Изобретение относится к управлению колосниковым холодильником и может найти применение в промышлен-; ности строительных материалов, в химической промьшшенностн, в черной и цветной металлургии, других отраслях промьшшенности.
Цель изобретения - повьшение качества управления.
Сущнос-ть способа заключается в следующем.
Характер зависимости расхода воздуха через решетку холодильника со слоем клинкера на ней аналогичен характеру зависимости для сужающих устройств. Последняя имеет вид
iP с G,(1)
где ДР - разность давлений воздуха
под и над решёткой холодильника;
G - расход воздуха сквозь слой
клинкера;. с - коэффициент пропорциональ нрсти.
Величина С в выражении (1) является функцией многих переменных, но определяется в значительной степени высотой слоя клинкера на решетке, и его гранулометрическим составом.
В физическом смысле величина С - это газовая (воздушная) проницаемость слоя клинкера.
Величина давления Р под решетками холодильника на один-два порядка больше давления над решеткой. Йослед- нее составляет обычно 1-5 мм водяного столба и поддерживается стабильным. . Практически его можно принять равным атмосферному, а величину перепада давления дР на решетке заменить в
«(: Р1
О 1ч9 1C
сд
3 , 1А56225
I (О давлением Р под решеткой (в камере).
Тогда выражение (I) можно переписать, заменив дР на Р,:
(2)
.
G;
где 1 - номер камеры.
В способе осуществляется стабилизация двух величин из трех выражения (1) - давления Р воздуха и его расхода G.
Это обеспечивает стабильность третьего, ключевого параметра - газовой проницаемости (С) слоя клинкера на решетке.
При управлении холодильником над первой камерой формируется (генерируется) слой клинкера со стабильной
вляют управляемую подачу воздуха в первые две камеры холодильника. При необходимости управлять подачей воздуха в третью и последующие камеры (если холодильник имеет более трех камер)j они должны быть оснащены средствами контроля и регулирования аналогично второй камере. Аналогично
должна осуществляться и подача воздуха. При этом время запаздывания, определяемое блоком 7, должно быть индивидуальным для каждой: камеры.
Система автоматического регулирования управления работает следующим образом,
В установившемся режиме управления на решетках холодильника сформирован слой клинкера, который обеспе
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления колосниковым холодильником и устройство для его осуществления | 1981 |
|
SU962741A1 |
| Система автоматического управления процессом охлаждения клинкера в колосниковом холодильнике | 1987 |
|
SU1509343A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОЦЕССА ОХЛАЖДЕНИЯ КЛИНКЕРА В КОЛОСНИКОВОМ ХОЛОДИЛЬНИКЕ | 2009 |
|
RU2446120C2 |
| Способ автоматического управления процессом обжига клинкера во вращающейся печи | 1982 |
|
SU1043459A1 |
| Способ управления процессом охлаждения в колосниковом холодильнике | 1981 |
|
SU1013727A1 |
| Устройство для автоматического управления процессом охлаждения клинкера в колосниковом холодильнике | 1980 |
|
SU903684A1 |
| Способ автоматического регулирования теплового режима колосникового холодильника | 1977 |
|
SU662790A1 |
| Способ определения среднего размера гранул клинкера | 1981 |
|
SU989387A1 |
| Способ автоматического управления процессом охлаждения материала в колосниковом холодильнике | 1981 |
|
SU998841A1 |
| Способ охлаждения цементного клинкера в колосниковом холодильнике | 1982 |
|
SU1052489A1 |
Изобретение относится к управлению Колесниковым холодильником, может быть использовано в промышленности строительных материалов, в химической промьшшенности и позволяет повысить качество управления. Для достижения этой цели изменяют подачу воздуха во вторую камеру до стабилизации отношения величин давлений в камерах на стабилизируемом значении, изменяют подачу воздуха в первую камеру в зависимости от отклонения измеренной величины расхода воздуха в первую камеру от заданной величины и изменяют скорость решеток холодиль ника в зависимости от отклонения ве-. личины воздуха в первой камере от за данного значения. 1 ил.
35
газовой проницаемостью. Мерой газовой 20 чивает работу регуляторов 4, 6 и 9 проницаемости является соотношение величин Р и G согласно (2). Первую камеру холодильника в этом случае можно .рассматривать как физическую моj дель всего холодильника. Условия охI лаждения клинкера, формируемые над первой камерой, сохраняются для второй и последующих камер. При зтом, чем крупнее клинкер , тем дольше он задерживается в холодильнике, т.е. степень охлаждения клинкера меньше зависит от среднего размера его гранул. Этими фактами и объясняется по- вьш1ение эффективности (К1Щ) холодильника при одновременной стабильности
этого показателя.
,
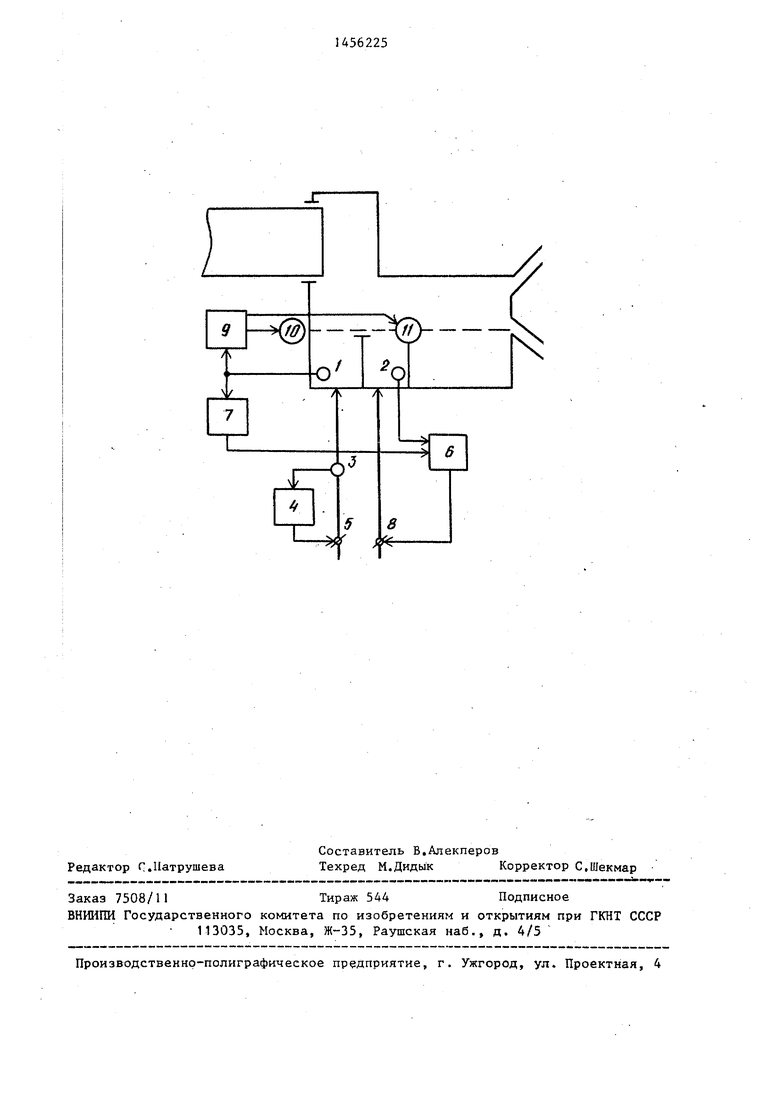
На чертеже приведена блок-схема Lсистемы автоматического управления, реализующая способ.
Система содержит датчики 1 и 2 давления соответственно в первой и второй камерах.
Контур стабилизации расхода воздуха в первую камеру состоит из датчика 3 расхода воздуха, который через регулятор 4 связан с шибером 5 на линии подачи воздуха в первую камеру. Входы регулятора 6 давления во второй камере соединены с выходом блока 7 запаздывания и датчиком 2 давления во второй камере, а выход с шибером 8 на линии подачи воздуха во вторую ка-ч меру. Вход регулятора 9 стабилизации давления в первой камере соединен с .. датчиком давленияj а выход - с электроприводами 10 и 11.
Приведенная схема поясняет суть способа на примере, когда осущест
в номинальном диапазоне. При этом величина расхода воздуха, подаваемо в.первую камеру, величина давления в первой камере и величина давления
25 во второй камере равны соответствую щим заданным величинам.
При увеличении, например, средне размера кусков клинкера давление в первой камере уменьшится, поскольку
30 увеличится газовая проницаемость слоя клинкера. Увеличится и расход воздуха в первую камеру.
При этом сигнал датчика 1 давлен уменьшится, а. сигнал датчика 3 расх да воздуха увеличится, В ответ на и менение указанных сигналов регулято 9 начнет уменьшать скорость решеток действуя на электроприводы 10 и П, регулятор 4 начнет закрывать шибер По прошествии времени переходных процессов в системе регулирования в личины давления в первой камере и расхода воздуха в первую камеру вно вернутся к заданным значениям. Наст
дд ПИТ новый установившийся режим, но высота слоя клинкера уже больше, а степень открытия шибера 5 меньше, ч в предыдущем установившемся режиме. В результате время пребывания клинкера в зоне охлаждения увеличится, газовая проницаемость слоя клинкера вернется к прежней величине. К преж ней величине вернется и количество тепла, снимаемое с клинкера и возgg вращаемое в печь.
При резких и сильных возмущениях действующих на систему регулировани давления в первой камере, могут име место колебания давления в первой
40
50
чивает работу регуляторов 4, 6 и 9
в номинальном диапазоне. При этом величина расхода воздуха, подаваемого в.первую камеру, величина давления в первой камере и величина давления
во второй камере равны соответствующим заданным величинам.
При увеличении, например, среднего размера кусков клинкера давление в первой камере уменьшится, поскольку
увеличится газовая проницаемость слоя клинкера. Увеличится и расход воздуха в первую камеру.
При этом сигнал датчика 1 давления уменьшится, а. сигнал датчика 3 расхода воздуха увеличится, В ответ на изменение указанных сигналов регулятор 9 начнет уменьшать скорость решеток, действуя на электроприводы 10 и П, регулятор 4 начнет закрывать шибер 5, По прошествии времени переходных процессов в системе регулирования величины давления в первой камере и расхода воздуха в первую камеру вновь вернутся к заданным значениям. Насту-
ПИТ новый установившийся режим, но высота слоя клинкера уже больше, а степень открытия шибера 5 меньше, чем в предыдущем установившемся режиме. В результате время пребывания клинкера в зоне охлаждения увеличится, газовая проницаемость слоя клинкера вернется к прежней величине. К прежней величине вернется и количество тепла, снимаемое с клинкера и возвращаемое в печь.
При резких и сильных возмущениях, действующих на систему регулирования давления в первой камере, могут иметь место колебания давления в первой
ны. При этом спустя время запаздывания Т аналогично начнет изменяться выходной сигнал блока 7 запаздывания.
Следовательно, спустя время начнет изменяться вычисляемая величина давления для второй камеры (Задание).
Если в первой камере имеет место уменьшение величины давления, то вычисляемая для второй камеры велнчи -. на давления спустя время начнет уменьшаться. Регулятор 6 начнет уменьшать степень открытия шибера 8. 15 второй камерах, задание отношения
При этом уменьшится давление воз- давления воздуха во второй камере к
печь.
Система автоматического управлен колосниковым холодильником позволит обеспечить стабильность работы печн го агрегата, снижение удельного рас хода топлива на обжиг клинкера,
10 Формула изобретения
Способ автоматического управлеии колосниковым холодильником включающи измерение давления воздуха в первой
духа и во второй камере. При увеличении давления в первой камере произойдет автоматически управляемое повышение давления и во второй камере, но спустя время Г , При увеличении вручную величины заданного давления регуг лятору 9 произойдет автоматическре увеличение задания регулятору 6 спустя время С ,
Уменьшение размеров гранул кпинкег- ра вызовет-увеличение скорости решеток холодильника, уменьшение времени пребывания клинкера в холодильнике.
давлению воздуха в первой камере с учетом времени транспортного запазды вания материала и изменение подачи
20 воздуха во вторую камеру до достижения отношения давления воздуха во второй камере к давлению воздуха в первой камере заданного значения, отличающийся тем, что, с
25 целью повышения качества управления, измеряют расход воздуха в первую кагн. меру, изменяют подачу воздуха в первую камеру и изменяют скорость решети
ток холодильника, причем изменение Уменьшение количества клинкера, по-30 подачи воздуха в первую камеру осуще- ступающего.из печи (как известно клин- ствляют в зависимости от отклонения кер выходит из печи волнами), вызовет замедление скорости решеток и более глубокое охлаждение клинкера.
Увеличение количества клинкера вызовет увеличение скорости решеток.
указанных ситуациях обеспечивается необходимое охпаждение клинизмеренной величины расхода воздуха в первую камеру от заданной величины, А изменение скорости решеток холодШть- ЗЕ ника осуществляют в зависимости от отклонения величины давления воздуха в первой камере от заданного значения.
второй камерах, задание отношения
печь.
Система автоматического управления колосниковым холодильником позволит обеспечить стабильность работы печного агрегата, снижение удельного рас хода топлива на обжиг клинкера,
Формула изобретения
Способ автоматического управлеиия колосниковым холодильником включающий измерение давления воздуха в первой и
давлению воздуха в первой камере с учетом времени транспортного запазды вания материала и изменение подачи
воздуха во вторую камеру до достижения отношения давления воздуха во второй камере к давлению воздуха в первой камере заданного значения, отличающийся тем, что, с
целью повышения качества управления, измеряют расход воздуха в первую кагн. меру, изменяют подачу воздуха в первую камеру и изменяют скорость решети;
ток холодильника, причем изменение подачи воздуха в первую камеру осуще- ствляют в зависимости от отклонения
измеренной величины расхода воздуха в первую камеру от заданной величины, А изменение скорости решеток холодШть- ника осуществляют в зависимости от отклонения величины давления воздуха в первой камере от заданного значения.
| Способ автоматического управления колосниковым холодильником и устройство для его осуществления | 1981 |
|
SU962741A1 |
| кл | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| . | |||
