прямым линиям, совпадающим с диаметрами центральных колес 21 и 22 соответственно . Поскольку передаточное число первой пары передач со- ответствует числу направляюш 1х 3, 4, 5 в корпусе 1, то, например, для трехпозидионного ме энизма управляющий палец 25 через каждые 120 поворота кривошипа 2 будет размещаться на оси соответствующей направляющей 3, 4 или 5.
Управляющие стержни 41, 42 и 43 под действием пружин и амортизаторов (не показаны) занимают положение, при -котором эксцентриситет жестко связанных с ним эксцентриков 36 и
37располагается тангенциально к окружности вращения кривошипа 2.
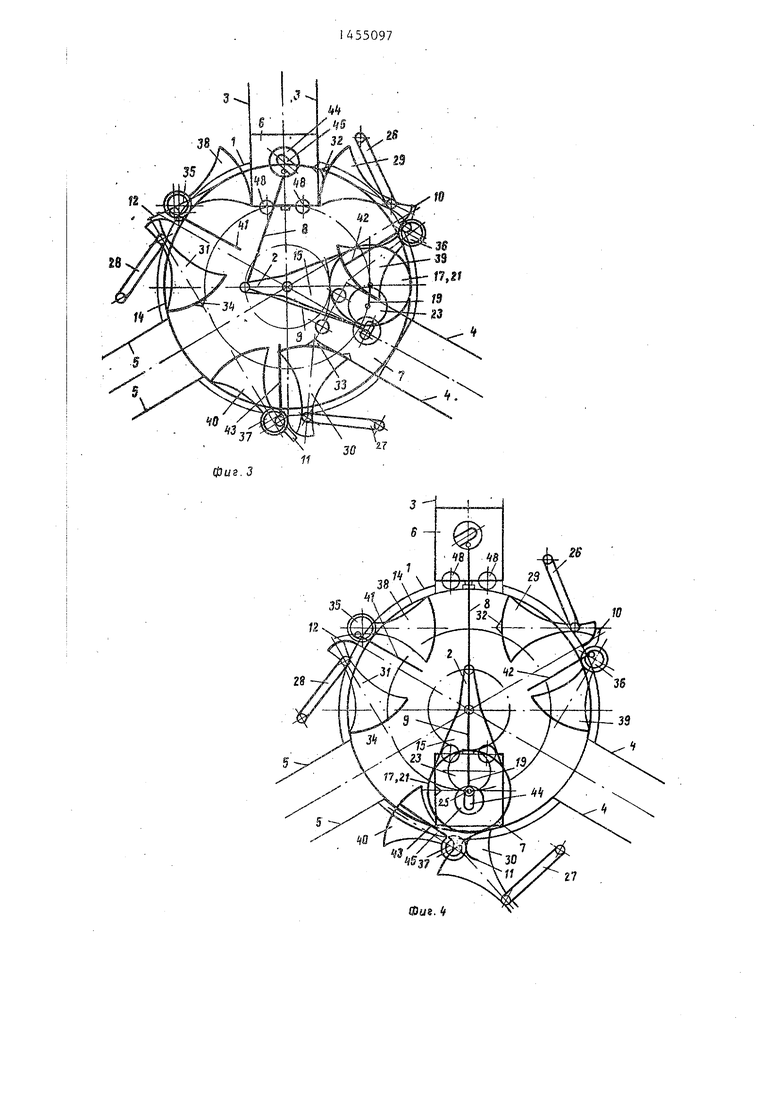
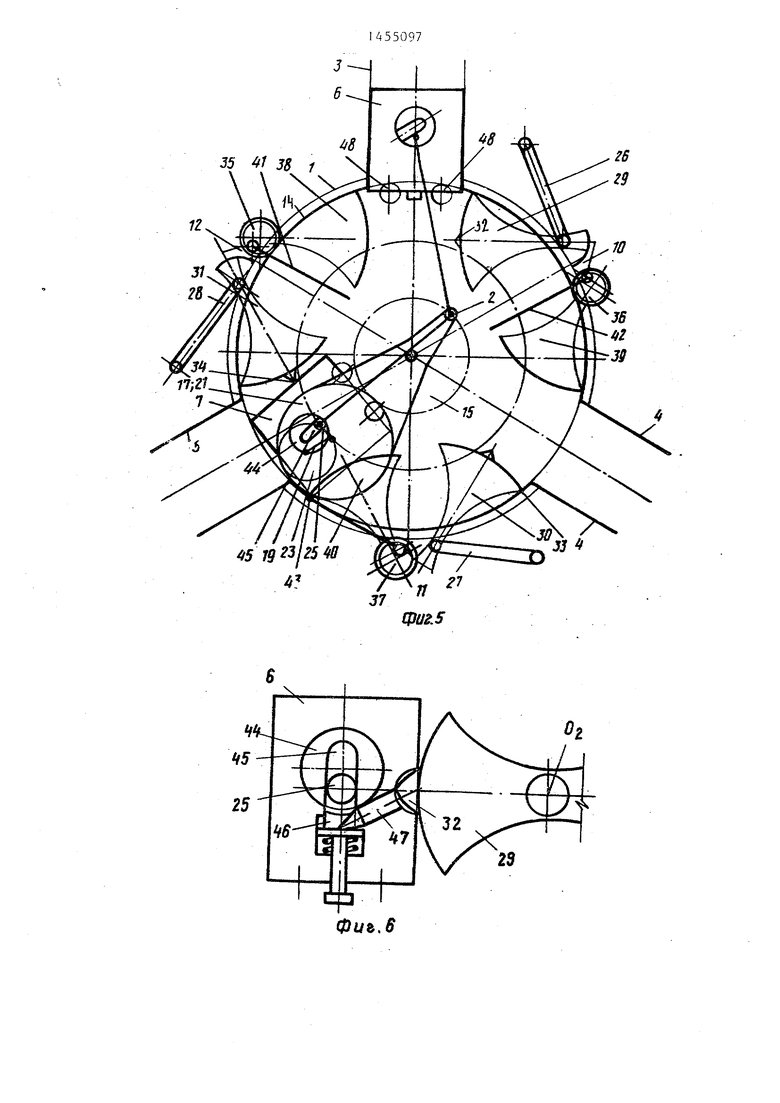
В положении, показанном на фиг.2, ползун 6 находится в нижней мертвой точке, и удерживается управляющим рычагом 29 и направляющим рычагом 38 на оси направляющей 3. Выступ 32 рычага 29 (фиг.6) вошел в специальную выборку в ползуне 6 и нажал на выключатель 47 фиксатора 46, который вьш1ел из паза 45 поворотной шайбы 44. Выступ 32 рычага 29, кроме того, также удерживает ползун 6 от поворота вокруг шатунного пальца.
В следующий момент ползун 6 начнет движение по направляющей 3 к верхней мертвой точке. Рычаги 29 и
38при этом поворачиваются вокруг
45 поворотных шайб 44 на ползуне 7 и начали их поворот.
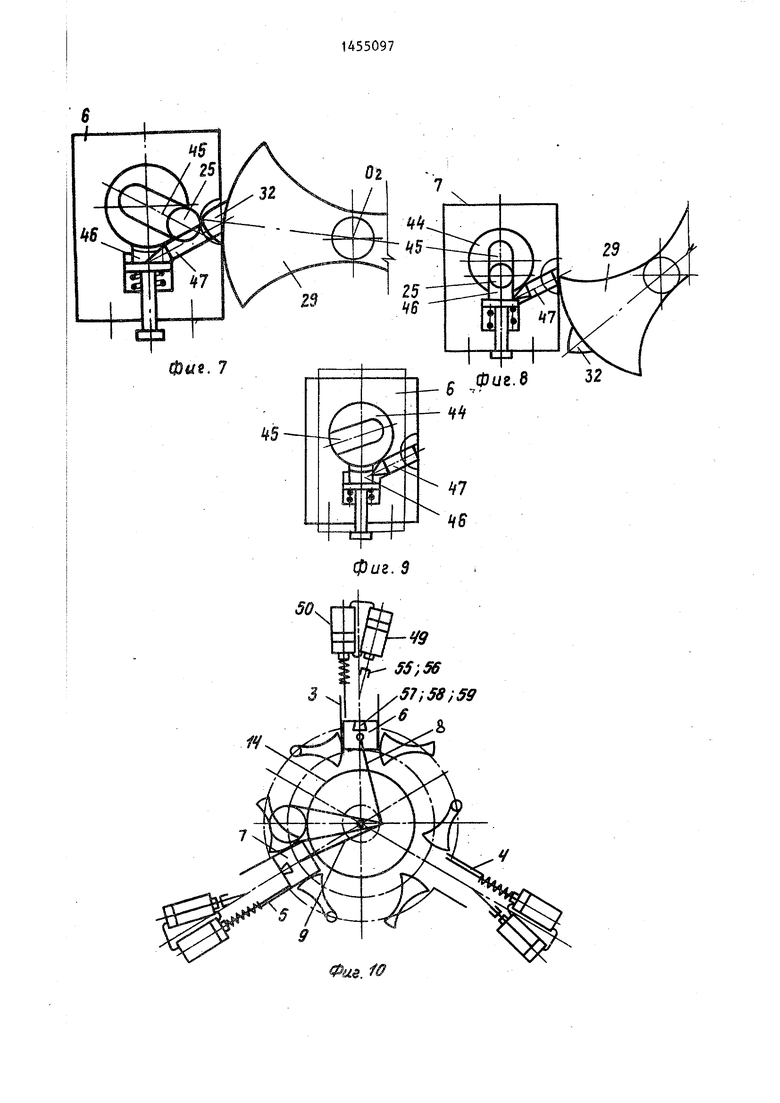
Через 30 поворота кривошипа 2 ползун 7 придет в свою нижнюю мерт вую точку. Управляющие пальцы 25 войдут в пазы 45 поворотных шайб 44 на ползуне 7, фиксатор 46 также под действием своей пружины войдет в паз 45, и поворотные шайбы 44 ползуна 7
35 будут зафиксированы (фиг.8). Рычаги 30 и 39 максимально развернутся к оси вращения кривошипа 2 и второе плечо рычага 30 выйдет из дуговой направляющей 11. Рычаги 29 и 38,
40 потеряв контакт с ползуном 6, под действием своих пружин вернутся в исходное положение. Ползун 7, увлекаемый управляющими пальцами 25 во вращение вокруг оси кривошипа 2, от45 жимает рычаг 30, который вместе с коромыслом 27 будет поворачиваться вокруг оси коромысла. Рычаг 39 вернется в исходное положение.
На фиг.4 ползун 6 находится в .
50 верхней мертвой точке. Фиксатор 46, взаимодействуя с выступом на корпусе 1 (не показан), освободил поворотные шайбы 44 ползуна 1, которые развернулись своими пазами 45 навстречу
55 управляющим пальцам 25. Ползун 7 максимально развернул рычаг 30 с коромыслом 27 и одновременно начал поворачивать рычаг 40 и управляющий стержень 43. Последний поворачивает
1эксцентрик 37 на его оси, в результате чего рычаг 40 одновременно с поворотом вокруг эксцентрика 37 удаляется от направляющей 5
На фиг.5 ползун 6 двигается к нижней мертвой точке. Рычаги 30 и 40 вернулись в исходное положение, а :ползун 7 удерживает стержень 43 в I отжатом положении.При дальнейшем повороте кривошипа 2 ползун 7 освободит стержень 43, который развернет эксцентрик 37 в исходное положение. С поворотом эксцентрика 37 рычаг 40 прижимается к ползуну 7 и соответственно прижмет его к рычагу 3II. Выступ 34 рычага 31 нажмет на выключа- тель 47 фиксатора 46, который выйдет из паза 45 поворотной шайбы 44 на ползуне 7 и тем самым даст возможность выхода из паза 45 управляющего пальца 25. Ролики 48 ползуна 7, опираясь на специальные выступы на водилак 15 и 16, предохраняют ползун 7 от поворота вокруг шатунного пальца. При дальнейшем повороте кривошипа 2 ползун 7, увлекая за собой хилчаги 31 и 40 и направляемый ими, войдет в направляющую 5 и начнет перемещение по ней к верхней мертвой точке. Ползун 6 придет в нижнюю мертвую точку в направляющей 3, и механизм займет положение, симметричное положению по фиг.2.
При дальнейшем вращении кривошипа 2 через два его оборота ползун 6 переместится к направляющей 4, а . ползун 7 - к направляющей 3. Тарим образом, положение механизма будет соответствовать положению НА фиг.2, но при этом ползуны 6 и 7 поменяютс местами. Полный цикл работы механизма, когда ползуны 6 и 7 снова окажутся на своих местах, соответствует четырем оборотам кривошипа 2.
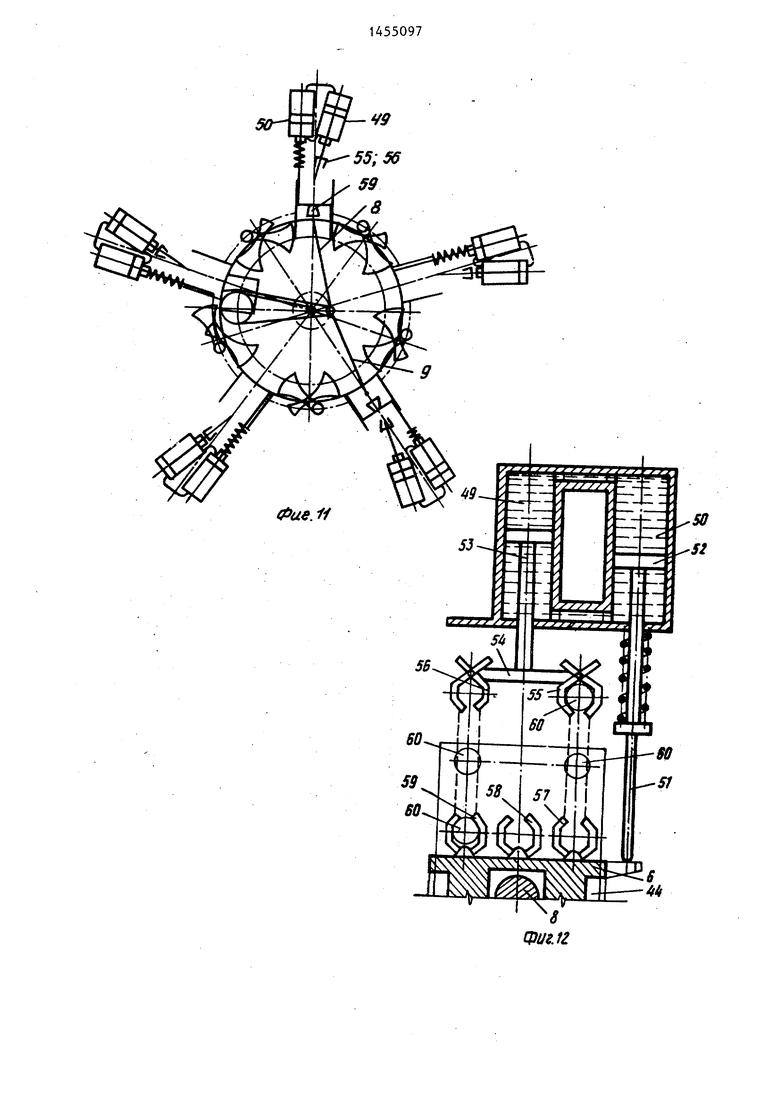
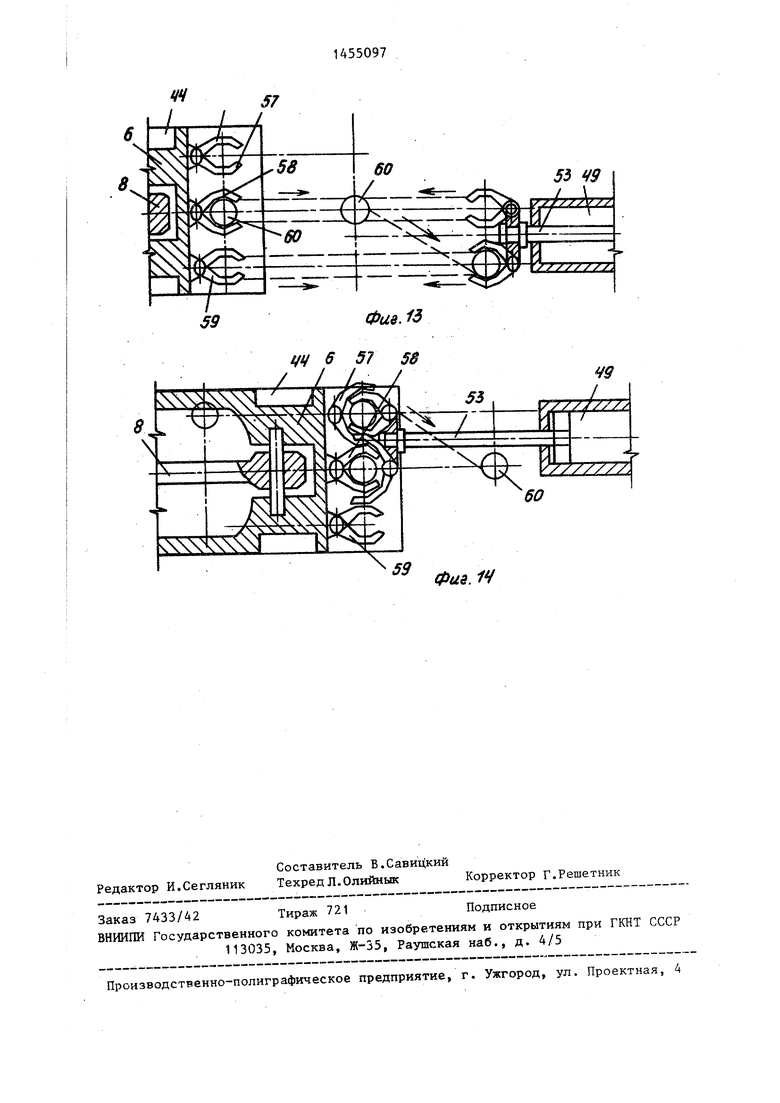
Использование механизма, например, в манипуляторе промышленного робота показано на фиг.12-14.
В зоне действия каждого ползуна 6 или 7 установлены сообщающиеся между собой гидроцилиндры 49 и 50. При перемещении ползуна 6 последний воздействует на шток 51, который,
перемещая поршень 52, создает давление в гидроцилиндре 50. Это давление передается в гидроцилиндр 49, шток 53 которого вместе с траверсой
54и установленными на ней захватам
55и 56 перемещается навстречу полз
5
5
ну 6 с установленными на нем захватами 57, 58 и 59.
При этом, захват 55, например, берет заготовку 60 из накопителя и подает ее в зону обработки, а захват
56подает обработанную заготовку - в другой накопитель. При сближении ползуна 6 и траверсы 54 захваты 55
и 56 входят соответственно в захваты
57.и 59 и принимают от них заготовки 60-. Если на пути движения траверсы 34 поставить винтовую направляющую, то траверса будет поворачиваться, а- захваты 55 и 56 менят ъся местами.
I
Работа робота с пятипозиционным
механизмом (фиг.11) протекает аналогично описанной. 0
Форм ула изобретения
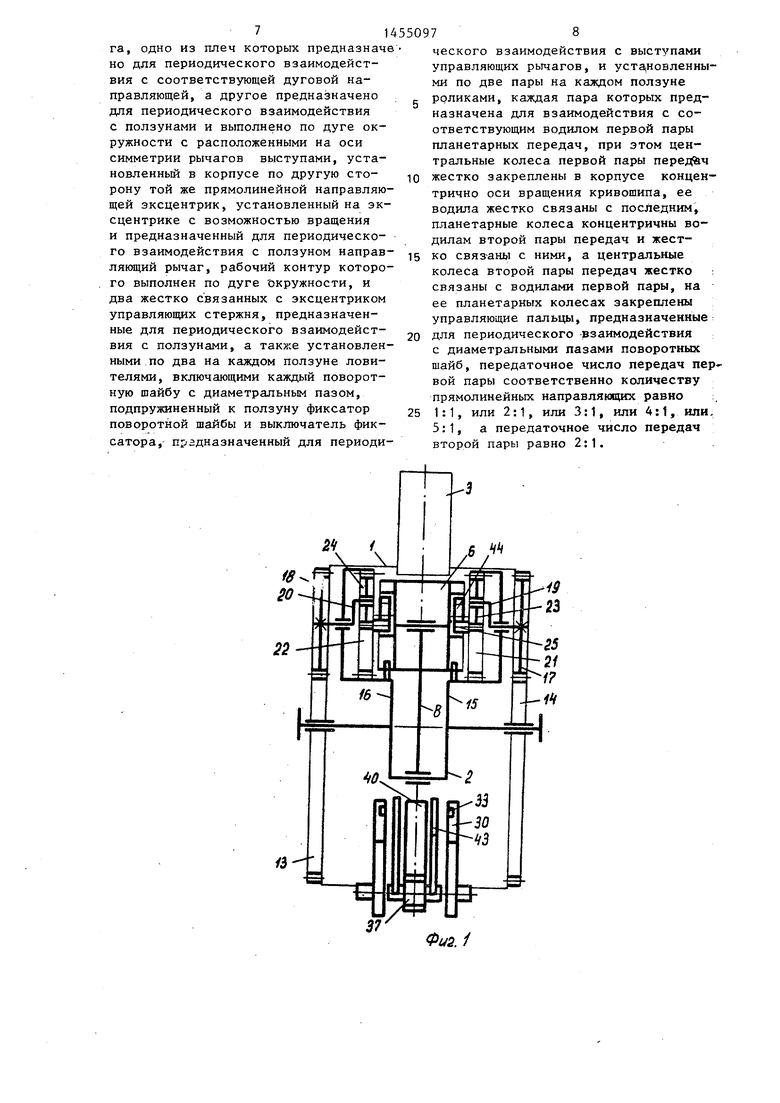
Кривошипно-ползунный механизм, содержащий корпус, установленный в нем кривошип, выполненные в корпусе равномерно по окружности вращения кривошипа прямолинейные направляющие, перпендикулярные оси вращения кривошипа, установленные в направляющих ползуны, и шатуны, шарнирно связанные одними концами с кривошипом, а другими концами - с соответствующими ползунами, отличающийся тем, что, с целью расши- 35 рения кинематических возможностей, количество направляющих равно одной, или двум, или трем, или четырем,или пяти, количество ползунов равно при одной и двух направляющих одному, 40 при .трех и четырех направляющих одному или двум при пяти направляющих одному,или двум, или трем, в корпусе по числу прямолинейных направляющих выполнены дуговые направляющие, ко- 45 личество шатунов равно количеству ползунов, а механизм снабжен двумя парами попарно идентичных планетарных зубчатых передач, расположенных в корпусе попарно симметрично по кон- 50 дам оси кривошипа, установленными в корпусе устройствами направления ползунов, количество которых равно количеству прямолинейных направляющих,каждое из которых включает в се- 55 бя два соосных коромысла, установ- - ленных в корпусе по одну сторону соответствующей прямолинейной направляющей, два шарнирно связанных с ними двуплечих управляющих рыча30
/3
Фий. i
П
26
30
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод электротехнического аппарата | 1975 |
|
SU652622A1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| Гвоздильный автомат | 1975 |
|
SU512843A1 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА К ТКАЦКОМУ СТАНКУ | 1995 |
|
RU2090675C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1994 |
|
RU2078966C1 |
| Устройство для изменения степени сжатия поршневого двигателя внутреннего сгорания | 1991 |
|
SU1782291A3 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ РЕЗАНИЕМ ПАЗОВ В ОТВЕРСТИИ ДЕТАЛИ | 1992 |
|
RU2088385C1 |
| Шарнирно-рычажный механизм с регулируемой длиной звеньев | 2017 |
|
RU2655568C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ШУМАТОВА (ВАРИАНТЫ) | 2014 |
|
RU2577966C1 |
Изобретение относится к криво- шипно-ползунным преобразователям вращательного движение в возвратно-поступательное и найдет применение, в частности, в многопозиционных машинах-автоматах. Цель изобретения - расширение кинематических розможностей механизма за счет создания возможности перемещения ползунов из одних направляющих в другие. При равномерном вращении кривошипа 2 ползуны 6, 7 совершают возвратно- поступательное движение в направляющих 3, 4, 5. Каждые два оборота кривошипа 2 система управления, включающая двухступенчатую планетарную передачу и набор кинематически связанных друг с другом и с планетарной передачей рычагов, осуществляет поочередную перестановку ползунов 6, 7 в соседние по направлению вращения кривошипа 2 направляющие. 14 ил. с to
f,2v
гк
w
Шуе. F
J5
1Z
25
Фиь.6
ФиВ.5
Ог
50
/У
50 -52
i/i/ 6 57 58
Фа9. i
Фи9. 14
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| М.: Наука, 1979, т.2, стр.436, рис.1404. |
