О1
со
САЭ СД
11
Игшбретенио относится к контрольно-измерительной технике и предназначено для измерения усилия приведения ирисовых пружин электродинамических сейсмоприемников к точке нулевого прогиба и измерения дифференциальной жесткости пружин в этой точке.
Целью изобретения является повышение точности измерения.
На фиг.1 приведена функциональная
схема предл агаемого устройства; на фиг,2 - одна из возможных сХем реа- JIизaции блока управления и временные диаграммы, поясняюище его работу.
Предлагаемое устройство (фиг.1) состоит из источника 1 постоянного тока положительной полярности, идентичного ему источника 2 постоянного тока отрицательной полярности, соединенных ерез замыкающие ключи 3 и 4 соответственно с выводом 5 обмотки 6 и общим контактом перекидного ключа 7о Один из контактов ключа 7 соединен с входом усилителя 8, выход которого .соединен с входами пик-детекторов 9 и 10 импульсов положительной 9 и отрицательной 10 порярности,параллельно запоминающим емкостям кото рых включены ключи 11 и 12 соответственно „ Выходы пик-детекторов 9 и 10 соединены с входами аналогового сумматора 13, выход которого соединен с вольтметром 14 и входом источника 15 тока, управляемого напряжением. Выход последнего соединен с вторым контактом ключа 7, .
Устройство содержит также автогенератор 16, вход которого соединен через ключ 17 с выводом 18 обмотки 19, а выход - с частотомером 20. Все ключи 3, 4, 7, 11, 12 и 17 управляются блоком 21 управления. Электромеханическая колебатгшьная система предлагаемого устройства включает в себя постоянный магнит 22, закрепленный на опоре 23 и удерживающий на весу через постоянно закреплен5 ую пружину 24 катушку 25 с двумя обмотками. Одна обмотка 19 имеет выводы 18 и 26, другая обмотка 6 имеет выводы 5 и 27, Узел фиксации контролируемой пружины с приводом выполнен следующим образом.
На опоре 23 установлен электромагнит 28, который якорем 29 шарнир- но связан с поворотным, рычагом 30, фиксируюп.1им контролируемую пружину 31 по внутреннему посадочному периметру. При этом по наружному поса
0
5
0
5
0
5
0
5
0
5
дочноьгу периметру контролируемая пружина 31 свободно установлена в ршжнем посадочном гнезде катушки 25.
Блок управления (фиг,2) состоит из низкочастотного мультивибратора
32,соединенного с входами триггера
33,работающего в счетном режиме,
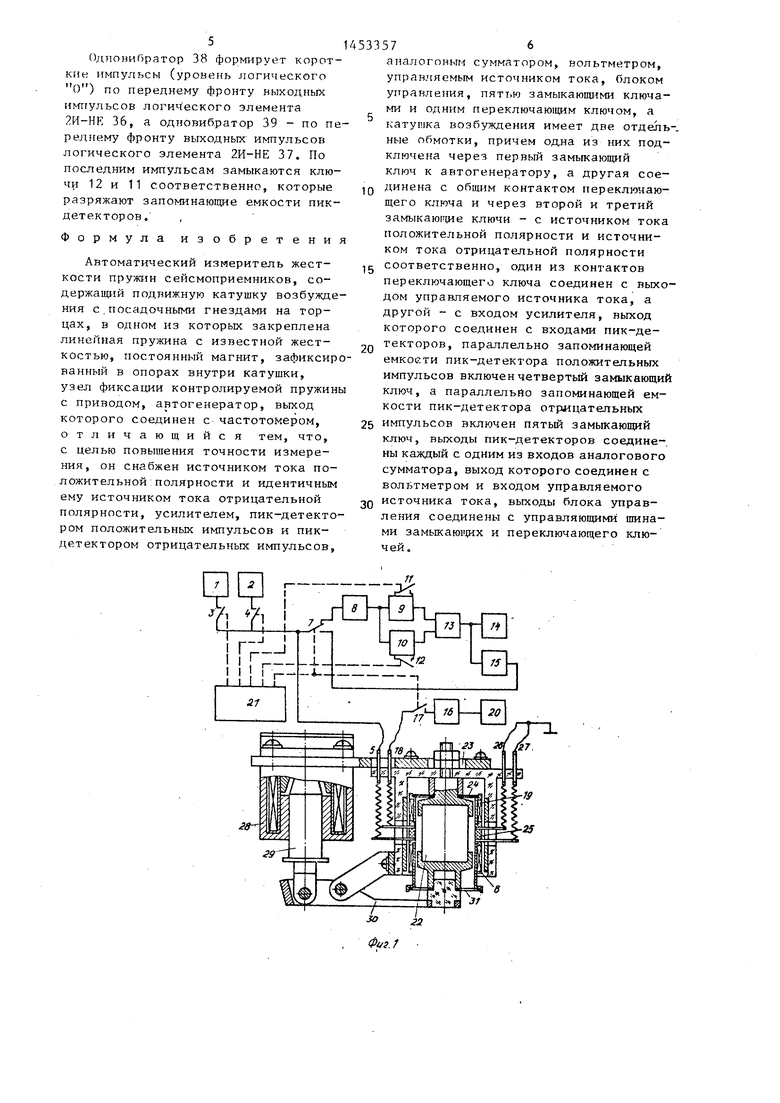
и одновибраторов 34 и 35. Выход триггера 33.соединен с одним из входов логических элементов 2И-НЕ 36 и 37, с другими входами которых соединены выходы одновибраторов 34 и 35 соот ветственно. Выходы логических элементов 36 и 37 соединены с входами одновибраторов 38 и 39 соответственно. Напротив каждого из функциональных элементов 32-39 блока управления на фиг с 2 приведены временные диаграммы соответственно 40-47 их работы. На последней диаграмме 48 показан выходной сигнал обмотки 6 катушки колебательной системы устройства при возбуждении ее положительными 48 и отрицательными 49 импульсами тока и при подключении к источнику 50 тока, управляемому напряжением,
Выходы.функциональных элементов блока управления соединены соответственно с упр авляющими шинами ключей (фиг,1 и 2): 33-с 7.-И 17; 36 - с 3; 37 - с 4; 38 - с 12; 39 - с 11,
Устройство работает в циклическом режиме, -Длительность цикла равна двум периодам выходного сигнала мультивибратора 32 блока управления. При этом в течение одного периода в одну из обмоток катушки колебательного устройства подаются последовательно импульс тока положительной и импульс тока отрицательной полярности, а в течение следующего периода эта обмотка подключается к источнику тока, управляемому напряжением, другая обмотка - к -автогенератору, и производят считывание показаний вольтметра и частотомера.
Работа устройства после установки в него контролируемой пружины.
Первым (фиг.1) по команде с блока 21 управления замыкается ключ 3, ключ 7 находится в замкнутом положении, а ключ 17 разомкнут в соответствии с состоянием выходов блока 21 управления. При замыкании ключа 3 в обмотку 6 катушки колебательного устройства подается ток положительной полярности от источника 1 тока. После размыкания ключа 3 на выходе обмотки 6 появ 1453357
ляется затухаюпщй сигнал (диаграмма W 49 на фиг.2), сооткетствующий свободным колебаниям катушки. В тот же момент (диаграммы 44 и 46 на фиг.2) по команде с блока 21 управления на определенное время замыкается ключ 12, разряжающий запоминающую емкость пик- детектора 10 отрицательных импульсов, на которой после этого запоминается усиленная усилителем 8 первая амплитуда выходного затухающего сигнала обмотки 6. Затем по команде с блока 21 управления ,замыкается ключ 4 и в
контролируемой пружины в это точке по формулам
FO
W.
к, I К-К„и; (2ТГ) -W
о
Ш
где К- коэффициент преобразова
m- масса катушки;
жесткость постоянно зак
ленной линейной пружины
Далее, с началом следующего п
,,;,.„,.далее, t. Het dJiuM следующего п
обмотку 6 катуш и опять подается ток g риода сигнала мультивибратора 32
такой Ж RQrTMUMUUIu/- ,,,,--i
|такой же величины,, но отрицательной полярности от источника 2 тока. После размыкания ключа 4 на выходе обмотки 6 вновь появляется затухающий сигнал (диаграмма 50 на фиг.2), соответствующий ее свободным колебаниям. В тот же момент (диаграммы 45 и 47 на фиг.2) по команде с блока 21 управления на определенное время замыкается ключ 11, разряжающий запоминающую ёмкость пик-детектора 9 положительных импульсов, на которой после этого запоминается усиленная усилителем 8 первая амплитуда выходного за тухающего сигнала обмотки 6. На выходе аналогового сумматора 13 формируется напряжение U, которое измеряется вольтметром 14 и поступает на вход источника 15 тока, управляемого напряжением.
Таким образом выходной Tok источника 15 равен
блока управления цикл работы уст ства повторяется.
Функ1у1и блока управления заклю чаются в переключении в необходим 20 моменты времени ключей 3, 4, 7, 12 и 17. Он работает (фиг.2) след щим образом.
Период сигнала мультивибратора не менее чем в два раза превышает 25 время затухания выходного сигнала обмотки 6 катушки колебательной с темы, соответствующего свободным затухаюпщм колебаниям катушки. Ча тота сигнала мультивибратора 32 д 30 лится на два триггером 33, работа щим в счетном режиме, т.е. период выходного сигнала триггера 33 уже менее чем в четыре раза больше вр мени затухания выходного сигнала обмотки 6 катушки. Выход триггера 33 связан с управляюпщми шинами к чей 7 и 17 Хфиг.О, Причем, когда на его выходе - логическая 17 разомкнут,, а ключ 7 находится 40 верхнем (фиг.1) положении; при ло гическом О ключ 17 замкнут, ключ 7 - в нижнем положении.
35
I KnU.
где К„ - коэффициент передачи источника 15 тока управляемого напряжением.
Начиная со следующего периода выходного сигнала мультивибратора 32
Период сигнала мультивибратора -32 не менее чем в два раза превышает 25 время затухания выходного сигнала обмотки 6 катушки колебательной системы, соответствующего свободным затухаюпщм колебаниям катушки. Частота сигнала мультивибратора 32 де- 30 лится на два триггером 33, работающим в счетном режиме, т.е. период выходного сигнала триггера 33 уже не менее чем в четыре раза больше времени затухания выходного сигнала обмотки 6 катушки. Выход триггера 33 связан с управляюпщми шинами ключей 7 и 17 Хфиг.О, Причем, когда на его выходе - логическая 17 разомкнут,, а ключ 7 находится в 40 верхнем (фиг.1) положении; при логическом О ключ 17 замкнут, ключ 7 - в нижнем положении.
Одновибратор 34 формирует импульсы (уровень логической 1), дли1 , ключ
блока управления, ключ 7 переключает- 45 тельность которых равна времени зату- ся в нижнее (фиг.1) положение, ахакия выходного сигнала обмотки 6
катушки.
ключ 17 замыкается. При этом в обмотку 6 катушки колебательной системы подается постоянный ток I (диаграмма 51 на фиг.2), компенсирую1Щй зону нечувствительности системы, а обмотка 19 подключается к автогенератору 16. Частота автоколебаний последнего измеряется частотомером 20
По показаниям (U) вольтметра 14 и показаниям (f) частотометра 20 находят усилие FO приведения контролируемой пружины в точку нулевого прогиба и дифферен1щальную жесткость
по переднему фронту импульсов мультивибратора 32, а одновибра- тор 35 - по заднему. Эти импульсы gQ поступают на управляющие шины ключей З.и 4 (фиго1) только при наличии на выходе триггера 33 логической 1, что достигается использованием логических элементов 2И-НЕ 36 и 37 соот- gg ветственно. По этим импульсам (уровень логического О) замыкаются ключи 3 и 4 и в катуижу подается положительный или отрицательный ток соответственно.
W
контролируемой пружины в этой точке по формулам
к, I К-К„и; (2ТГ) -W
о
где К- коэффициент преобразования;
m- масса катушки;
жесткость постоянно закрепленной линейной пружины.
Далее, с началом следующего педалее, t. Het dJiuM следующего п
риода сигнала мультивибратора 32
g риода сигнала мультивибратора 32
блока управления цикл работы устройства повторяется.
Функ1у1и блока управления заключаются в переключении в необходимые 20 моменты времени ключей 3, 4, 7, 11, 12 и 17. Он работает (фиг.2) следующим образом.
Период сигнала мультивибратора -32 не менее чем в два раза превышает 25 время затухания выходного сигнала обмотки 6 катушки колебательной системы, соответствующего свободным затухаюпщм колебаниям катушки. Частота сигнала мультивибратора 32 де- 30 лится на два триггером 33, работающим в счетном режиме, т.е. период выходного сигнала триггера 33 уже не менее чем в четыре раза больше времени затухания выходного сигнала обмотки 6 катушки. Выход триггера 33 связан с управляюпщми шинами ключей 7 и 17 Хфиг.О, Причем, когда на его выходе - логическая 17 разомкнут,, а ключ 7 находится в 0 верхнем (фиг.1) положении; при логическом О ключ 17 замкнут, ключ 7 - в нижнем положении.
Одновибратор 34 формирует импульсы (уровень логической 1), дли35
1, ключ
5 тельность которых равна времени зату- хакия выходного сигнала обмотки 6
катушки.
по переднему фронту импульсов мультивибратора 32, а одновибра- тор 35 - по заднему. Эти импульсы gQ поступают на управляющие шины ключей З.и 4 (фиго1) только при наличии на выходе триггера 33 логической 1, что достигается использованием логических элементов 2И-НЕ 36 и 37 соот- gg ветственно. По этим импульсам (уровень логического О) замыкаются ключи 3 и 4 и в катуижу подается положительный или отрицательный ток соответственно.
5
Одяонибратор 38 формирует короткие импульсы (уровень логического О) по переднему фронту выходных импульсов логического элемента 36, а одновибратор 39 - по переднему фронту выходных импульсов логического элемента 2И-НЕ 37. По последним импульсам замыкаются ключи 12 и 11 соответственно, которые разряжают запоминающие емкости пик- детекторов.
Формула изобретени
Автоматический измеритель жесткости пружин сейсмоприемников, содержащий подвижную катушку возбуждения с посадочными гнездами на торцах, в одном из которых закреплена линейная пружина с известной жесткостью, постоянный магнит, зафиксирванный в опорах внутри катушки, узел фиксации контролируемой пружин с приводом, автогенератор, выход которого соединен с частотомером, отличающийся тем, что, с целью повышения точности измерения, он снабжен источником тока положительной ; полярности и идентичным ему источником тока отрицательной полярности, усилителем, пик-детектором положительных импульсов и пик- детектором отрицательных импульсов.
533576
аналоговым сумматором, вольтметром, управляемым источником тока, блоком управления, пятью замыкающими ключами и одним переключаю1цим ключом, а катушка возбуждения имеет две отдель ные обмотки, причем одна из них подключена через первый замыкающий ключ к автогенератору, а другая динена с общим контактом переключающего ключа и через второй и третий замыкаю1 1ие ключи - с источником тока положительной полярности и источником тока отрицательной полярности
g соответственно, один из контактов
переключающего ключа соединен с выходом управляемого источника тока, а другой - с входом усилителя, выход которого соединен с входами пик-де2Q текторов, параллельно запоминающей емкости пик-детектора положительных импульсов включенчетвертьй замыкающий ключ, а параллельйо запоминающей емкости пик-детектора отрицательных
25 импульсов включен пятый замыкающий ключ, выходы пик-детекторов соединены каждый с одним из входов аналогового сумматора, выход которого соединен с вольтметром и входом управляемого
30 источника тока, выходы блока управления соединены с управляющими пшна- ми замыкаюищх и переключающего ключей.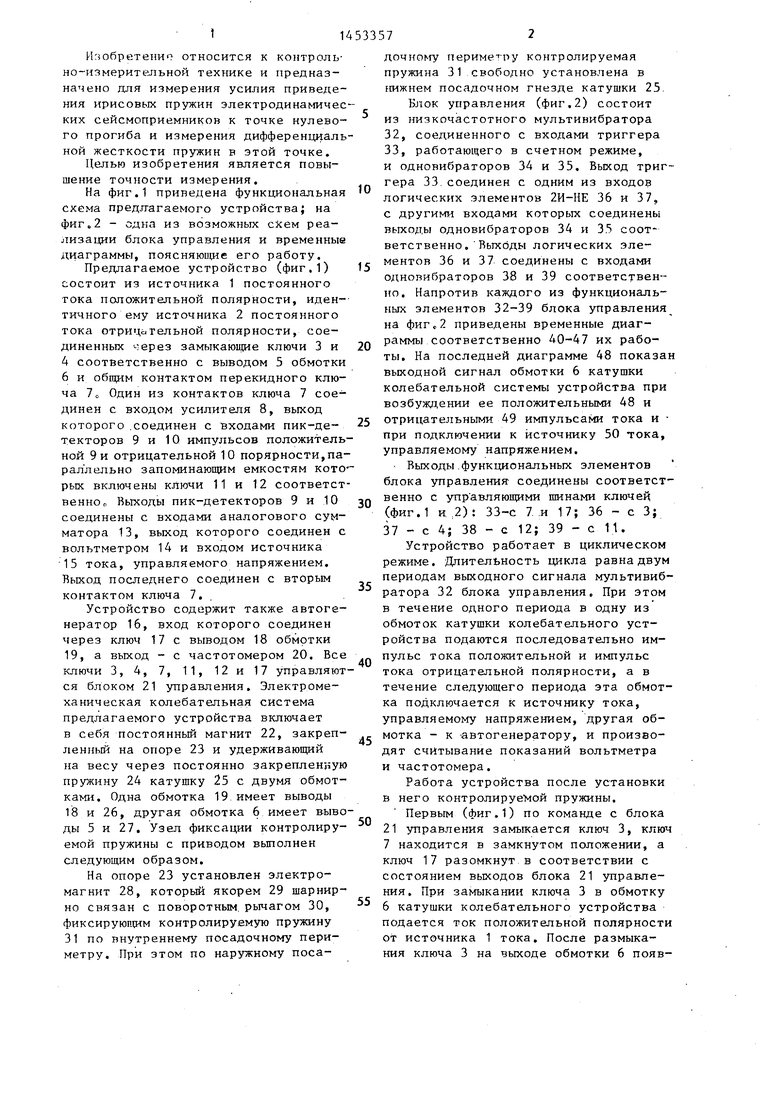

Изобретение относится к контрольно-измерительной технике и предназначено для измерения усилия приведения ирисовых пружин электродинамических сейсмоприемников к точке нулевого прогиба и измерения диффе- рвн1щальной жесткости пружин в этой точке. Цель - повышение точности измерения. За счет использования в устройстве идентичных источников тока положительной и отрицательной полярности осуществляется возбуяэдение преобразователя разнополярными импульсами. Запоминая при этом с помощью пик-детекторов первые амплитуды откликов и суммируя их на аналоговом сумматоре, обеспечивают компенсацию зоны нечувствительности преобразователя с помощью источника тока, управляемого напряжением с сумматора. 2 ил. ч (Л
28
3f
| Патент США № 3232102, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля жесткости упругих элементов сейсмоприемников | 1984 |
|
SU1267329A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
