(54) ПРИВОД ЭЛЕКТРИЧЕСКОГО АППАРАТА


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электрическим аппаратом | 1974 |
|
SU526962A1 |
| ПРИВОД ЭЛЕКТРИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 1973 |
|
SU389559A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2021 |
|
RU2776460C1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Пружинный привод электрического выключателя | 1975 |
|
SU657475A1 |
| Устройство для подачи заготовок стана холодной прокатки труб | 1982 |
|
SU1080891A1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ) | 2009 |
|
RU2404901C2 |
| Механизм транспортировки материала на швейной машине | 1983 |
|
SU1208112A1 |



1
Иаобретени е относится к прввоаам дл быстрого приведения в действие подвижных контактов выссжовольтных выключателей и низковольтных автоматов за сче постепенно накопленной энергии в упруги телах типа пружин от двигателя через передачи, муфту обгона и рычажный механизм с двумя мертвыми положениями.
В известных приводах поворотное звено рычажного механизма,- кривошип связан через кинематическую цепь с подвижными контеСктами аппарата, а рабочее звено, совершающее прямой и обратный ходы, - с одним концом упругого тела, упираемого другим ксжцом в неподвижный упор; коромысло кривошипнс г1 ромыслов6го механизма совершает возвратно-вращательное движение и воздействует при прямом ходе на один конец спиральной пружины, другой конец которой упирается в неподвижный ynopj при обратном ходе коромысла за счет накопленной в пружине энергии приводится в быстрое вращение кривошип, от
которого через кинематическую цепь происходит включение подвижных контактов высоковольтного выключателя flj. В таких приводах йакопление энергии производится при повороте кривошипа примерно на 180 и использовании все- го прямого 1или обратного) хода рабочего звена для деформации упругого тела. Эти приводы применяются для мощных высоковольтных аппаратов, им&ющих большие ходы, противодействующие усилия от отключающих и контактных пружин, а также подвижные контакты больших масс.
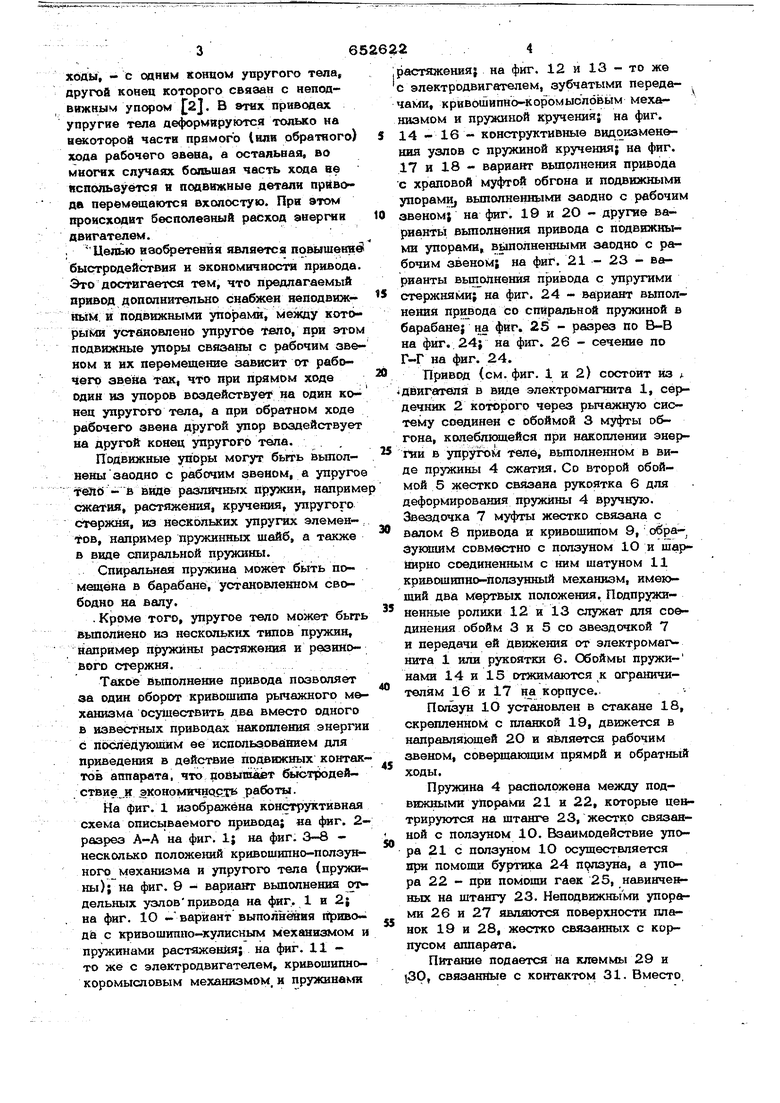
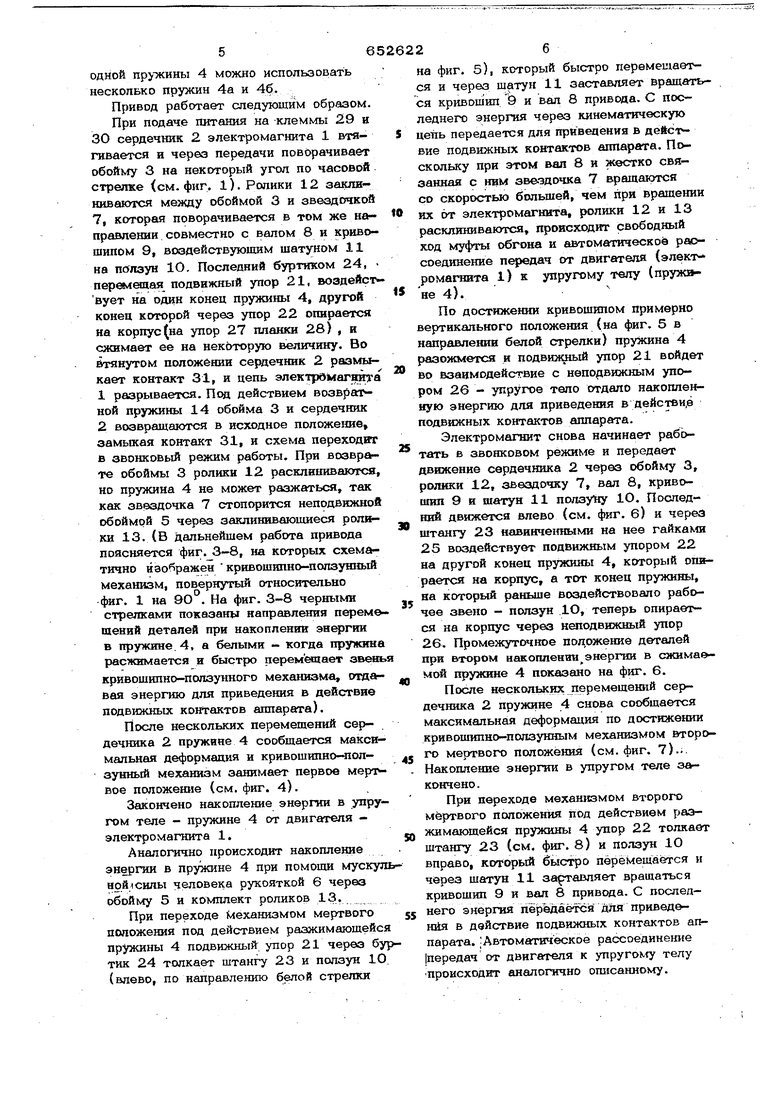
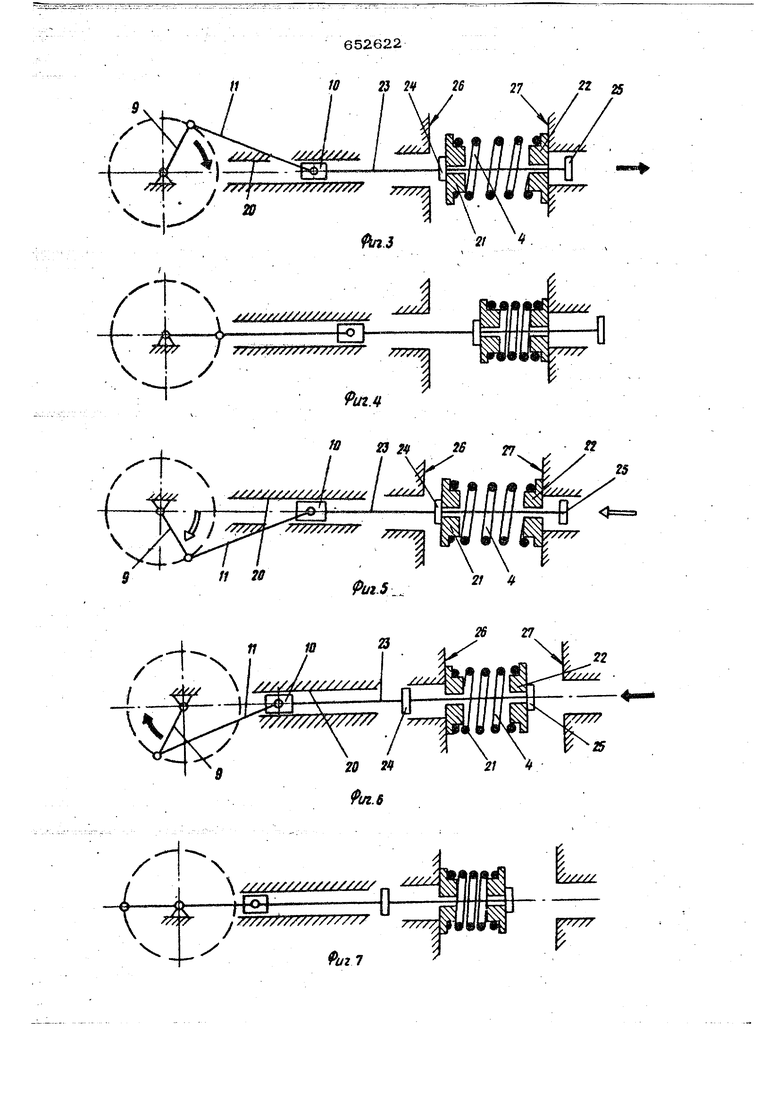
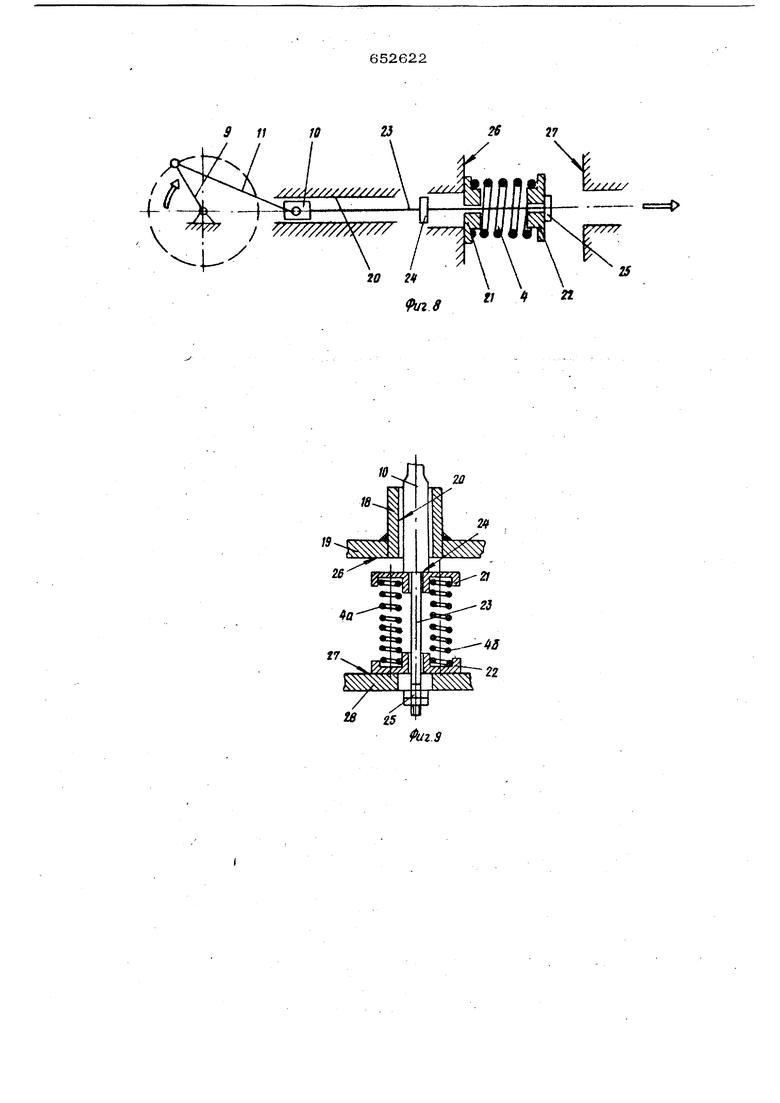
Известны также приводы электрических аппаратов с MaHJytMHi ходами и легкими контактами, для которых требуется накошиение меньшего количества энергии, содер1жащие двигатель, соединенный через перэдачи и муфту обгона с рычаж-; ным механизмом, кривошип которого связан через кинематическую цепь с подвижными конпгактами аппарата, а рабочее звено, сод1ержащее прямой и обратный ходы, - с одним концом упругого тела, другой конец которого связан с неподвижным упором , В этих приводах упругие тела деформируются только на некоторой части прямого (влв обратного) хода рабочего звена, а остальная, во многих случаях большая часть хода ее пспользуётся и подвижные детали привода перемещаются вхолостую. При этом происходит бесполезный расход энергии двигателем. , Целью иао етенвя является повышение быстродействия и экономичности привода Это достигается тем, что предлагаемый привод дополнительно снабжен неподвижным и подвижньтми упорами, между кот1 рыми усугбновлено упругое тело, при этом подвижные упоры связаны с рабочим звеном и их перемешение завнснт от рабочего эвена так, ЧТО при прямом ходе один на упоров воэдействуе на один конец упругого тела, а при обратном ходе рабочего звена другой упор воздействует на другой конец упругого тела. Подвижные упоры могут быть вьшолвены заодно с рабочим звеном, а упруго - в виде различных пружин, наприм сжатия, растяжения, кручения, упругого стержня, иэ нескольких упругих элементов, например пружинных шайб, а также в виде спиральной пружины. Спиральная пружина может быть помшцена в барабане, установленном свободно на валу. . Кроме того, упругое тело может быть Выполнено на нескольких типов пружин, inanpHMep пружины растяжения и резинового стержня. Такое Выполнение привода позволяет за один оборот кривошипа рычажного механизма осуществить два вместо одного в известных приводах накопления энергии с лоЬлёДуюишм ее использованием для приведения в действие подвижных контак тов аппарата, что повышлет быстродействие .и экономйчщс тв работа. На фиг. 1 изображена конструктивная схема описываемого привода; «а фиг. 2- разрез А-А на фиг, 1} на фиг. 3-8 несколько положе1шй кривошипно-ползунного механизма и упругого тела (пружины); на фиг. 9 - вариа г выполнения от дельных узловпривода на фиг. 1 и 2; . на фиг. 10 -вариант выполнения приводе с кривошипно-кулисным механизмом и пружинами растяжения; на фиг. 11 то же с электродвигателем, кривошнпнс коромысловым механизмом, и пружинами 6 24 растяжения; на фиг. 12 и 13 - то же с электродвигателем, зубчатыми передачами, кривошипно-коромыслбвым механизмом и пружиной кручения; на фиг. 14 - 16 - конструктивные видоизмен&ния узлов с пружиной кручения; на фиг. 17 и 18 - вариант вьшрлнения привода с храповой муфтой обгона и подвижными ynopaMHj выполненньтми заодно с рабочим звеном; на фиг. 19 и 2О - другие варианты выполнения привода с подвижными упорами, выполненными заодно с рабочим звеном; на фиГ. 21 - 23 - варианты вьптрлнения привода с упругими стержнями; на фиг. 24 - ва:риант выполнения прибода со спиральной пружиной в барабане} на фиг. 25 - разрез по В-В на фиг. 24; на фиг. 26 - сечение по Г-Г на фиг. 24. Привод (см. фиг. 1 и 2) состоит из двигателя в виде электромагнита 1, сердечник 2 которого через рычажную систему соединен с обоймой 3 муфты обгона, колеблкнцейся при накоплении энергии в ynpyirow теле, вьшолненном в виде пружины 4 сжатия. Со второй обоймой 5 жестко связана рукоятка 6 для деформирования пружины 4 вручную. Звездочка 7 муфпл жестко связана с валом 8 привода и кривошипом 9, обраЗукяним совместно с ползуном 1О и шарНирно соединенным с ним шатуном 11 кривш1Ш1ш -ползунный механизм, имеющий два мертвых положения. Подпружиненные ролики 12 и 13 служат для соединения обойм 3 и 5 со звездочкой 7 и передачи ей Движения от электромагнита 1 или рукоятки 6. Обоймы пружинами 14 и 15 отжимаются к ограничителям 16 и 17 на корпусе.. Погюун Ю установлен в стакане 18, скрепленном с планкой 19, движется в направляющей 2О и яЬляется рабочим звеном, совершающим прямрй и обратный ходы. Пружина 4 расположена между подвижными упорами 21 и 22, которые центрируются на штанге 23, жестко связанной с ползуном 10. Взаимодействие упора 21 с ползуном 1О осуществляется ори помощи буртика 24 ползуна, а упора 22 - при помоши гаек 25, навинченных на штангу 23. Неподвижными упорами 26 и 27 являются поверхности планок 19 и 28, жестко св5изаш1ых с корпусом аппарата. Питание подается на клеммы 29 и |3р, связанные с контактом 31. Вместо, одной пру-жины 4 можно использовать несколько пружин 4а и 46. Привод работает следующим образом. При подаче питания на клеммы 29 и 30 сердечник 2 электромагнита 1 втягивается и через передачи поворачивает обойму 3 на некоторый угол по часовой стрелке см. фиг. 1). Ролики 12 заклиниваются между обоймой 3 и звездочкой 7, которая поворачивается в том же на правлении совместно с валом 8 и кривошипом 9, воздействующим шатуном 11 на ползун 10, Последний буртиком 24, перемещая подвижный упор 21, воздейст вует на один конец пружины 4, другой конец которой через упор 22 опирается на корпус (на упор 27 планки 28) , и сжимает ее на некоторую величину. Во йтянутом положении сердечник 2 размыкает контакт 31, и цепь электрвмагища 1разрывается. Под действием возвратной пружины 14 обойма 3 и сердечник 2возвращаются в исходное положе1Ше замыкая контакт 31, и схема переходит в звонковый режим работы. При возврате обоймы 3 ролики 12 расклиниваются, но пружииа 4 не может разжаться, так как звездочка 7 стопорится неподвижной обоймой 5 через заклинивающиеся ролики 13. (В дальнейшем работа привода поясняется фиг. 3-8, на которых схематично йао ражен кривошипно-ползуниый механизм, повернутый относительно фиг. 1 на 90 . На фиг. 3-8 черными стрелками показаны направления перем щений деталей при накопленнн в пружине. 4, а белыми - когда пружина расткимается и быстро перемещает звень кривошипно-ползунного механизма, отдавая энергию для приведения в действие подвижных контактов аппарата). После нескольких перемещений сердечника 2 пружине 4 сообщается максимальная деформация и кривошипно-ползунный механизм занимает первое положение (см. фиг. 4). Закончено накопление энергии в .упругом теле - пружине 4 от двигателя электромагнита 1. Аналогично происходит накопление энергии в пружине 4 при помощи мускул ной силы человека рукояткой 6 через обойму 5 и комплект роликов 13. При переходе Механизмом мертвого положения под действием разжимающейся пружины 4 подвижньй упор 21 через буртик 24 толкает штангу 23 и ползун 10. (влево, по направлению белой стрелки 6 2б на фиг. 5), который быстро перемешается и через шатун И заставляет вращаться кривошип Э и вал 8 привода. С последнего энергия через кинематическую цеТ1ь передается для привецения в дейст вие подвижных контактов аппарата. Поскольку при этом вал 8 и жестко свяэашшя с ним звездочка 7 ашаютсн со скоростью большей, чем при вращении их от электромагнита, ролики 12 и 13 расклиниваются, происходит свободный ход муфты обгона и автоматическое ра(Осоединение передач от двигателя (электромагнита 1) к упругому телу (пружине 4). По достижении кривошипом примерно вертикального положения (на фиг. 5 в направлении белой стрелки) пружина 4 разожмется и подвююшй упор 21 войдет во взаимодействие с неподвижным упором 26 - упругое тело отдало накопленную энергию для приведения в действие подвижных контактов аппарата. Электромагнит снова начинает работать в звонковом режиме и передает движение сердечника 2 через обойму 3, ролики 12, звездочку 7, вал 8, кривоипш 9 и шатун 11 ползуТну 1О. Последний движется влево (см. фиг. 6) и через штангу 23 навинче1шыми на нее гайками 25 воздействует подвижным упором 22 на другой конец пружины 4, который опирается на корпус, а тот конец пружины, на который раньше воздействовало рабочее звено - ползун 1О, теперь опирается на корпус через неподвижный упор 26. Промежуточное положение деталей при втором накоплении энергии в сжима мой пружине 4 показано на фиг. 6. После нескольких перемещений сердечника 2 пружине 4 снова сообщается максимальная деформация по достижении кривошипно-ползунным механизмом второго мертвого положения (см. фиг. 7).;. Накопление энергии в упругом теле закончено . При переходе механизмом второго мёртвого положения под действием разжимающейся пружины 4 упор 22 толкает штангу 23 (см. фиг. 8) и ползун 10 вправо, который быстро перемешается и через шатун 11 забавляет вращаться кривошип 9 и вал 8 привода. С послед55 энергия передаётся для приведенйя в действие подвижных контактов аппарата, jАвтоматическое рассоединение передач от двигателя к ynpyroKty телу Происходит аналогично описанному.
По достижении кривошипом 9 примерно ввртикально1ч положения (на фиг. 8 в н ра&пении белой стрелки) пружина 4 разожмется: и подвижный упор 22 войдет во взаимодействие с неподвиж- ньш упором 27 - упругое тело отдало накошпенную энергию для приведения в действие подвижных контактов аппарата.
Работа привода не изменится, если вместо роликов 12 и 13 установить шарики, а вместо одной пружины 4 - несколько пружин 4а и 46 (см. фиг. 9). Кроме того, пружины 4,4а и 46 сжатая могут быть заменены другими, налрим каждая из них может бьргь составлена из ynpynjx шайб как в тарельчатых npyi.жинах, а также могут быть использованы комбинации из нескольких типов пружин, например сжатия и составленных из упругих шайб.
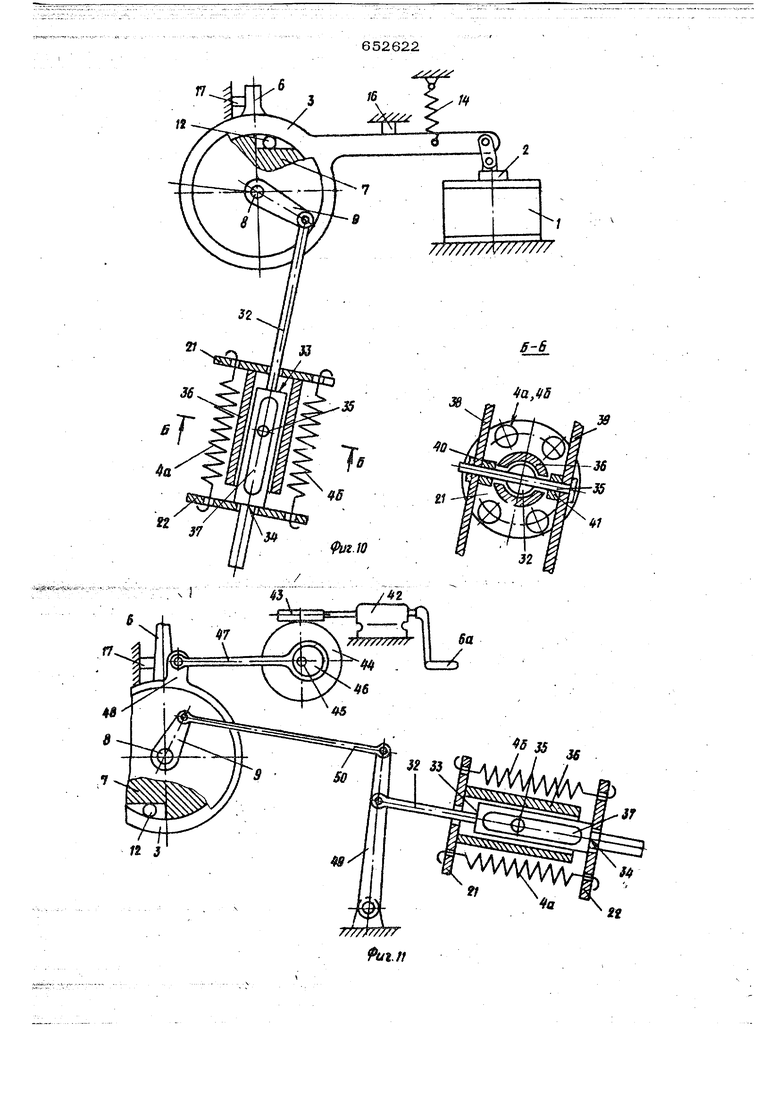
Вариант выполнения привода с кривошипно-кулисным механизмом и пружинами растяжения показан на фиг. 1О, Здесь с кривошипом 9 шарнирно соединена кулиса 32, снабженная буртиками 33 и 34 которая является рабочим звеном. Она совершает не только прямой и обратный ходы подобно ползуну Ю на фиг. 1, но и покачивается на оси 35 совместно с цилиндром 36, снабженным налравлязощей для ее возвратно-поступательного перемещения. Кулиса 32 имеет паз 37 для обеспечения возможности ее перемещения относительно оси 35. На кулисе свободно установлены подвижные упоры 21 и 22, вьшолненные в виде шайб и соединенные с концами упругих тел, а и1менно пружин 4а и 46 растяжения. Ось 35 проходит сквозь цилиндр 36 и кулису 32, как показано на разрезе Б-Б, и вставлена в отверстия стенок 38 и Й19 корпуса. Между шшиндром и стенками на оси 35 установлены дистанционны,е втулки 40 и 41. В этом, варианте функции неподвижных упоров выполняют торцы цилиндра 36.
При работе электромагнита 1 в звонковом режиме за одно втягивание сердечника 2 кривошип 9 поворачивается по часовой стрелке на некоторый угол и перемещает кулису 32. Последняя буртиком 34 толкает упор 22, воздействуя на соединенные с ним концы пружин 4а и 45, в то время как другие их концы опираются на корпус через упор 21, взаимо действующий с верхним торцом цилиндра 36, и ось 35. Одновременно кулиса 32, цилиндр 36, упоры 21 и 22 с пружинаМИ 4а и 46 поворачиваются на оси 35 против часовой стрелки.
После нескольких перемещений сердечника 2 пружинам 4а и 46 сообщается максимальная деформация и кривошипно-кулксный механизм занимает первое мертвое положение, при этом оси кривошипа 9 и кулисы 32 совпадают с вертикальной осью, проведенной через центр вала 8. Закончено одно накопление энергии в упругих телах.
При переходе этого положения под действием сжимающихся пружин 4а и 46 упор 22 через буртик 34 толкает кулису 32, которая быстро перемещается вверх и заставляет вращаться кривошип 9, звездочку 7 и вал 8 по часовой стрелке С вала 8 энергия через кинематическую цепь передается для приведения в действие подвижных контактов аппарата. При этом кулиса 32 и подвижные детали 36, 21, 22, 4а и 46 поворачиваются на оси
35против чайовой стрелки, а такжеi происходит автоматическое рассоединение передач от двигателя к упругим телам за счет свободного хода муфты обгона.
По достижении кри&Ошипом 9 примерно горизонтального положения, т. е. до совпадещ1Я его оси с горизонтально осью вала 8, пружины 4а и 46 сбнсмут ся и подвижный упор 22 войдет во взаимодействие с нижним торцом цилиндра
36- упругие тела отдали накопленную энергию для приведения вдействие, подвижных контактов аппарата.
Электромагнит 1 снова начинает работать и агюлогично поворачивает кривошип 9 в том же направлении, т. е. по часовой стрелке, который увлекает кулису 32. Последняя буртиком 33 воздействует теперь на другие концы пружин 4а и 46, соединенные с упором 21, в то время как их противоположные концы опираются на корпус через упор 22, нижний торец цилиндра 36 и ось 35. Пружины 4а и 46 растягиваются и по достижении кривошипнонкулисным механизмом второго мертвого положеюш, т. е. когда оси кривошипа 9 и кулисы 32 совпадут с вертикальной осью, проведенной через центр вала 8, получают снова максималь ную деформацию. Закончено второе накопление энергии в упругих телах.
Вр время второго накопления энергии кулиса 32 и подвижные детали 36, 21, .22, 4а и 46 совместно поворачиваются на оси 35 по часовой стрелке.
При переходе механизмом второго мертвого положения под действием сжимающихся пружин 4а и 46 упор 21 через буртик 33 толкает кулису 32, которая быстро перемещается вниз и заставляет быстро вращаться кривошип 9, зввэдочку 7 и вал 8 в том же направлении, т. е, по часовой стрелке. С вала 8 энергия передается для приведения в действие подвижных контактов аппарата. При этом кулиса 32 и подвижные детали 36, 21, 22, 4а и 46 совместно поворачиваются на оси 35 по часовой стрелке, а также происходит свободный ход муфты обгона.
По достижении кривощипом 9 примерно горизонтального положения, т. е. до совпадения его оси с горизонтальной осью вала 8, пружины 4а и 46 и упор 21 войдет во взаимодействие с верхним торцом шшиндра 36 - упругие тела Отдали второй раз энергию для приведения в действие подвижных контактов аппарата.
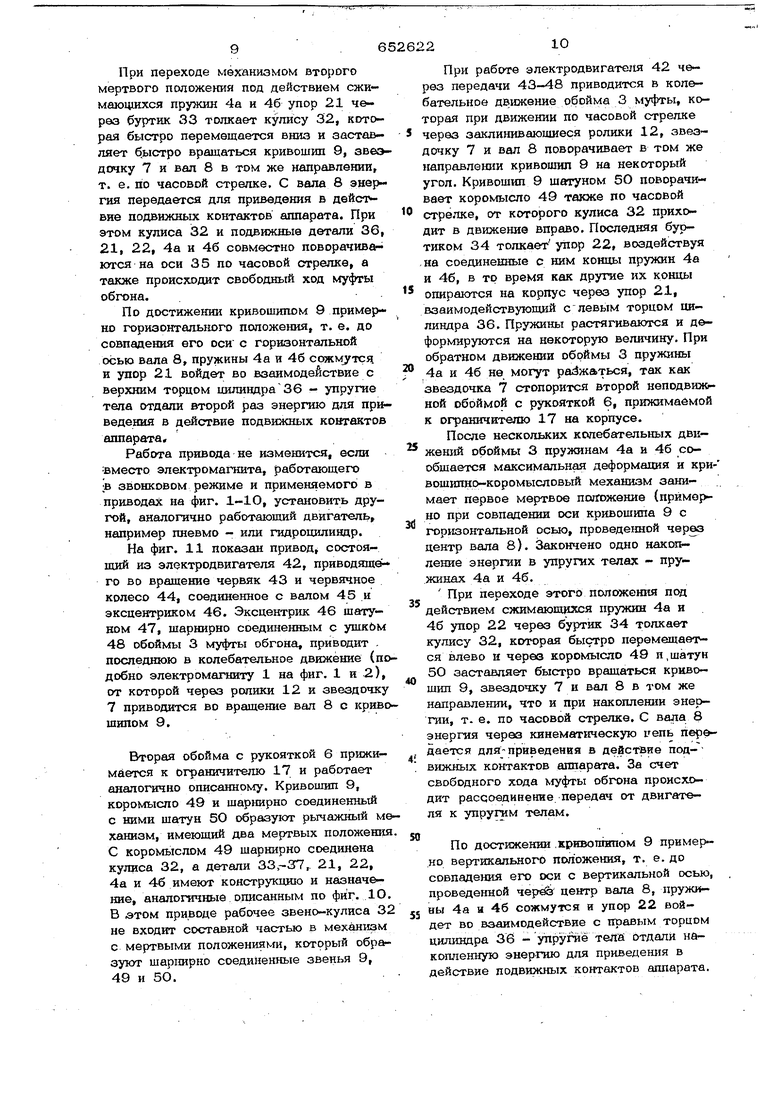
Работа привода не изменится, если вместо электромагнита, работающего ;в звонковом режиме и применяемого в приводах на фиг. 1-10, установить другой, аналогично работающий двигатель, например пневмо - или гидрощшиндр.
На фиг. 11 показан привод, состоящий из электродвигателя 42, приводящее го во вращение червяк 43 и червячное колесо 44, соединенное с валом 45 и эксцентриком 46. Эксцентрик 46 шатуном 47, щарнирно соединенным с ущкьм
48обоймы 3 муфты обгона, приводит . последнюю в колебательное движение (подобно электромагниту 1 на фиг, 1 и 2), от которой через ролики 12 и звездочку
7приводится во вращение вал 8 с кривощипом 9.
Е торая обойма с рукояткой 6 прижимается к ограничителю 17 и работает аначогично описанному. Кривошип 9, коромысло 49 и шар1шрно соединенный с ними щатун 5О образуют рычажный ме ханизм, имеющий два мертвых положешщ С коромыслом 49 шарннрно соединена кулиса 32, а детали 33,-37, 21, 22, 4а и 46 имеют конструкцию и назначение, аналогичные описанным по фиг. Ю.
8этом приводе рабочее звено-кулиса 32 не входит составной частью в механизм с мертвыми положениями, который обра зуют щариирно соединенные звенья 9,
49и 50.
При работе электродвигатет я 42 через передачи 43-48 приводится в колебательное движение обойма 3 муфты, которая при движении по часовой стрелке через заклинивающиеся ролики 12, звездочку 7 и вал 8 поворачивает в том же направлении кривощип 9 на некоторый угол. Кривощип 9 щатуном 5О поворачивает коромысло 49 также по часовой
0 стрелке, от которого кулиса 32 приходит в движение вправо. Последняя буртиком 34 толкает упор 22, воздействуя ,на соединенные с ним концы пружин 4а и 46, в то время как другие их концы
5 опираются на корпус через упор 21, взаимодействующий солевым торцом цилиндра 36. Пружины растягиваются и деформируются на некоторую величину. При обратном движении обрймы 3 пружины 4а и 46 не могут разжаться, так как звездочка 7 стопорится второй неподвижгной обоймой с рукояткой 6, прижимаемой к ограничителю 17 на корпусе.
После нескольких колебательных дви5жений обоймы 3 пружинам 4а и 46 сообщается максимальная деформация и кривощипно-коромысловый механизм занимает первое мертвое положение (npHMef но при совпадении оси кривощипа 9 с горизонтальной осью, проведе щой через центр вала 8). Закончено одно накопление энергии в упругих телах - пружинах 4а и 46.
При переходе этого положения под
5 действием сжимающихся пружин 4а и 46 упор 22 через буртик 34 толкает кулису 32, которая быстро перемещает ся влево и через коромысло 49 и,щатун 5О заставляет быстро вращаться кривощип 9, звездочку 7 и вал 8 в том же направлении, что и при накоплении энергии, т- е. по часовой стрелке. С вала 8 энергия через кинематическую гепь передается ДЛЯ; приведения в действие под- вюкных контактов аппарата. За счет свободного хода муфты обгона происходит рассоединение передач от двигателя к упругим телам.
По достижении .кривопгапом 9 примерно вертикального положения, т. е. до совпадения его оси с вертикальной осью, проведенной чер цеш-р вала 8, пруживы 4а и 46 сожмутся и упор 22 войдет во взаимодействие с правым торцом цилиндра 36 -ут11ругиетелй Отдали накопленную энер-гию для приведения в действие подвижных контактов аппарата.
Электродвигатель 42 снова начинает работать и аналогачно поворачивает кривошип 9 в том же направлении, который через шатун 5О поворачивает против часовой стрелки коромысло 49, увлекающее кулису 32 влево. Последняя буртиком 33 воздействует теперь на другие концы пружин 4а и 46, соединенные с упором 21, в то время как их противоположные концы опираются на корпус через упор 22, взаимодействукнций с правым торцом цилшздра 36.
Пружины 4а и 46 растягиваются и по достижении кривошшшо-коромысловым механизмом второго мёртвого положения (примерно при совпадении оси кривошипа 9 с горизонтальной осью, проведенной через центр вала 8) снова получают максимальную деформашоо. Закончено второе накопление энерпш в упругих телах.
При переходе механизмом второго мертвого положения под действием сжимающихся пружин 4а и 46 упор 21 через буртик 33 толкает кулису 32, которая быстро перемещается вправо. Через коромысло 49, поворачивающееся по часовой стрелке, и шатун 5О быстро врашаются кривсшип 9, звездочка 7 и вал 8 в том же направлении, что и при накоплении энергии, т. е. по часовой стрелке. С вала 8 энергия передается для приведения в действие подвижных KOirraKтов аппарата. За счет свободного хода муфть В это время происходит р1аёсЬедйнение передач от двигателя к упругим телам.
По достижении кривошипом 9 примерно вертикального положения, т. е. до совпадения его оси с вертикальной осью, пржины 4а и 45 сожмутся и подвижный упор 21 войдет во взаимодействие с левым торцом цилиндра 36 - упругие тела второй раз отдали энергий для приведения в действие подвижных контактов аппарата.
Накопление энергии в упругих телах вручную Можно производить не только при помощи покачиваемой рукоятки 6, связанной со второй обоймой и вторым комплектом роликов, но и при помощи вращаемой съемной рукоятки 6а, надеваемой на вал двигателя 42. В этом случае червячную передачу 43, 44 выполняют самотормозящейся для предотвращения сжатия растянутых пружин 4а и 46 при обратном движении обоймы 3 против часовой стрелки либо при уменьщении мускульной силы человека при работе его рукояткой 6.
Работа приводов, показанных на фиг. 1О и 11, не изменится, если вместо пружин 4а и 46 растяжения установить упругие стержни, работающие на растяжение, из металла или другого материала, например из резины. Кроме того, могут применяться упругие тела, выполненные из нескольких типов пружин, например пружин растяжения и резиновых стержней.
В приводах, показанных на фиг. 1-11 для накопления энергии в упругих телах и отдачи ее для приведения в действие подвижных контактов а1шарата используется рабочее звено возвратно-поступательного действия, совершающее прямой и обратный ходы. Однако возможно выполнение привода с рабочим звеном возвратно-вращательного действия, совершающим прямой и обратный ходы.
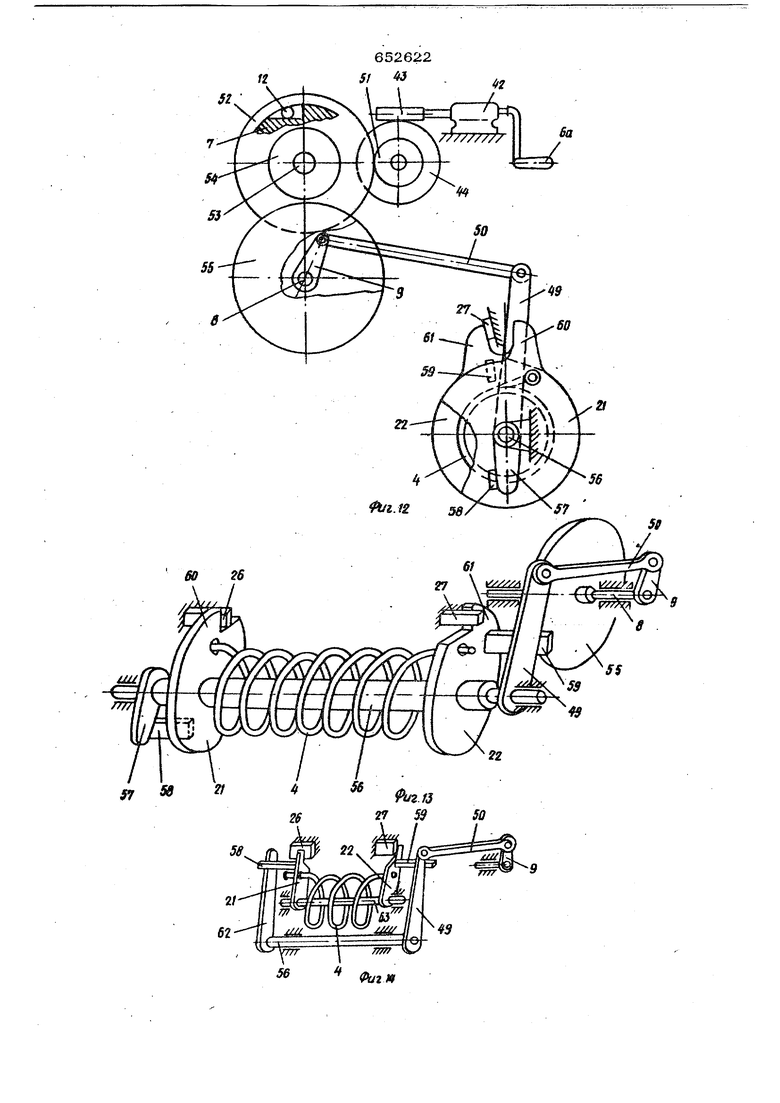
На фиг. 12 приведена конструктивная схема привода, а на фиг. 13. - его объемное изобретение, где от электродвигател 42 приводятся во вращение червяк 43, червячное колесо 44 и жестко связанная с ним зубчатая шестерня 51. Последняя вращает зубчатое колесо 52, вьшолненно заодно с обоймой роликовой (шариковой) муфты обгона, звездочка 7 которой жестко связана с промежуточным валом 53 и зубчатой шестерней 54. Колесо 52 с обоймой установлено относительно вала 53 свободно. Шестерня 54 зацепляется с зубчатым колесом 55, жестко связанным с валом 8 привода и кривошипом 9. Кривошип 9, коромысло 49 и шанирно соединенный с ними шатун 5О об-i разуют механизм, имеющий два мертвых положения. Коромысло 49 при совершеНИИ кривошипом 9 одного оборота соверщает прямой и обратный ходы и жестко соединено с валом 56 и рычагом 57, образуя совместно с ними рабочее звено возвратн -вращательного действия, что является отличительной особенностью данного варианта вьщолнения привода. Кроме того, в этом приводе упругое тело 4 в виде пружины кручения, концы которой вставлены в подвижные упоры 21 и 22, выполненные в виде дисков, взаимодействующих с рабочим звеном при помощи выступов 58 и 59. Диски установлены с возможнсхггью опира)шя на корпус, для чего они снабжены приливами ВО и 61, взаимодействующими
с неподвижными упорами 26 и 27, установленными на корпусе.
При работе электродвигателя 42 чере самотормозшцуюся червэтнук 43, 44 и зубчатую 51, 52 передачи привЪдится во вращение обойма муфты обгона, которая через заклинивающиеся ролики 12 соединяет ее со звездочкой 7. Далее через передачу 54, 55 движение по часовой Ьтрелке передается кривошипу 9, а от него шатуну 50 и коромыслу 49, KJ торое совместно с валом 56, и рычагом 57 поворачиваются в том же направлени (см. фиг. 12). Рычаг 57 соприкасается с выступом 58 и поворачивает подвижный упор 21, воздействуя на соединенныс ним конец пружины 4, в то время как другой ее конец опирается на корпус ч&рез прилив 61 подвижного упора 22, взаимодействующий с неподвижным 27. Пружина 4 закручивается до максимальной деформации по достижении кривошипно-коромысловым механизмом первой) мёртвого положения (примерно при совпадении оси кривошипа 9 с горизонтальной осью, проведенной через цент вала 8 на фиг. 12). Закончено одно накопление энергии в упругом теле - пружине 4,
При переходе этого мертвого попож&шся, под действием раскручивающейся пружины 4 подвижный упор 21 быстро поворачивается .против часовой стрелки (см. фиг. 12), увлекая выступом 58 рычаг 57, вал 56 и коромысло 49, от которого через шатун 50 кривошип 9 и вал 8 быстро вращаются по часовой стрелке, т. е. в направлении, совпадаю щем с направлением их вращения при накоплении энергии. С вала 8 энергия через кинематическую цепь передается для приведения в действие подвижных контактов аппарата.
. Во время быстрого вращения вала в за счет накопленной энергии пружины 4 колесо 55 вращает через шестерню 54 и вал 53 звездочку 7 со скоростью большей, чем получает обойма с.колесом 52 от электродвигателя 42..
В результате свободного хода муфты обгона ролики 12 расклиниваются и происходит автоматическое рассоединение передач от двигателя к упругому телу.
Установка муфты обгона на промежуточном валу 53 позволяет уменьшить на ней крут5Ш1Ий момент, т. е, применить муфту меньших габаритов.
По достижении кривошипом 9 примерно вертикального положения, т. е. до совпадения его оси с вертикальной осью, проведенной через центр вала 8, пружина 4 раскрутится и прилив 60 подвижного упора 21 войдет в соприкосновение с упором 26 корпуса - упругое тело отдало накопленную энергию для приведения в действие подвижных ковггактов аппара0та.
. , Электровигатель 42 снова начинает работать и аналогично поворачивает кривошип 9 в том же направлении, т. е. по. часовой стрелке (см. фиг. 12), который
5 через шатун 50 заставляет вращаться коромысло 49 и вал 56 против часовой стрелки. Коромысло 49 соприкасается с выступом 59 и поворачивает подвижный упор 22, воздействуя теперь на другой конец пружины 4, в то время как ее противоположный конец опирается на корпус через прилив 60 подвижного упора 21, взаимодействующий с неподвижньтм упором 26. Пружина 4 закручивается
5 снова до максимальной деформации по достижении кривошипно-коромысловым механизмом второго мертвого положе1шя (примерно при совпадении оси кривошипа 9 с горизощ-альной осью, проведен0ной через центр 8). Закончено второе накопление энергии в упругом теле.
При переходе механизмом мертвого . положегтя под действием раскручивающейся пружины 4 подвижный упор 22
3 быстро поворачивается по часовой стрелке ( см. фиг. 12), увлекая выступом 59 коромысло 49 с валом 56 и рычагом 57, а от коромысла через шатун 5О кривошип 9 и вал &, заставляя их быстро врашаться по часовой стрелке. С вала 8 энергия передается для приведения в действие подвижных контактов аппарата.
Во время быстрого вращения вала 8. за счет свободного хода муфты обгона
5 происходит рассоединение передач от двигателя к упругому телу.
По достижении кривошипом 9 примерно вертикального положения пружина 4 раскрутится i прилив 61 подвижного 22 войдет в соприкосновение с упором 27 корпуса - упругое тело второй раз отдало энергшо для приведения в действие подвижных контактов аппарата.
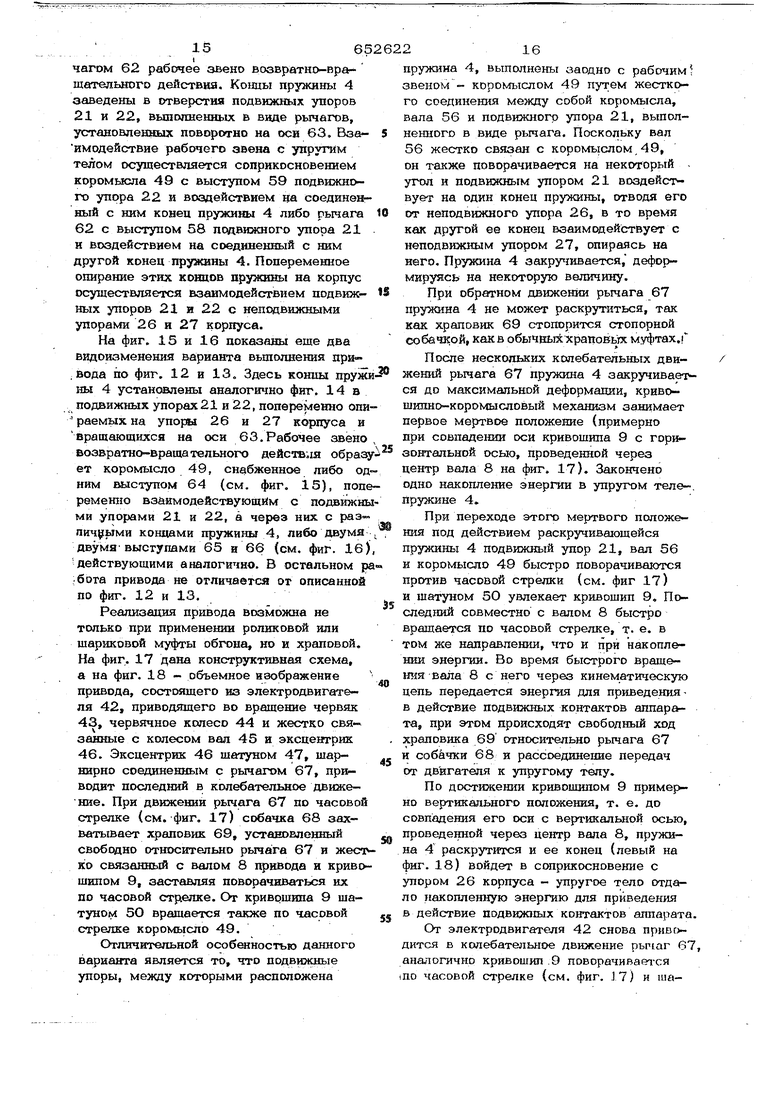
На фиг. 14 показано видоизменение
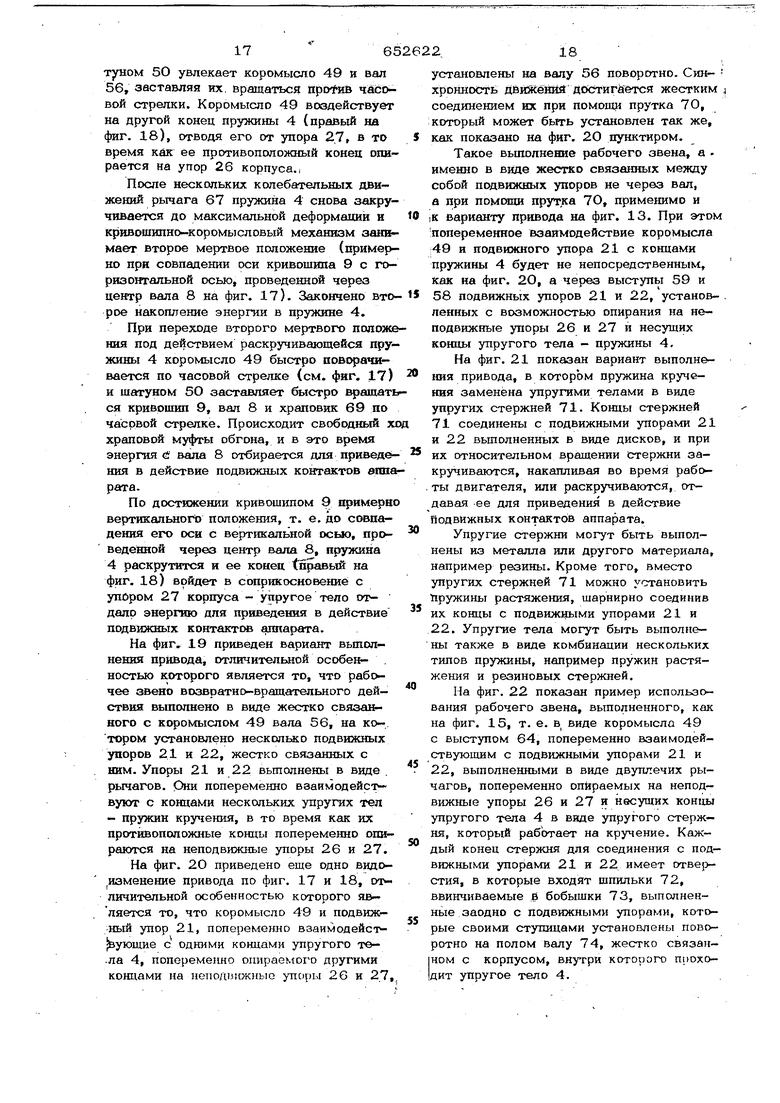
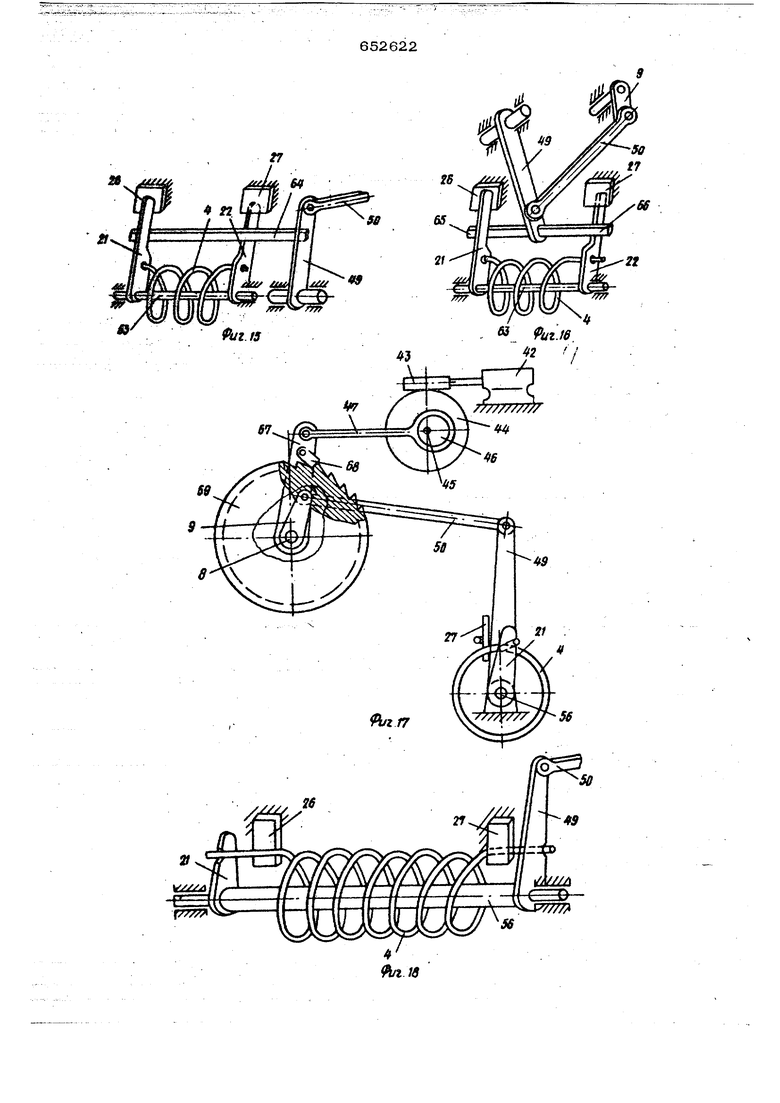
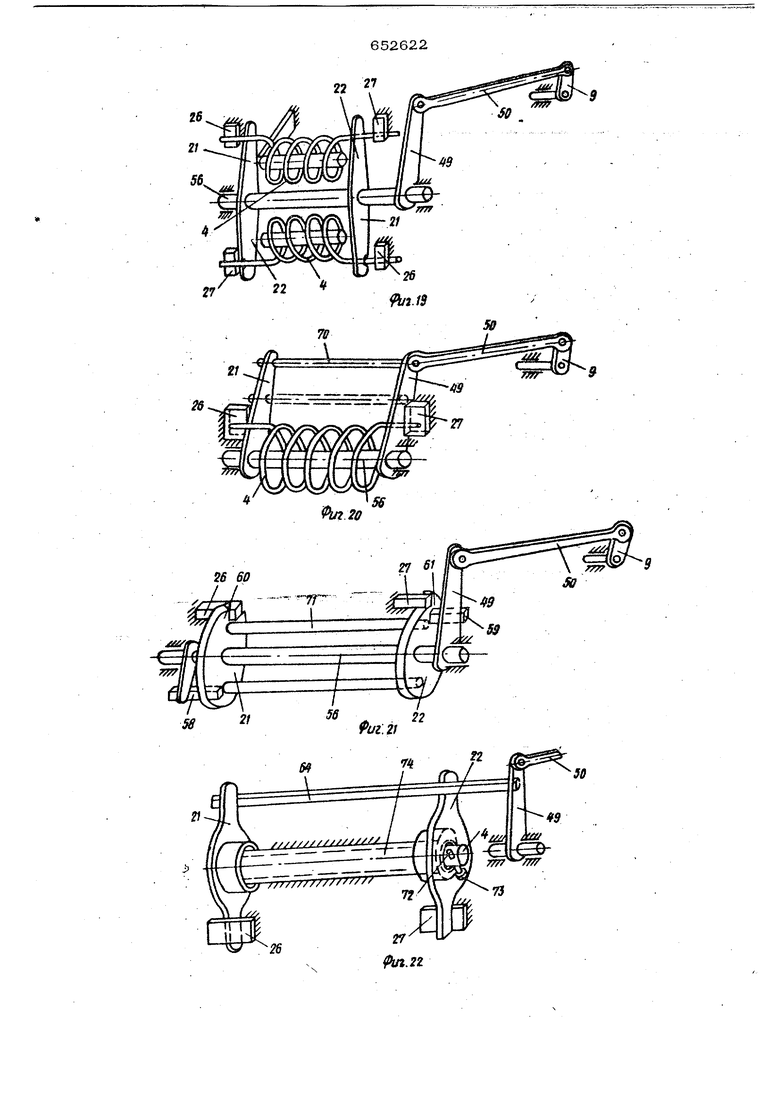
S описанного варианта выполнения приво- да. Здесь пружина 4 установлена несоосно валу 56. образующему с жестко соединенными с ним коромыслом 49 и ры-, чагом 62 рабочее звено возвратн1 -врашательного действиа. Концы пружины 4 заведены в отверстия подвижных упоров 21 и 22, выполненных в виде рычагов, установленных поворотно на оси 63. Взаимодействие рабочего эвена с упругим телом осуществляется соприкосновением коромысла 49 с выступом 59 подвижного упора 2.2. та воадействнем на соединен ный с ним конец пружины 4 либо рычага 62 с выступом 58 подвижного упора 21 и воздействием на соединенный с ним другой конец пружины 4. Попеременное опирание этих концов пружины на корпус осуществляется взаимодействием подвюкных упоров 21 и 22 с неподвижными упорами 26 и 27 корпуса. На фиг. 15 и 16 показаны еше два видоизменения варианта вьшолнения при.вода по фиг. 12 и 13. Здесь концы пруж шл 4 установлены аналогично фиг. 14 в подвижных упорах 21 и 22, попеременно оп раемых на упоры 26 и 27 корпуса и вращающихся на оси 63.Рабочее звено возвратно-вращательного действ ш обра ет коромысло 49, снабженное либо о ним выступом 64 (см. фиг, 15), поп ременно взаимодейс-паующИм с подвижн ми упорами 21 и 22, а через них с раэ пич1р(ыми концами пружины 4, либо двумя двумя-выступами 65 и 66 (см. фиг. 16 действующими аналогично. В остальном р бога привода не огличавтся ог описанной по фиг. 12 н 13. Реализация привода возможна не только при применении роликовой или щариковой муфты обгона, но и храповой, На фиг. 17 дана конструктивная схема, а на фиг. 18 - объемное изображение привода, состоящего из электродвигателя 42, приводящего во вращение червяк 43, червячное колесо 44 и жестко связанные с колесом вал 45 и эксцентрик 46. Эксцентрик 46 шатуном 47, щарнирно соединенным с рычагом 67, приводит последний в колебательное движение. При движении рычага 67 по часовой стрелке (см. фиг. 17) собачка 68 захватывает храповик 69, установленный свободно относительно рычага 67 и жест ко связанный с валом 8 привода н криво шипом 9, заставляя поворачиваться их по часовой стрелке. От кривошипа 9 шатуном 5О вращается также по часовой стрелке коромысло 49. Отличительной особенностью данного варианта является то, что подвижные упоры, между которыми расположена пружина 4, выполнены заодно с рабочим звеном коромыслом 49 путем жесткого соединения между собой коромысла, вала 56 и подвижногр упора 21, выполненного в виде рычага. Поскольку вал 56 жестко связал с коромьгслом.49, он также поворачивается на некоторый угол н подвижным упором 21 воздействует на один конец пружины, отводя его от неподвижного упора 26, в то время как другой ее конец взаимодействует с неподвижным упором 27, опираясь на него. Пружина 4 закручивается, деформируясь на некоторую величину. При обратном движении рычага 67 пружина 4 не может раскрутиться, так как храповик 69 стопорится стопорной собачкой, какв обычвьй храповых муфтах.Г После нескольких колебательных дви- / жений рычага 67 пружина 4 закручивается до максимальной деформации, кривошшшо-коромысловый механизм занимает первое мертвое положение (примерно при совпадении оси кривошипа 9 с горизонтальной осью, проведенной через центр вала 8 на фиг. 17). Закончено одно накопление энергии в упругом теле-. Пружине 4. При переходе этого мертвого положения под действием раскручивающейся пружины 4 подвижный упор 21, вал 56 н коромысло 49 быстро поворачиваются против часовой стрелки (см. фиг 17) и щатуном 50 увлекает кривошип 9. Последний совместно с валом 8 быстро вращается по часовой стрелке, т. е. в том же направлении, что к при накоплении энергии. Во время быстрого вращения вала 8 с него через кинематическую цепь передается энергия для приведения в действие подвижных контактов аппарата, при этом происходят свободный ход храповика 69 относительно рычага 67 и собачки 68 и рассоединение передач от двигателя к упругому телу. По достижении кривошипом 9 примерно вертикального положения, т. е. до совпадения его оси с вертикальной осью, проведенной через центр вала 8, пружина 4 раскрутится и ее конец (левый на фиг. 18) войдет в соприкосновение с упором 26 корпуса - упругое тело отдало накопленную энергаю для приведения в действие подвиж1Ш Х контактов аппарата. От электродвигателя 42 снова привг дится Б колебательное движение рьпаг 67, аналогично кривошип .9 поворачивается (ПО часовой стрелке (см. фиг. 17) и татуном 50 увлекает коромысло 49 и вал 56, заставляя их, вращаться npiyftiB чеа:о- вой стрелки. Коромысло 49 воздействует на другой конец пружины 4 (правый на фиг. 18), отводя его от упора 27, в то время как ее противоположный конец опи рается на упор 26 корпуса.; После нескольких колебательных движений рычага 67 пружина 4 снова закру чивается до максимальной деформации и крнвошипно-коромысловый механизм аают мает Второе мертвое положение (пример но при совпадении оси кривошипа 9 с гориз октальной осью, проведенной через центр вала 8 на фиг. 17). Закончено вто рое накопление энергии в пружине 4. При переходе второго мертвого полож ния под действием раскручивающейся пру жины 4 коромысло 49 быстро аов1 ачивается по часовой стрелке (см. фиг. 17) и шатуном 50 заставляет быстро вращат ся кривошип 9, вал 8 и храповик 69 по часовой стрелке. Происходит свободный х храповой муфты обгона, и в это время энергия S вала 8 отбирается для приведе ния в действие подвижных контактов аппа рата. По достижении кривошипом 9 примерн вертикального положения, т. е. до совпадения его оси с вертикальной осью, проведенной через центр вала 8, пружина 4 раскрутится и ее конец правый на фиг. 18) войдет в соприкосновение с упйром 27 корпуса - упругое тело отдалр энергию для приведения в действие подвижных контактов аппарата. На фиг, 19 приведен вариант вьшолнения привода, отличительной особенностью которого является то, что рабочее звено возвратно-вращательного действия выполнено в виде жестко связанного с коромыслом 49 вала 56, на котором установлено несколько подвижных упоров 21 и 22, жестко связанных с ним. Упоры 21 к 22 вьшолнены в виде рычагов. Они попеременно взаимодейст вуют с концами нескольких упругих тел - пружин кру1ения, в то время как их противоположные концы попеременно опираются на неподвижные упоры 26 и 27. На фиг. 2О приведено еще одно ввдо изменение привода по фиг. 17 и 18, отличительной особеннсютью которого является то, что коромысло 49 и подвиж- ный упор 21, попеременно вааимодейст Ьующие с одними концами упругого те.ла 4, попеременно опираемого другими концами на нетюдикжиьш j-nopbi 26 и 27, установлены на валу 56 поворотно. Синхронность движений дсютигается жестким j соединением их при помоищ прутка 70, который может быть установлен так же, как показано на фиг, 20 пунктиром. Такое выполнение рабочего звена, а . именно в виде жестко связанных между собой подвижных упоров не через вал, а при помопш прутка 7О, приме1гшмо и |К варианту привода на фиг. 13. При этом попеременное взаимодействие коромысла 49 и подвижного упора 21 с концами пружины 4 будет не непосредственным, как на фиг. 20, а через выступы 59 и 58 подвижных упоров 21 и 22, установленных с возможностью опирания на неподвижные упоры 26 и 27 и несущих концы упругого тела - пружины 4. На фиг. 21 показан вариант выполнения привода, в котором пружина кручения заменена упругими телами в виде упругих стержней 71. Концы стержней 71 соединены с подвижными упорами 21 и 22 выполненных в виде дисков, и при их относительном вращении стержни закручиваются, накапливая во время работы двигателя, или раскручиваются, отдавая ее для приведения в действие Подвижных контактов аппарата. Упругие стержни могут быть выполнены из металла или другого материала, например резины. Кроме того, вместо упругих стержней 71 можно установить йружины растяжения, шарнирно соединив их концы с подвижными упорами 21 и 22. Упругие тела могут быть выполнены также в виде комбинации нескольких типов пружины, например пружин растяжения и резиновых стержней. На фиг. 22 показан пример использования рабочего звена, выполненного, как на фиг. 15, т. е. в виде коромысла 49 с выступом 64, попеременно взаимодействующим с подвижными упорами 21 и 22, выполненными в виде двуплечих рычагов, попеременно опираемых на неподвижные упоры 26 к 27 несущих концы упругого тела 4 в виде упругого стержня, который работает на кручение. Каждый конец стержня для соединения с подвижными упорами 21 и 22 имеет отверстия, в которые входят шпильки 72, ввинчиваемые в бобышки 73, выполненные заодно с подвижными упорами, которые своими ступицами установлены поворотно на полом валу 74, жестко связанном с корпусом, внугри которого проходит упругое тело 4.
19
На фиг. 23 приведен вариант выпопнения привода, где рабочее звено - коромысло 49 попеременно взаимодействует с выступами 75 и 76, жестко связанными с подвижными упорами 21 и 22, вы- пблнейнь1МИ в виде дисков, которые несут концы упругого тепа 4, и через приливы 6О и 61 с неподвижными упорами 26 и 27. Крепление концов упругого стержня аналогично фиг. 22. Подвижные упоры (диски) свободно установлены на полом валу 74, на который также свободно надето коромысло 49. Подвижные упоры 21 и 22 могут быть установлены на валу свободно, а коромысло 49 - жестко связано с ним. Вал 74 в этом случае вращается на подшипниках. Упругий стержень 4 можно заменить многовитковой пружиной кручения как в этом примере, так и в примере на фиг, 22.
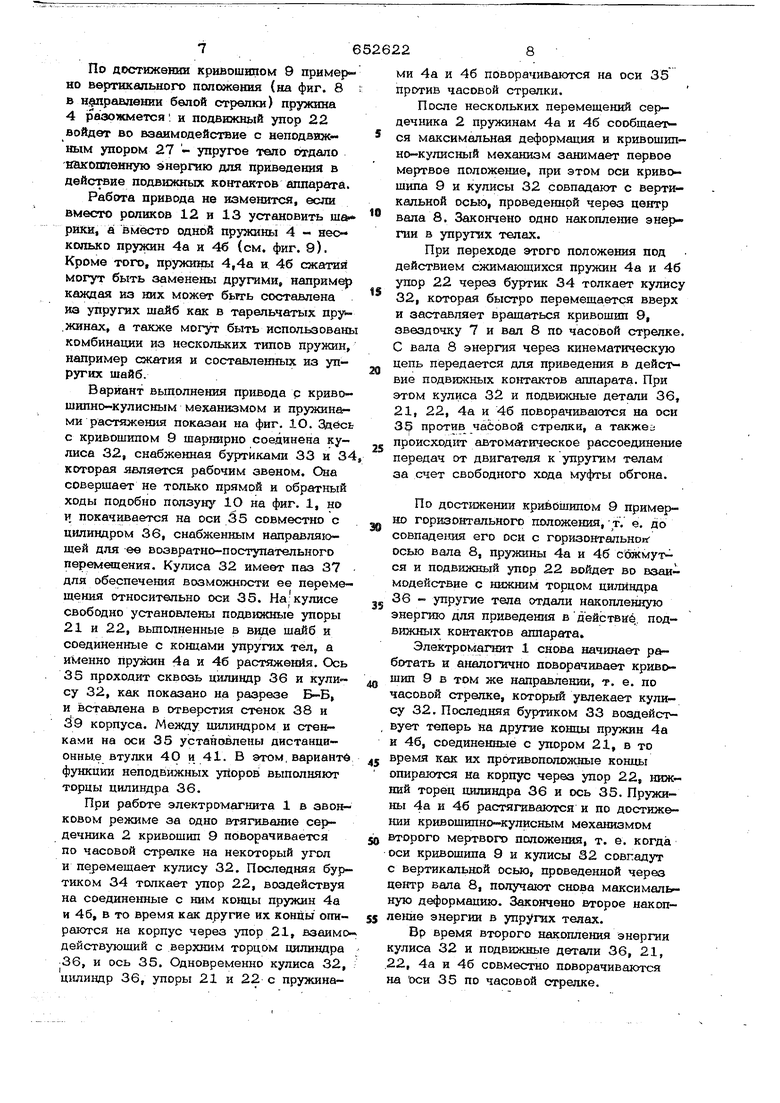
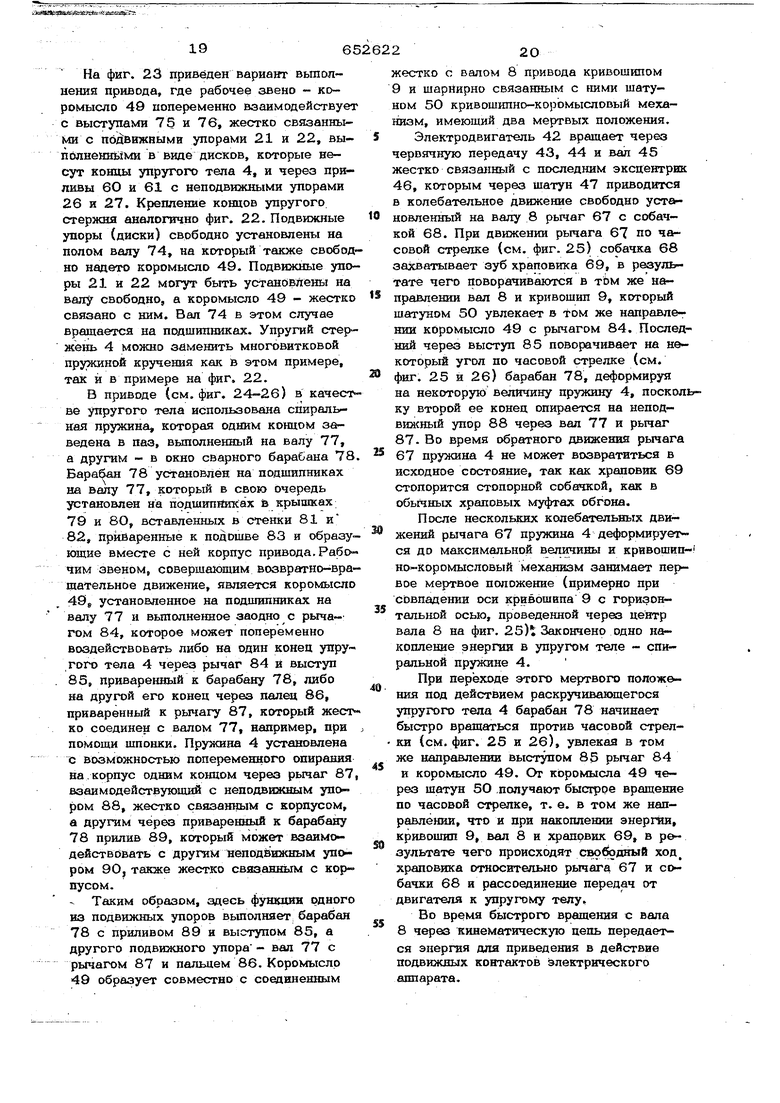
В приводе (см. фиг. 24-26) в качест ве упругого тела использована спиральная пружина, которая одним концом заведена в паз, выполненный на валу 77, а другим - в окно сварного барабана 78 Барабан 78 установлен на подшипниках на валу 77, который в свою очередь установлен на подшипйиках в крышках 79i и 8О, вставленных в стенки 81 и 82, приваренные к подошве 83 и образующие вместе с ней корпус привода. Рабочим звеном, совершающим возвратно-вращательное движение, является коромысло 49s установленное на подшипниках на валу 77 и выполне1шое заодно с рычагом 84, которое может попеременно воздействовать либо на один конец упругого тала 4 через рычаг 84 и выступ 85, приваренный к барабану 78, либо на другой его конец через палец 86, приваренный к рычагу 87, который жест ко соединен с валом 77, например, при помощи щпонки. Пружина 4 установлена с возможностью попеременного опирания на.корпус одним концом через рычаг 87, взаимодействующий с неподвижным упором 88, жестко связанным с корпусом, а другим через привареншдй к барабану 78 прилив 89, который может взаимодействовать с другам неподвижным упором 90, также жестко связанным с корпусом.
Таким образом, здесь функции одного из подвижных упоров выполняет барабан 78 с приливом 89 и выступом 85, а другого подвижного упора - вал 77 с рычагом 87 и пальцем 86. Коромысло 49 образует совместно с соединенным
652622
20
жестко с валом 8 привода кривошипом 9 и шарйирно связанным с ьшми шатуном 50 кривошипно-корЬмысловый механизм, имеющий два мертвых положения.
Электродвигатель 42 вращает через червячную передачу 43, 44 и вал 45 жестко связаннь1й с последним эксцентрик 46, которым через щатун 47 приводится в колебательное движение свободно установленный на валу 8 рычаг 67 с собачкой 68. При движении рычага 67 по часовой стрелке (см. фиг. 25) собачка 68 захватывает зуб храповика 69, в резул тате чего поворачиваются в тЬм же направлении вал 8 и кривошип 9, который шатуном 50 увлекает в том же направлении коромысло 49 с рычагом 84. Последний через выступ 85 поворачивает на некоторый угол по часовой стрелке (см. фиг. 25 и 26) барабан 78, деформируя на некоторую величину пружину 4, посколку второй ее конец опирается на неподвилсный упор 88 через вал 77 vi рычаг 87. Во время обратного движения рычага 67 пружина 4 не может возвратиться в исходное состояние, так как храповик 69 стопорится стопорной собачкой, как в обьгчных храповых муфтах обгона.
После нескольких колебательных движений рычага 67 пружина 4 деформируется до максимальной величины и кривошипно-коромысловый механизм занимает первое мертвое положение (примерно при совпадении оси кривошипа 9 с горизонтальной осью, проведенной через центр вала 8 на фиг. 25)t Закончено одно накопление энерпш в упругом теле - спиральной пружине 4.
При переходе этоп мертвого положения под действием раскручивающегося упругого тела 4 барабан 78 начинает быстро вращаться против часовой стрелки (см. фиг. 25 и 26), увлекая в том же направлении выступом 85 рычаг 84 и коромысло 49. От коромысла 49 через шатун 50 .получают быстрое вращение по часовой стрелке, т. е. в том же направлении, что и при накоплении энергии, кривошип 9, вал 8 и храпрвшс 69, в результате чего происходят свободный ход храповика относительно рычага 67 я собачки 68 и рассоединение передач от двигателя к упрупзму телу.
Во время быстрого вращения с вала 8 через кинематическую цепь передается энергия для приведения в действие подвижных контактов электрического аппарата. По достижении кривошипом 9 примерн вергикального положения (см. фиг, 251, г, е. до совпадения его оси с вертикальной осью, гфоведенной через центр вала 8, упругоетело 4 раскрутится и прилив, 89 барабана 78 войдет в Соприкосновение с упором 90 - упругое тело отдало энергию для приведения в действие подвижных контактов электрического аппарата. От электродвигателя 42 снова приводится в колебательное движение рычаг 6 аналогично кривошип 9 продолжает враще ние в том же направлении, т. е, по часовой стрелке (см. фиг. 25), и шатуном 5 увлекает ксромысло 49, заставляя его вращаться против часовой стрелки. Коромысло 49 через палец 86 рычага 87 поворачивает против часовой стрелки вал 77, увлекая в том же направлении заведенный в паз вала 77 конец упругого тела, в то вяремя как другой его конец опирается на упор 90 через прилив 89 барабана 78. После нескольких колебательных движений рычага 67 упругому телу сообщается максимальная деформация н крнвоши пно-коромысловый механизм занимает вто рое мертвое положение (примерно при сов падении оси врнвошипа 9 с горизонтальной осью, проведенной через центр вала 8 на фиг. 25). Закончено второе накопление энергии в упругом теле 4. При переходе второго мертвого положения под действием раскручивающегося упругого тела вал 77 быстро вращается по часовой стрелке и пальцем 86 рычага 87 увлекает коромысло 49 в том же направлении, а коромысло 49 (также по часовой стрелке) через шатун 5О - вал 8 и храповик 69. Благодаря свободному ходу звеньев храповой муфты обгона происходит рассоединение передач от двигателя к упругому телу. В это время с вала 8 энергия снова передается для при ведения в действие подвижных контактов аппарата. По достижении кривошипом 9 примерно вертикального положения, т. а. до совпадения его оси с вертикальной осью, проведенной через центр вала 8, упругое тело раскрутится и рычаг 87 войдет во взаимодействие с упором 88 - упругое тело второй раз отдало энергию для приведения в действие подвижных контактов аппарата. Если один конец спиральной пружины на фиг. 26 (гот, что заведен в окно б&6222. рабана) соединить, например, с подвяжным упором 22 (см. фнг. 14, на основе которой поясняется пример трано{юрмаиии), а другой вставить в паз оси 63, связав ее жестко со вторым подвижным упором 21, то без изменения остальных деталей можно легко осуществить еще один вариант привода. Проделав то же самое с :Приводом на фиг. 15 и 16, получают еще два варианта. Можно применить также несколько спиральных пружин, что легко осуществить аналогично применению нескольких пружин кручения и т, д. Во всех примерах за один оборот поворотного звена механизма с мертвыми положени5ами в предложенном приводе осуществляются два накопления энергии в в каждом упругом теле и последующие приведения в действие подвижных контактов аппарата. Следовательно, данный привод обеспечивает наименьшее время, необходимое на подготовку аппарата к срабатыванию, т. е. автоматическое повторное включение сразу же после отключения. Кроме того, привод обладает большей экономичностью, так как имеет незначительные перемещения вхолостую подвтгжных частей и, следовательно, меньший расход энергии от ясточн51ка. При этом повышается КПД привода. Наиболее предпочтительным является применение предложенного привода в качестве обпдаго для трех полюсов привода в трехполюсных аппаратах. Он также может применяться для однополюсных выключателей или в ка естве индивидуального привода на каждый полюс в трехполюсных аппаратах. Фррмула изобретения 1. Привод электрического аппарата, содержащий двигатель, соединенный через передачи и муфту обгона с рычажным механизмом, кривошип которого связан через кинематическую цепь с подвижными контактами аппарата, а рабочее звено, совершающее прямой и обратный ходы, - с одним концом упругого тела, другой конец которого связан с неподвижным упором, отличающийся тем, что, сцелью повышения быстродействия и экономичности, он дополнительно снабжен нецодвижным и подвижным упорами, упругое тело расцоложено между этими упорами при этом подвижные угюры связаны с ра- бочим звеном и их перемещение зависиг ог рабочего звена так, что при прямом ходе один из упоров воздействует на оди конец упругого гела, а при обратном ход рабочего звена другой упор воздействует на другой конец упругого тела, 2,Привод по п. 1, отличающийся тем, что подвижные упоры выполнены заодно с рабочим звеном. 3,Г%)ивод по пп, 1 н 2, о т я к - чающийся тем, что упругое тело выполнено в виде пружины сжатия 4,Привод по пп, 1и2, отличающийся тем, что упругое тело выполнено из нескольких упругих элементов, например пружинных шайб, 5,Привод по пп, 1 и 2, о т л и чающийся тем что упругое тело выполнено в виде пружины растяжения, 6,Щэивод по пп, 1 и 2, о т л и чающийся тем, что упругое тело выполнено в виде упругого стержня, например, из резины, 7,Привод по пп, 1и2, отличающийся тем, что упругое тело выполнено в виде пружины кручения, 8,Привод по пп, 1 и 2, отличающийся тем, что упругое тело выполнено в виде спиральной пружины, 9,Привод по п,8, отличающийся тем, что спиральная пружина помещена в барабане, установленном сжободно на валу, 10, по пп, 1-9, отлиающийся тем, что упругое тело выполнено из нескольких типов пружин, например пружины растяжения и резинового стержня. Источники информации, принятые во внимание при экспертизе 1,Патент ФРГ № 1О64597, кл, 21 с 40/50, 1968, 2, .Патент ФРГ № 1086784, кл, 21 с 45/О8, 197О.
s
11 W 23 2V 6 JO gj
| yx//// /////z
V/////X//////
//у Л //Х/ХХ/ХХ/ХХ/ //
-t-a--П
;w7/vv7 yxx/////x
JfS T7. ф ui.S. 25 а 9 ft
is
ti It
20
21 23
-US 22
m
гЗ Я
56
г
г
Х
jpiH
2У
г////
г/7 УУХ/ХХУХ//УХ/УД /////V//// / 2.23
W
ssssa s5ssi ss5
NScoC4NxS co X
rTlgJ T
- э /
f rfBiys V Suff.... I- r/ j
gy,XyiX X fyyjOO -/j
if9i4.ti.:-T;-i-.-.-,,..72
Й9
S3
-A
%.f 22
иг.25
