Изобретение относится к контроль но-измерительной технике и предназначено для контроля упругих характеристик пружин электродинамических сейсмоприемников. Целью изобретения является расширение функциональных возможностей устройства за счет контроля жесткости упругих элементов сейсмолриемников в рабочем состоянии и повышение производительности. На чертеже представлено устройство. Предложенное устройство содержит катушку 1 возбуждения с гнездами для свободной укладки пружин 2 и 3, постоянный магнит А, который фиксируется опорами 5, проходящими через катушку 1 и закрепленными на верхней площадке стойки 6 угловой опоры 7. Пружины 2 и 3 фиксируются поворот ными рычагами 8 и 9 и удерживаются в этом положении прижимными пружинами 10. Рычаги 8 и 9 через тяги 11 и 12 связаны с сердечником соленоида 13 пальцами 14 и 15. На катушке закреплен инерционный элемент 16. Усилитель, генератор и частотомер условно не показаны. Предложенное устройство для конт роля жесткости упругих элементов сейсмоприемников работает следующим образом. В случае, когда необходимо измерить совместную жесткость обеих пру жин сейсмоприемника, включается сол ноид 13, сердечник которого через тяги 11 и 12 отводит рычаги 8 и 9. Катушка 1 возбуждения в это время верхней гранью прорезей сидит на оп pax 5. На наконечники рычагов 8 и 9 насаживают соответственно нижнюю верхнюю пружины 2 и 3 сейсмоприемни ка. Соленоид 13 отключается и под действием прижимных пружин. I1 рыча ги 8 и 9 с пружинами 2 и 3 возвращаются в исходное положение, фиксируя неподвижные концы пружин 2 и 3 на торцах постоянного магнита 4, а свободные концы пружин укладываются в посадочные гнезда катушки 1, причем нижняя пружина 3 поднимает кату ку 1 и устанавливает ее с зазором к опорам 5. Если контролируются пружины вер тикального сейсмоприемника, то устройство готово к измерению жесткост 92 Если же контролируются пружины рехкомпонентного или горизонтальноо сейсмоприемника, то устройство оворачивается и устанавливается на оответствующую опорную плоскость угловой опоры 7, после чего устройтво готово к измерению жесткости. Измерение жесткости при отключенном соленоиде 13 позволяет избежать омех от его электромагнитного поля. При измерении катушка I возбуждения включается в схему автогенераторов в качестве частотно-зависимого колебательного контура. Частота i автогенератора в этом случае связана с измеряемой жесткостью формулой -5iгде С - суммарная жесткость пружин; М - масса колебательной системы, состоящая из массы катущки возбуждения, массы инерционного элемента и массы пружин, участвующей в колебаниях. Решая уравнение относительно суммарной жесткости пружин, получают С f. Масса колебательной системы выбирается равной той же массе в сейсмоприемнике и для данной группы сейсмоприемников является постоянной. Полагая, что 4ii М К, получают формулу окончательно: С К f. Подставляя в формулу значения частоты i по показаниям частотомера, определяют суммарную жесткость пружин.I Если известна жесткость одной из пружин сейсмоприемника и она может быть использована как контрольная (эталонная, порядок работы при определении неизвестной жесткости второй пружины сейсмоприемника несколько иной. Пусть имеется верхняя пружина сейЬмоприемника известной жесткости. После ее установки в нижнее гнездо катушки 1 возбуждения устройства и фиксации рычагом 9 снимаются пальцы 14 и 15 нижней тяги 12, тяга отсоединяется от соленоида 13 и рычага 9. Теперь при включении соленоида I3 отводится только рычаг 8, на который насаживается пружина 2 неизвестной жесткости. При отключении соленоида пружина 2 фиксируется рычагом и укладывается в верхнее гнездо ка тушки 1 возбуждения. Устройство готово к измерению. Суммарная жесткост, пружин представляет собой алгебраическую сумму жесткостей пружин С С, С, где С, - жесткость верхней пружины с ейсмоприемник а; Cj - жесткость нижней пружины сейсмоприемника. Репин относительно неизвестной жесткости Cj С - С4, и подставив в формулу известную жесткость верхней пружины сейсмопри емника С и вычисленную суммарную жесткость пружин, получают значения жесткости пружины. При наличии нижней пружины сейс моприемника известной жесткости она устанавливается сйерху катушки 1 возбуяадения устройства,.тяга 11 сни мается, а контролируемая пружина ус танавливается снизу катушки возбужд ния на рычаге 8. В этом случае жесткость пружины подсчитьшается по формуле С, С - Cj. , Использование при сборке сейсмоприемников упругих элементов с жесткостью, измеренной в том же положении, в котором они работают в сейсмо приемниках, позволяет увеличить точность показаний сейсмоприемников по частоте собственных колебаний, а также применить методы селективной сборки изделия с целью уменьшения брака упругих элементов по жесткости 3294 Формула изобретения 1 . Устройство для контроля жесткости упругих элементов сейсмоприемников, содержащее катушку возбуждения, постоянный магнит, инерционный элемент, причем катушка возбуждения электрически соединена через усилитель с генератором и частотомером, отличающееся тем, что, с целью расширения функциональных возможностей устройства за счет контроля жесткости упругих элементов в рабочем состоянии и повышения производительности, устройство снабжено, угловой опорой и узлом фиксации упругих элементов с приводом, а катушка возбуждения вьшолнена с радиальными прорезями, через которые с зазором проходят фиксирующие постоянный магнит опоры, и снабжена посадочными гнездами на торцах. 2. Устройство по п.1, о т л и чающееся тем, что угловая опора имеет не менее двух опорных плоскостей, угол между каждой из которых и осью катушки возбуждения соответствует рабочему углу упругого элемента сейсмоприемника. 3. Устройство по п.1, о т л и чающееся тем, что узел фиксации упругих элементов выполнен из подпружиненных поворотных рычагов, соед 1ненных тягами с приводом. 4. Устройство по пп. I и 3, о т личающееся тем, что тяги узла фиксации упругих элементов выполнены с возможностью отсоединения от привода и подпружиненного поворотного рычага, фиксирующего соответствующий упругий элемент. 16 8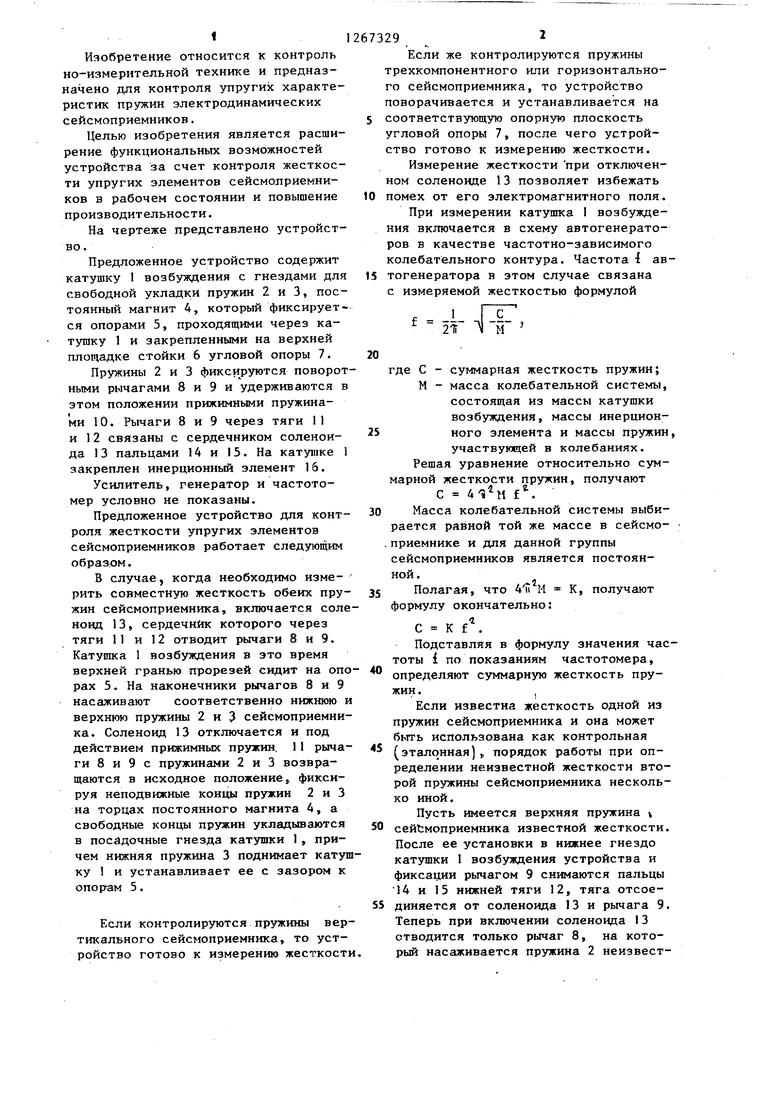
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и сортировки пружин по жесткости | 1988 |
|
SU1553208A1 |
| Автоматический измеритель жесткости пружин сейсмоприемников | 1987 |
|
SU1453357A1 |
| Способ измерения жесткости подшипника и устройство для его осуществления | 1991 |
|
SU1776347A3 |
| Устройство для определения положения центра масс объекта | 1990 |
|
SU1820255A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ НЕМАГНИТНЫХ ПОКРЫТИЙ НА ФЕРРОМАГНИТНЫХ ИЗДЕЛИЯХ | 1994 |
|
RU2087855C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ РЕМНЯ ПРИВОДА | 1992 |
|
RU2069327C1 |
| Способ возбуждения колебаний и устройство для его осуществления | 2015 |
|
RU2669163C2 |
| ГЕОГИДРОФОН | 2003 |
|
RU2231088C1 |

Изобретение относится к контрольно-измерительной технике и предназначено для контроля упругих характеристик пружин электродинамических сейсмоприемников. Целью изобретения является расширение функциональных возможностей устройства за счет контроля жесткости упругих элементов сейсмоприемников в рабочем состоянии и повышение производительности. Цель достигается размещением упругих элементов в устройстве контроля в том же положении, в котором они работают в сейсмоприемнике и в использовании в качестве инертной массы катушки, g идентичной применяемой в стеклоприем(Л нике, причем установка и съем упругих элементов в устройстве автоматизированы. 3 з.п. ф-лы. 1 ил.
| Патент США № 3232102, кл.73-161, 1966 | |||
| Чернигин А.Н.Вибрационно-частотный метод контроля характеристик упругих элементов | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
