоянство масштаба шкалы всех измерительных дальномеров.
Отражательные экраны 26-28 выполнены в виде плоскостей, образующих один из квадрантов декартовой системы координат. Они хорошо вписываются в объем испытательной камеры, в которой Р процессе испы- таний можно изменять климатические условия.
Излучающий 11 и приемный 13 элементы всех ультразвуковых каналов выполнены в виде единого приемно-излучающего моду- ля. Приемно-излучающие модули измерительных каналов 3-5 образуют измерительную головку 29, в которой они закреплены в трех взаимно перпендикулярных плоскостях. Измерительная головка мо- жет закрепляться в любой точке на подвижных звеньях робота. Приемно-излу- чающий модуль 30 эталонного канала расположен на фиксированном расстоянии от одного из отражательных каналов.
Стенд для испытаний промышленных роботов работает следующим образом
Устанавливают исследуемый робот в рабочей зоне стенда так, чтобы его контрольные точки при любых позициях робота не выходили за пределы его объема, охватываемого отражательными экранами 26 - 28. Устанавливают измерительную головку на посадочное место в одной из контрольных точек на подвижных звеньях робота. Включают устройство. Выполняют начальную установку измерительной головки, для чего устанавливают ее в положение, обеспечивающее ортогональность акустических осей трех приемно-излучающих модулей трем отражательным экранам. Поскольку эталонный приемно-излучающий модуль 30 установлен стационарно и его акустическая ось перпендикулярна отражательному экрану 27, то в эталонном канале также устанавливается устойчивая акустическая связь излучающего и приемного элементов через отражатель 27. Устройство готово к измерениям. Так как генератор 2 зондирующих импульсов работает в автоколебательном режиме, блок 6 осуществляет непрерывное зондирование эталонного расстояния. При этом в каждом цикле зондирующий импульс поступает на вход излучающего элемента 11 и на установочный вход триггера 18 блока 6, в сторону отражателя 27 направляется акустическая посылка, а триггер 18 переводится в единичное состояние, разрешая прохождение счетных импульсов с выхода блока 25 на вход счетчика 20 через логический элемент 21 Когда отраженный от отражательного экрана 27 акустический сигнал достигает приемного элемента 13, на выходе блока 12 формируется короткий импульс, возвращающий триггер 18 в исходное состояние и в счетчике 20 фиксируется код измеренного расстояния, который по сигналу с выхода элемента 22 задержки передается в блок 25 коррекции, где сравнивается с кодом, представляющим эталонное расстояние минимальными единицами меры длины Величина и знак рассогласования кодов используются в блоке 25 для изменения масштаба дальномерной шкалы устройства путем изменения частоты следования счетных импульсов, поступающих с выхода блока в ультразвуковые измерительные каналы
Измерение текущего положения головки 29, установленной на функционирующем роботе, осуществляется следующим образом Выходным сигналом генератора 2 запускаются излучающие элементы 11 и переводятся в единичное состояние триггера 18 измерительных каналов 3-5. В сторону отражательных экранов 26 - 28 излучаются акустические посылки, а в счетчики 20 через открытые логические элементы И 19 каналов начинают поступать счетные импульсы с выхода блока 25 Когда отраженные от плоскостей 26-28 сигналы достигают измерительной головки, в счетчиках 20 каналов 3-5 кратковременно фиксируются коды измеренных координат X, Y и Z соответственно. По сигналам с выходов
элементов 22 задержки эти коды передаются в блок ,24 обработки информации, а сигналами с выхода элементов 23 задержки счетчики 20 обнуляются и тем самым устройство подготавливается к очередному изме- рительному циклу. Поскольку для измерения координат используется та же частота счетных импульсов, что и в канале измерения эталонного расстояния, где она автоматически поддерживается такой, что метрической мере длины всегда соответствует одно и то же число импульсов счета, результат измерения координат не зависит от условий распространения акустических волн.
Формула изобретения Стенд для испытаний промышленных роботов, содержащий основание для установки испытываемого робота, три измери- тельных и один эталонный ультразвуковые каналы, каждый из которых включает в себя блок излучателя, связанный с общим генератором зондирующих импульсов, а также последовательно соединенные приемный блок и блок преобразования сигналов, при этом выход блоков преобразования сигналов всех измерительных каналов соединен с блоком обработки информации, отличающийся тем, что, с целью повышения точности измерений и упрощения обработки информации, он снабжен тремя отражательными экранами, установленными на основании в трех взаимно перпендикулярных плоскостях по периметру рабочей зоны испытываемого робота, а также блоком коррекции, вход которого подключен к выходу блока преобразования сигналов эталонного канала, причем выход блока коррекции связан с соответствующими входами блоков преобразования сигналов всех четырех каналов, излучающий и приемный элементы каждого из четырех каналов выполнены в виде единого приемно-излучающего модуля, при этом модули измерительных каналов установлены на исполнительном органе испытываемого робота в трех взаимно перпендикулярных плоскостях, а модуль эталонного канала установлен на основании на фиксированном расстоянии от одного из отражательных экранов, кроме того, акустические оси всех приемно-излучающ х модулей перпендикулярны плоскостям соответствующих отражательных экранов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1980 |
|
SU934514A1 |
| Устройство для считывания графической информации | 1976 |
|
SU634315A1 |
| Способ определения скорости распространения звука в среде и вектора скорости движения среды и устройство для его осуществления | 1983 |
|
SU1293492A1 |
| Измеритель скорости распространения ультразвуковых колебаний в материалах | 1985 |
|
SU1298643A1 |
| Электроакустическое устройство для определения координат облучателя радиотелескопа | 1991 |
|
SU1795394A1 |
| Устройство для контроля и регистрации нарушений гладкости внутренней поверхности труб и пространственно-геометрических параметров трубопроводов | 1989 |
|
SU1629683A1 |
| Ультразвуковой индикатор уровня | 1976 |
|
SU569861A1 |
| Ультразвуковой эхоимпульсный измеритель размеров | 1987 |
|
SU1467392A1 |
| Устройство для измерения времени распространения ультразвука | 1980 |
|
SU932274A1 |
| Ультразвуковой толщиномер | 1988 |
|
SU1619030A1 |
Изобретение относится к машиностроению и может быть использовано при экспериментальных исследованиях, диагностировании и аттестации промышленных роботов. Цель изобретения - повышение точности измерений и упрощение обработки информации. Устройство содержит гене- ратор 2 зондирующих импульсов, три цифровых акустических измерительных канала 3-5, определяющих расстояния от измерительной головки до трех плоских отражательных экранов, расположенных взаимно ортогонально и образующих один из квадрантов декартовой системы координат, блок 25 автоматической коррекции, обеспечивающий преобразование скорости распространения акустических волн з частоту следования счетных импульсов, сое- диннный с выходом эталонного канала 6, а также блок 24 обработки информации. 2 ил.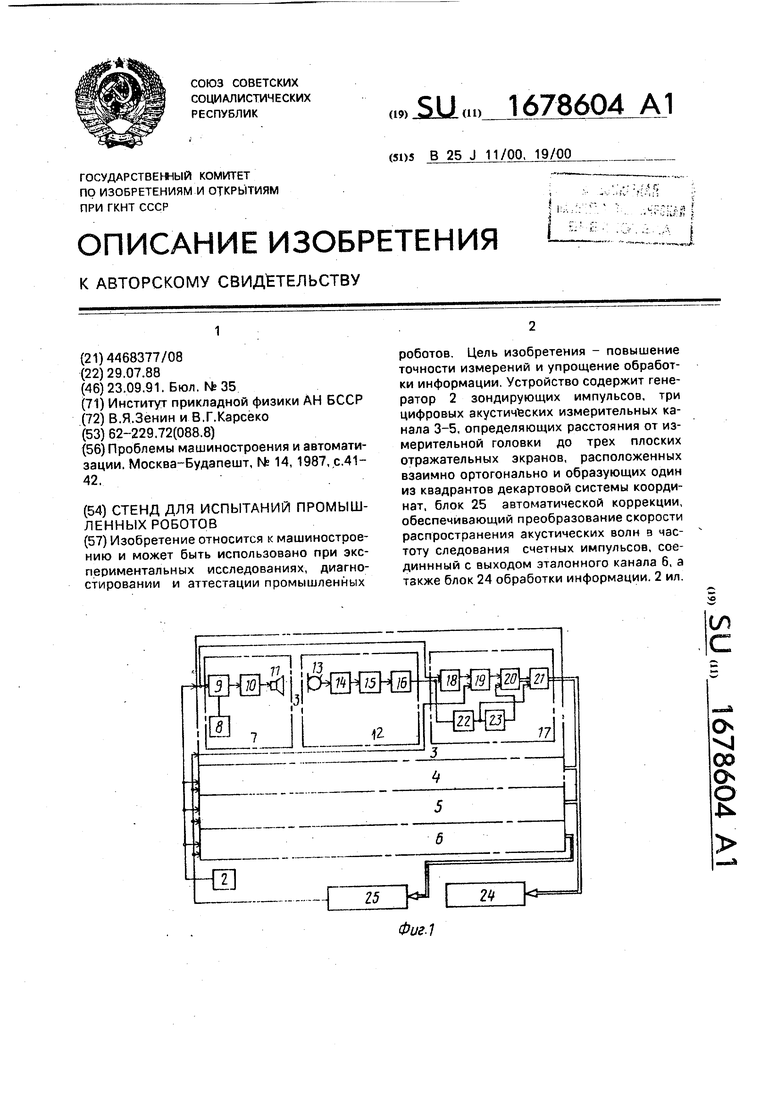
| Проблемы машиностроения и автоматизации | |||
| Москва-Будапешт, NJ 14, 1987, с.41- 42. |
