Известны способы дистанционного контроля работы и положения пневмобура буро-сбоечных и нарезных машин, оснащенных гидродомкратами подачи, использующие эффект распространения упругих волн в массиве угля и породы.
Предлагаемый способ дистанционного контроля работы и положения пневмобура буро-сбоечных и нарезных машин отличается от известных тем, что контроль положения пневмобура в угольном пласте по простиранию осуществляется путем сравнения времени прохождения упругих волн от режущего органа в момент его включения до трех сейсмодатчиков, установленных в угольном пласте. Контроль положения пневмобура по гипсометрии угольного пласта осуществляется путем длительного сравнения амплитуды упругих волн, приходящих на штрек к трем сейсмодатчикам, один из которых установлен в угольном пласте, другой в почве и третий в кровле пласта. Такой способ дистанционного контроля работы и положения пневмобура позволяет осуществить направленное бурение восстающих скважин.
Особенность предлагаемого способа заключается также в том, что олин из сейсмодатчиков, установленный в угле на оси скважины, может быть использован для контроля по простиранию и по гипсометрии пласта.
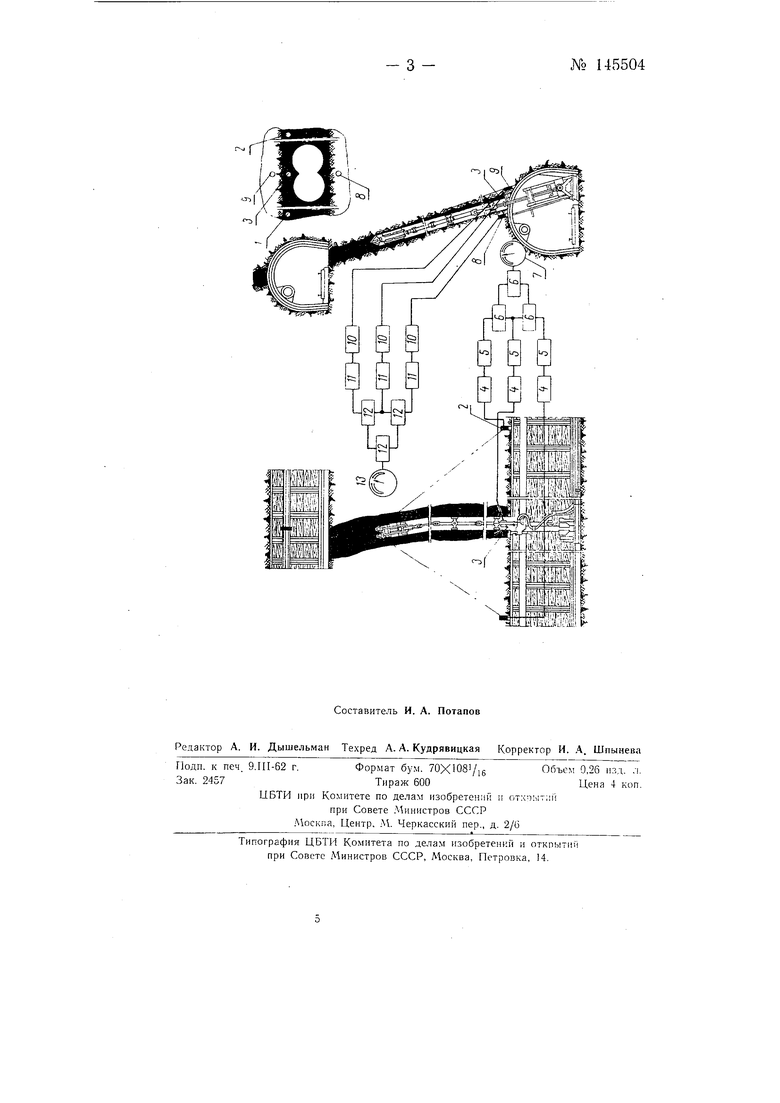
На чертеже изображена схема, поясняющая способ дистанционного контроля работы и положения пневмобура буро-сбоечных мащин.
Способ дистанционного контроля работы и положения пневмобура буро-сбоечных машин основан на использовании эффекта распространения упругих волн в массиве угля и породы, когда в качестве источника упругих волн служат зубки работающего режущего органа, которые в процессе резания угля или породы создают упругие волны. Схема спосо ба содержит две самостоятельные блок-схемы контроля: одна блок-схе№ 145504- 2 ма служит для определения отклонения режущей головки влево или вправо, по простиранию пласта, от заданного направления, а другая - для определения момента ухода режущего органа в почву или кровлю пласта, и любая из этих блок-схем контролирует работу режущего органа.
Для осуществления контроля положения пневмобура по простиранию на щтреке в уголь устанавливают три сейсмодатчика, из них сейсмодатчики / и 2 на некотором расстоянии от начала скважины, а сейсмодатчик 3 на оси начала скважины. При включении пневмодвигателя головки, упругие волны, распространяясь в угольном пласте с определенной скоростью, дойдя до сейсмодатчиков, наведут в пих электрические импульсы, которые попадут на входы усилителей 4, и, будучи усиленными, попадут на формирователи 5 импульсов и затем на схемы 6 сравнения по времени. Если пневмобур не отклоняется от заданного направления, то эта блок-схема не зарегистрирует разницу во времени при прохождении упругой волны от режущего органа к сейсмодатчикам и прибор 7 будет показывать нуль.
Для осуществления контроля ухода пневмобура в почву или кровлю пласта, в почве устанавливают сейсмодатчик 5, а в кровле сейсмодатчик 9, при этом сейсмодатчик 5. используется в обеих блок-схемах. В этой блок-схеме используется свойство границы между углем и породой ослаблять упругую деформацию при переходе из угля в породу и обратно.
Упругие волны, приходящие на штрек от работающего режущего органа, улавливаются сейсмодатчиками 5, 8 и Я преобразуются в электрический ток, усиливаются усилителями 10, ;1етектируются детекторами // и подаются в схемы сравнения по амплитуде 12. При движении режущего органа по углю прибор 13 показывает нуль. При нарушении режущим органом границы порода - уголь, например при уходе режущего органа в кровлю, произойдет резкое увеличение амплитуды сигнала, поступающего от сейсмодатчика 9 и прибор /5 даст соответствующее показапие.
Институт горного дела им. Скочинского отмечает полезность предложения, особенно для применения в шахтах опасных по газу и пыли, так как все элементы схемы располагаются на штреке.
Предмет изобретения
1.Способ дистанционного контроля работы и положения пневмобура буро-сбоечных и нарезных машин, оснащенных гидродомкратами подачи, использующий эффект распространения упругих волн в массиве угля и породы, отличающийся тем, что контроль положения пиевмобура в угольном пласте по простиранию осуществляется путем сравнения времени прохождения упругих волн от режущего органа в момент его включения до трех сейсмодатчиков, установленных в угольном пласте на штреке. Контроль положения пневмобура по гипсометрии угольного пласта осуществляется путем длительного сравнения амплитуды упругих волн, приходящих на штрек к трем сейсмодатчикам, один из. которых установлен в угольном пласте, другой в почве, а третий в кровле пласта.
2.Способ по п. 1, отличающийся тем, что один из сейсмодатчиков, установленный в угле на оси скважины, используется для контроля по простиранию и по гипсометрии пласта.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ непрерывного телеконтроля положения работающего режущего органа горных машин по гипсометрии угольного пласта | 1961 |
|
SU149895A1 |
| Способ автоматического регулирования подачи буросбоечной машины | 1959 |
|
SU129360A1 |
| Искробезопасный, высокочастотный датчик для дистанционного контроля | 1961 |
|
SU141839A1 |
| СПОСОБ РАЗРАБОТКИ МОЩНЫХ ПЛАСТОВ УГЛЯ | 1993 |
|
RU2069751C1 |
| СПОСОБ РАЗРАБОТКИ МОЩНОГО ПОЛОГОГО УГОЛЬНОГО ПЛАСТА | 1999 |
|
RU2168629C1 |
| СПОСОБ ОБРАБОТКИ УДАРООПАСНЫХ ПЛАСТОВ В СЛОЖНЫХ ГОРНОГЕОЛОГИЧЕСКИХ УСЛОВИЯХ | 1995 |
|
RU2083831C1 |
| Способ определения выбросоопасности в очистных выработках при отработке угольных пластов с труднообрушаемыми кровлями | 2019 |
|
RU2700854C1 |
| СПОСОБ РАЗРАБОТКИ КРУТЫХ УГОЛЬНЫХ ПЛАСТОВ | 2013 |
|
RU2540722C1 |
| Способ разработки мощных крутых пластов и устройство для его осуществления | 1985 |
|
SU1281671A1 |
| СПОСОБ РАЗРАБОТКИ КРУТЫХ И НАКЛОННЫХ УГОЛЬНЫХ ПЛАСТОВ | 1992 |
|
RU2042815C1 |