Широкое применение буросбоечиых с невращаюшимся ставом, оснащенных гидродомкратами подачи и головками с ротационными пневмодвигателями, :расиолсженными в скважине, вызывает необходимость автоматического регулирования скорости подачи става в соответствии со скоростью бурения скважины. Известны сиособы автоматического регулирования работы машин с применением аппаратуры, преобразующей механические колебания в электрические с одновременНЫЛ1 их усилением.
Предлагаемый способ автОМатического регулирования Лодачи буросбоечной мащины на забой осно-ван на регистраци частоты упругих колебаний корпуса ротационного пневмодвигателя, которые ломош.и акустического датчика и -преобразователя превраициотся в сигнал, управляющий подачей става буросбоечной машины. Усиленны) и преобразованный в постоянный ток сигнал, приводит в действие соленоид двойного действия, управляющий золотником гидросистемы подачи, которая изменяет усилие на забой, создаваемое гидродомкратами.
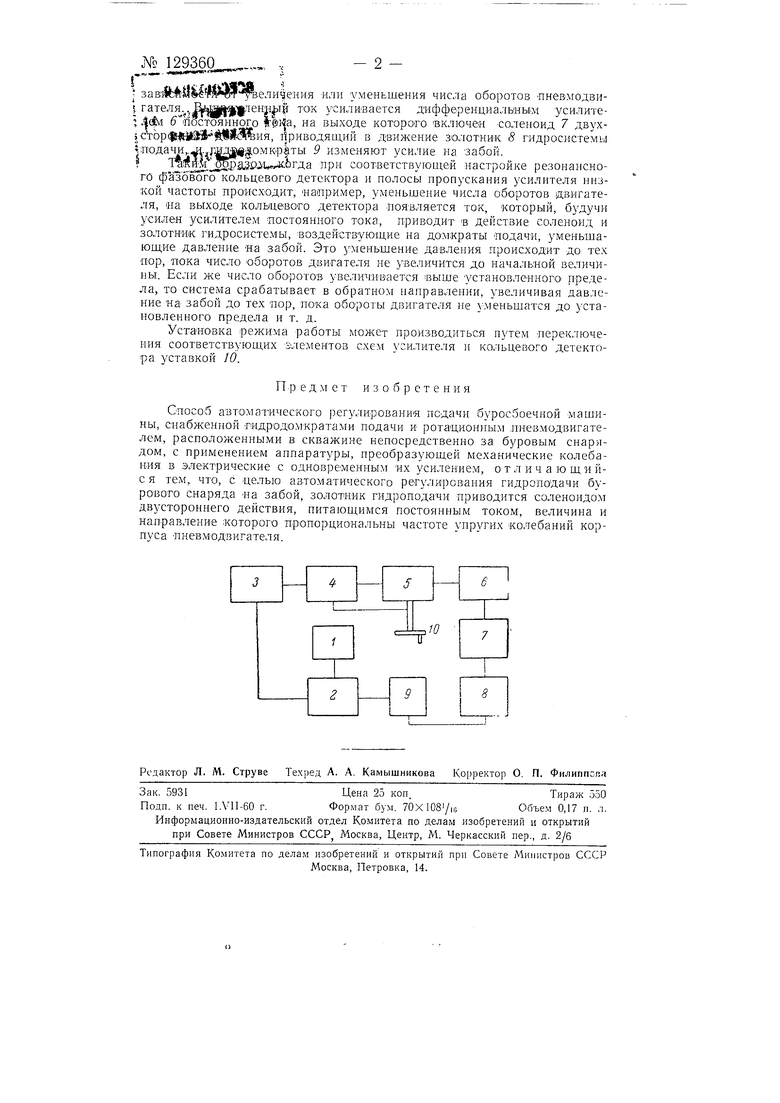
На чертеже показана блок-схема устройства, предназначенного для осуществления способа автоматического регулирозанИя подачи.
Упругие -колебания ко-рпуса пневмодвигателя / с частотой, равно) числу оборотов двигателя, зависящему от его нагрззки, передаются буровому ставу 2 контактным способом и улавливаются ларингофоном 3, преобразующим их в электрические колебан 1я. Электрические колебания с ларингофона поступают на вход узкололосного усилителя 4 низкой частоты, где они, будучи уеилены и отфильтрованы, ограничиваются с двух сторон. Ограниченный сигнал поступает па вход резонансного фазового кольцевого детектора 5, преобразующего входной сигнал в постоянный ток, величина которого зависит от частоты приходящего сигнала. В зависимости от настройки схемы (уставки) ток на выходе будет положительной или отрицательной полярности в