Изобретение -относится к электротехнике и может быть использовано в вентильном электроприводе, системах управления электрических машин, в вентильных двигателях и асинхрони- зированных синхронных „мапмнах.
Целью изобретения является расширение функ,циональных возможностей датчика положения ротора.
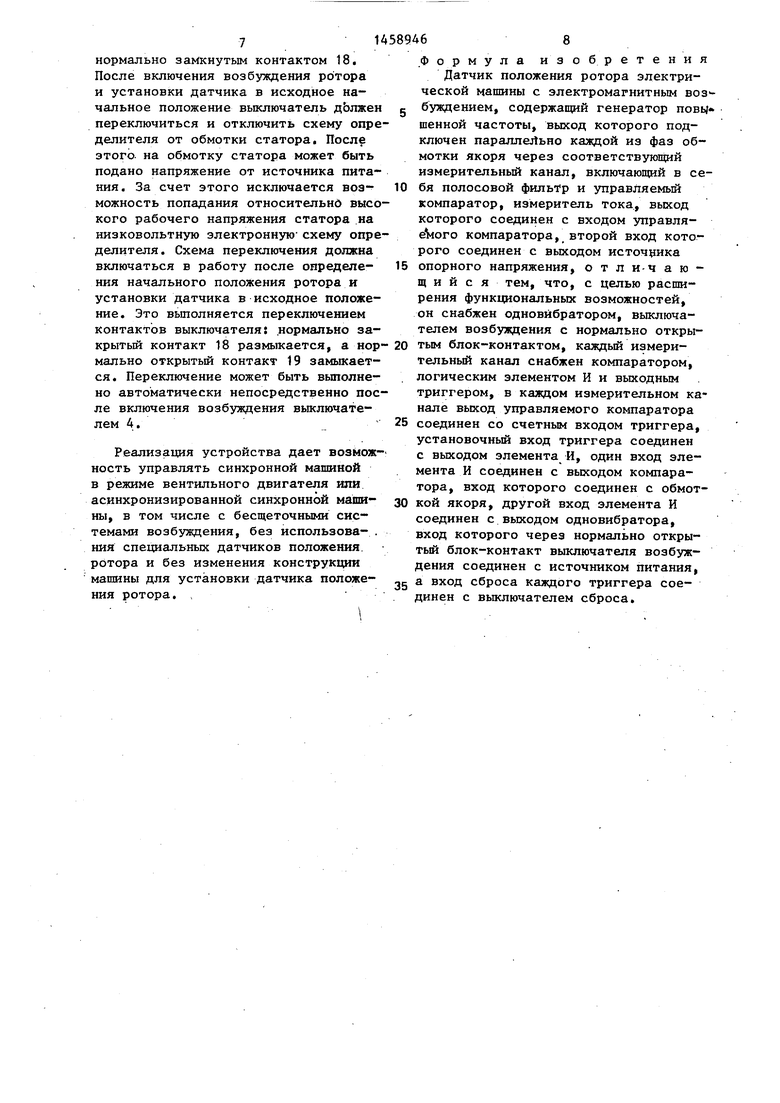
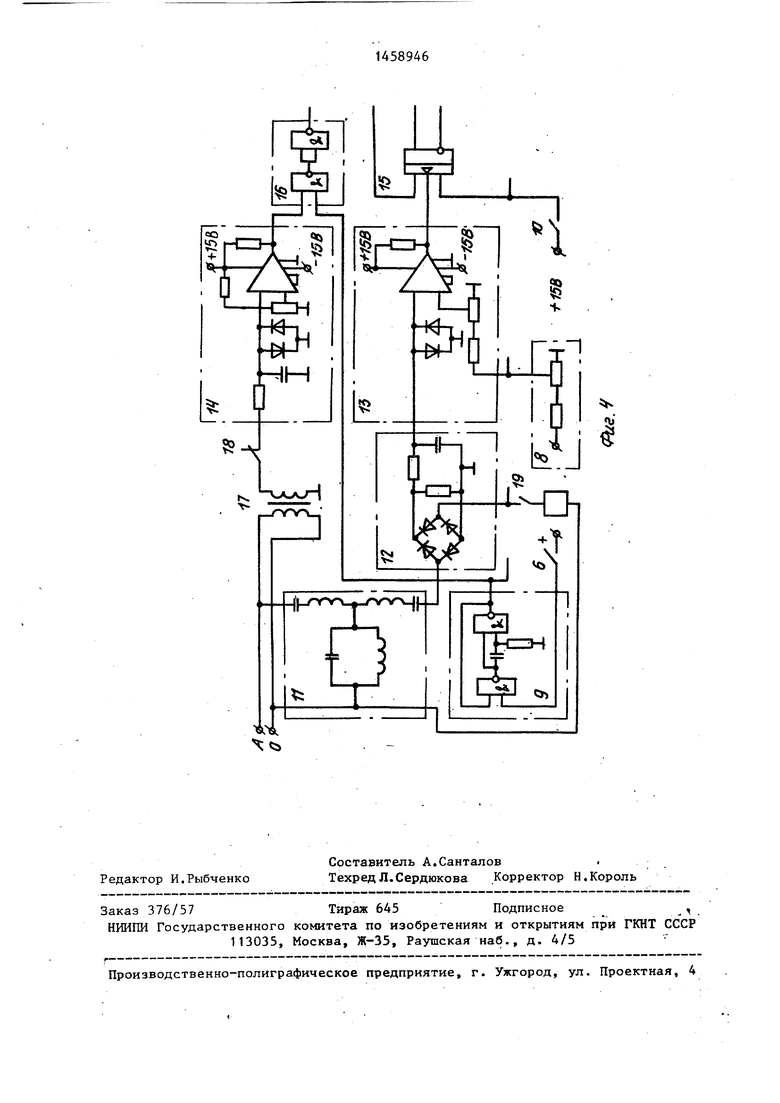
На фиг.1 приведена электрическая- структурная схема датчика положения ротора электрической машины; на фиг.2 - временные диаграммы напряжен НИИ и токов в его узлах на фиг.З - временные диаграммы, поясняющие, работу определителя начального положения ротора на фиг.4 - принципиальная электрическая схема датчика.
В..качестве электрической машины рассматривается синхронный двигатель с бесщеточной системой возбуждения. Машина содержит синхронный двигатель с обмоткой 1 якоря, обмоткой 2 индуктора и асинхронный возбудитель, уста- новленный на валу машины (фиг.1). Обмотка якоря двигателя соединена с источником переменного тока регулируемой частоты и напряжения, например с тиристорным преобразователем час- тоты. Фазы обмотки и источника обозначены А, В, С. Асинхронный возбудитель содержит статорную обмотку 3 возбуждения, которая соединена с источником переменного тока с напряже- нием Ug через выключатель 4 с нормально открытыми контактами, и роторную обмотку 5 якоря, которая соединена с роторной обмоткой 2 индуктора двигателя через ..выпрямитель 6, уста- новленный на роторе машины. Датчик положения ротора содержит выклюнател 4 в цепи обмотки возбуждения .возбудителя, генератор 7 высокой частоты, ИСТОЧНИК 8 опорного напряжения, одно вибратор 9, выключатель 10 сброса, а также в каждой фазе полосовой . фильтр 11, амплитудный демодулятор 12 тока, управляемый компаратор 13, ком паратрр 14, триггер 15 и -элемент COB падения И 16.
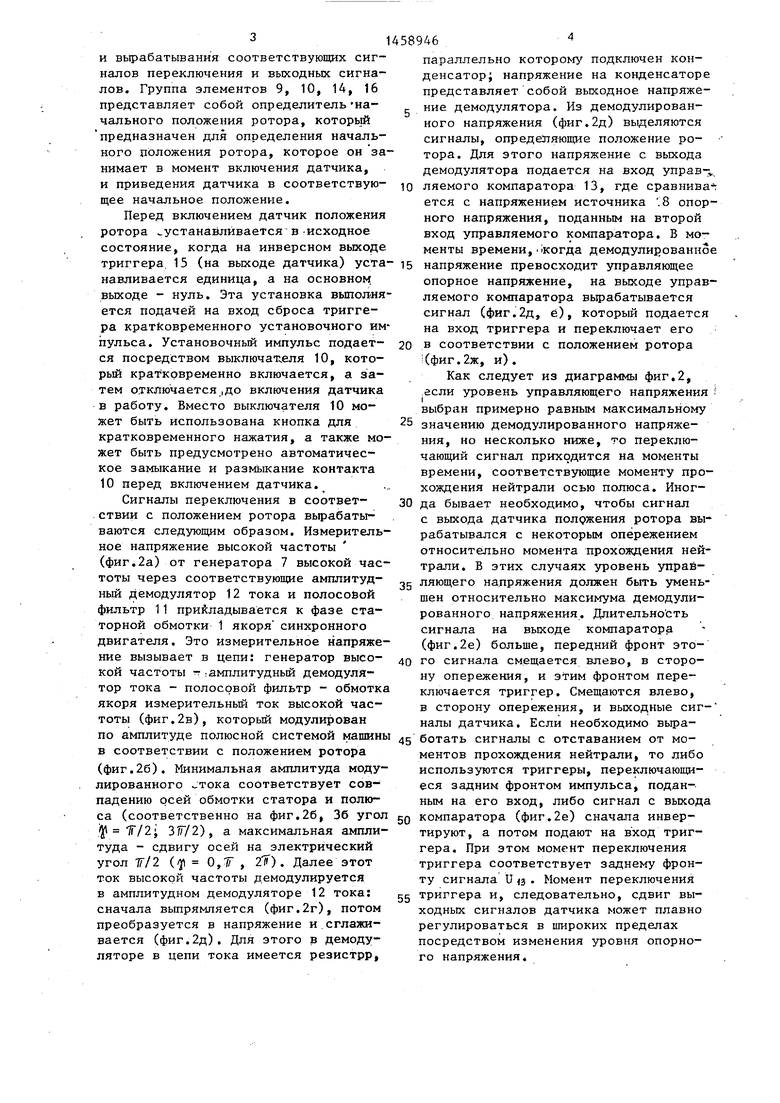
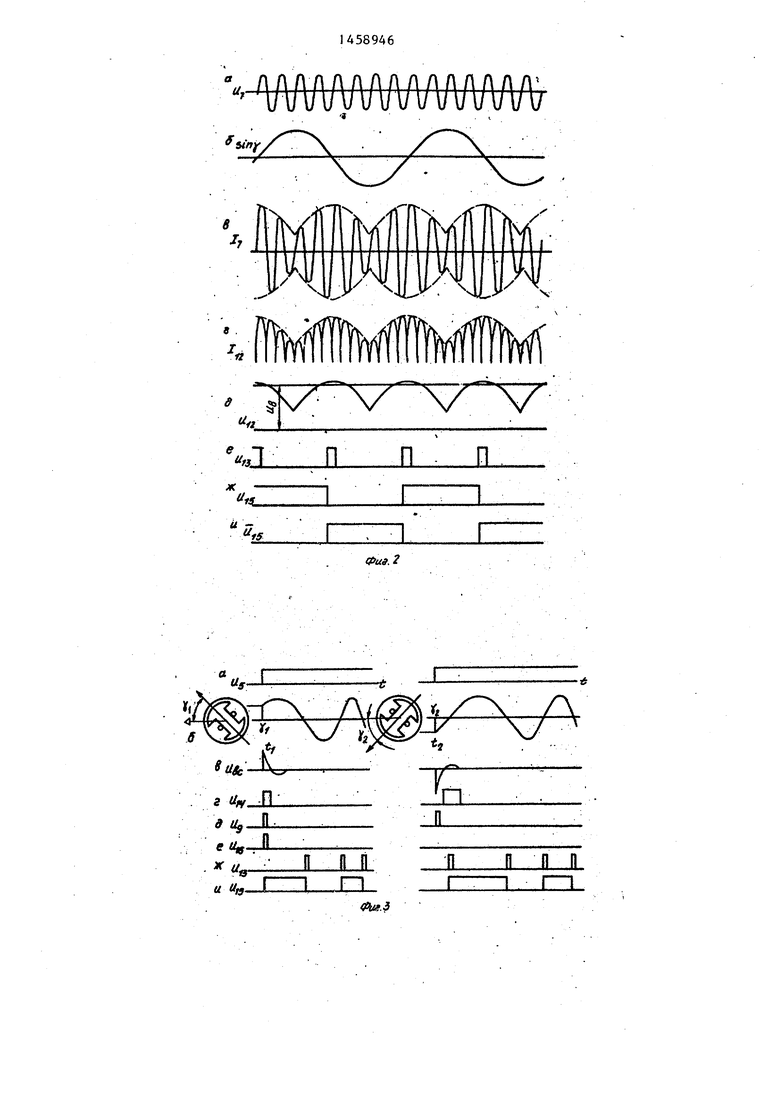
На временных диаграммах фиг.2 изображены: Ur - измерительное напряжение высокой частоты, приложенное к обмотке статора; sin j - угловое положение ротора, изображенное синусоидальной функцией угла между осью полюса ротора и плоскостью эквивал. лентного витка данной фазы обмотки
статора 1, - модулированный измерительный ток в цепи обмотки статора , - выпрямленный модулированньШ ток в амплитудном демодуляторе, тока; напряжение на выходе амплитудного демодулятора тока; - сигналы на выходе управляемого компаратора и 15 - напряжение на основном выходе триггера, соответствующее нахождению полюса положительной полярности в зоне полюсного деления данной фазы статора , U.5 - напряжение на инверсном выходе триггера, соответствующее нахождению полюса отрицательной полярности в зоне полюсного деления данной фазы статора. Сигналы и являются выходными сигналам 5 датчика.
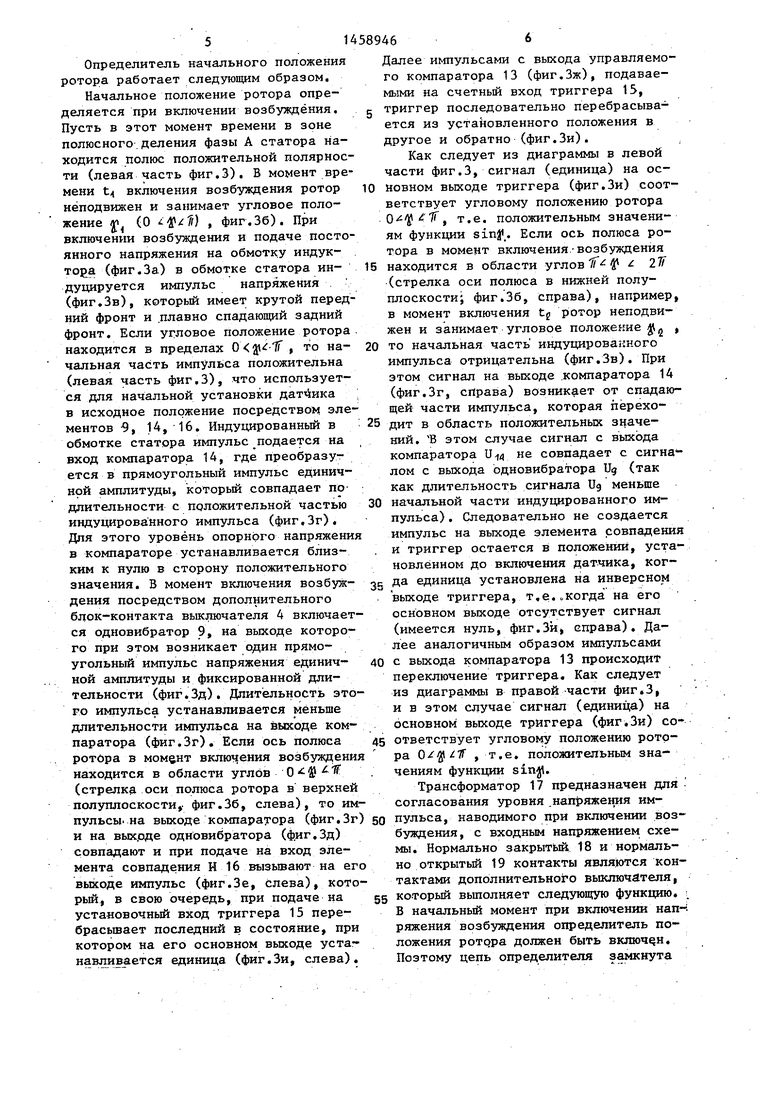
На диаграммах фиг.З изображены: U5 напряжение возбуждения, прило- женное к обмотке индуктора синхронной машины; на фиг.36 - угловое положение ротора, изображенное синусоидальной функцией угла между осью полюса ротора и плоскостью эквивалентного витка фазы обмотки статора, диаграмма изображает процесс разгона ротора от неподвижного состояния U0C - импульс напряжения, наведенного в статорной обмотке при включении напряжения возбужденияj сигнал на выходе компаратора; Ug - сигнал на выходе одновибратора , U - сигнал на выходе элемента совпадения И, который подается на установочный вход триггераi и,3 - сигналы на выходе управляемого компаратора, которые подаются на счетньй вход триггера; и,5 - напряжение на основном выходе триггера, соответствующее на- хождению полюса положительной поляр- ности в зоне полюсного деления дан- ной фазы статора. Левая часть диаграммы соответствует тому исходному положению ротора, когда в зоне полюсного деления фазы статора находится полюс положительной полярности (О 1 i ТГ ), а правая часть - полюс отрицательной полярности (IT/ у 2)
На фиг.4 изображены также трансформатор 17 и выключатель с нормально закрытым контактом 18 и нормально открытым контактом 19.
Датчик положения ротора работает следующим образом.
Группа элементов 7, 8, 11,12, 13 15 предназначена для фиксирования моментов прохождения ротором нейтр а- ли (или другого заданного положения)
и вырабатывания соответствующих сигналов переключения и выходных сигналов. Группа элементов 9, 10, 14, 16 представляет собой определитель начального положения ротора, который предназначен для определения начального положения ротора, которое он занимает в момент включения датчика.
параллельно котором: подключен конденсатор; напряжение на конденсаторе представляет собой выходное напряжение демодулятора. Из демодулирован- ного напряжения (фиг.2д) выделяются сигналы, определяющие положение ротора. Для этого напряжение с выхода демодулятора подается на вход управ%.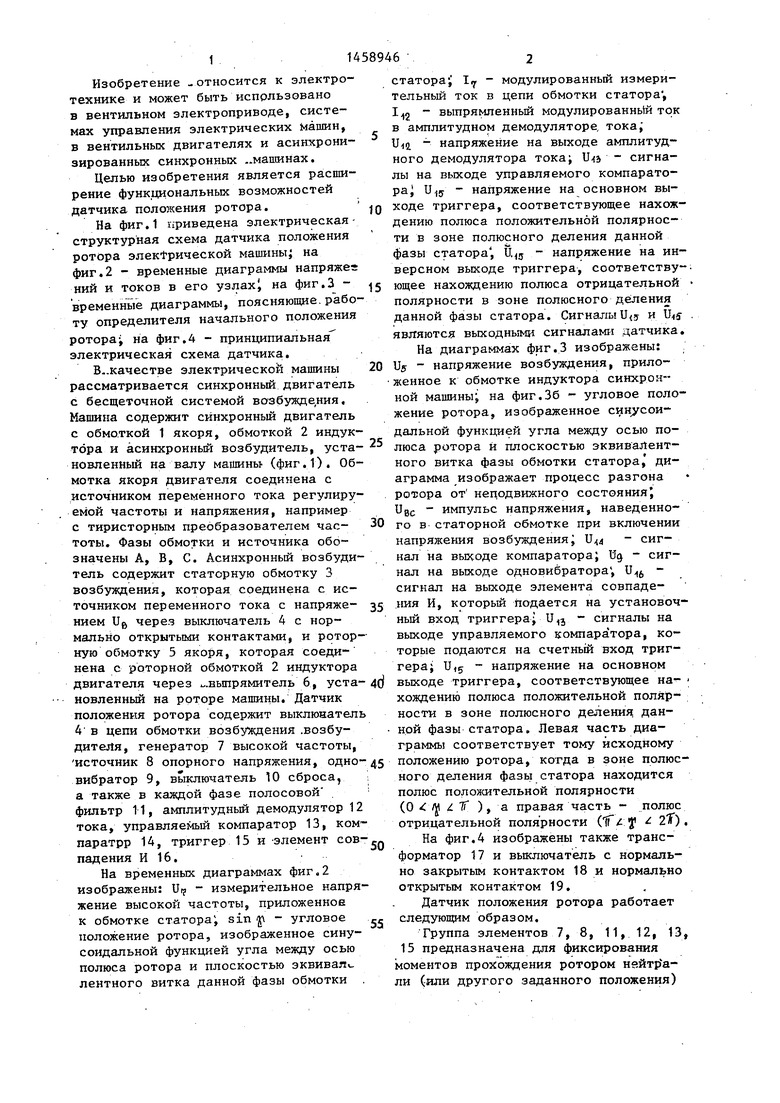
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пуска синхронной машины | 1986 |
|
SU1394381A1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Электропривод переменного тока | 1988 |
|
SU1603515A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Вентильный двигатель | 1988 |
|
SU1557663A1 |
| Прибор для контроля несимметрии расположения зубцов магнитопровода электрической машины | 1981 |
|
SU1018065A1 |
| Вентильный электродвигатель | 1984 |
|
SU1257770A1 |
| Электропривод переменного тока | 1985 |
|
SU1295499A1 |
| Бесконтактный электродвигатель постоянного тока | 1983 |
|
SU1192056A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
Изобретение относится к электро- и может быть использовано в вентильном электроприводе, системах управления элек-ррических машин, в вентильных двигателях и асинхрони- зированных синхронных машинах. Целью изобретения является расширение функциональных возможностей. В датчике используется выключатель 4 в цепи возбуждения машины. Введены генератор 7 высокой частоты, источник 8 опорного напряжения, одновибратор 9 . и выключатель 10 сброса. В каждз о фазу уведены полосовой фильтр 11, амплитудный демодулятор 12 тока, управляемый компаратор 13, компаратор 14, триггер 15 и элемент совпадения И 16. В каждой фазе статорной обмот- KW пропускается измерительный ток высокой частоты, который модулируется до амплитуде полюсной системой машины. Из этого тока наделяются модулирующие сигналы, которые преобразуются в. выходные сигналы датчика положения ротора. Датчик приводится в исходное положение соответствующее исходному положению ротора в момент включения, сигналом, наведенным в статорной оймотке, в момент включения возбуждения. 4 ил. с $ (Л ел 00 со 4 О tpuSi
и приведения датчика в соответствую- д ляемого компаратора 13, где сравнива
щее начальное положение.
Перед включением датчик положения ротора устанавливается в -исходное состояние, когда на инверсном выходе
триггера, 15 (на выходе датчика) уста- 15 напряжение превосходит управляющее навливается единица, а на основном опорное напряжение, на выходе управ- выходе - нуль. Эта установка вьтолня- ляемого компаратора вырабатывается
ется с напряжением источника опорного напряжения, поданным на второй вход управляемого компаратора. В моменты времени, .«огда демодулированное
ется подачей на вход сброса триггера KpaTkoBpeMeHHoro установочного импульса. Установочный импульс подается посредством выключат еля 10, который кратковременно включается, а затем отключается Iдо включения датчика в работу. Вместо выключателя 10 может быть использована кнопка для кратковременного нажатия, а также может быть предусмотрено автоматическое замыкание и размьжание контакта 10 перед включением датчика.
Сигналы переключения в соответствии с положением ротора вырабатываются следующим образом. Измерительное напряжение высокой частоты (фиг.2а) от генератора 7 высокой чассигнал (фиг.2д, е), который подается на вход триггера и переключает его
20 в соответствии с положением ротора ;(фиг.2ж, и).
Как следует из диаграммы фиг.2, если уровень управляющего напряжения выбран примерно равным максимальному
25 значению демодулированного напряжения, но несколько ниже, го переключающий сигнал приходится на моменты времени, соответствующие моменту прохождения нейтрали осью полюса. Иног- 30 да бывает необходимо, чтобы сигнал с выхода датчика положения ротора вырабатывался с некоторым опережением относительно момента прохождения нейтрали. В этих случаях уровень управ- тоты через соответствующие амплитуд- ляющего напряжения должен быть умень- ный демодулятор 12 тока и полосовой щен относительно максимума демодулированного напряжения. Длительность сигнала на выходе компаратора (фиг.2е) больше, передний фронт это- 40 го сигнала смещается влево, в сторону опережения, и этим фронтом переключается триггер. Смещаются влево, в сторону опережения, и выходные сиг- налы датчика. Если необходимо выра- по амплитуде полюсной системой машины g ботать сигналы с отставанием от мо- в соответствии с положением ротора ментов прохождения нейтрали, то либо (фиг.26). Минимальная амплитуда моду- используются триггеры, переключающи- лированного тока соответствует сов- еся задним фронтом импульса, подан- падению осей обмотки статора и полю- ным на его вход, либо сигнал с выхода са (соответственно на фиг.26, Зб угол JQ компаратора (фиг.2е) сначала инвер- iy T/2j 3F/2), а максимальная ампли- тируют, а потом подают на вход триггера. При этом момент переключения триггера соответствует заднему фронту сигнала U з Момент переключения 55 триггера и, следовательно, сдвиг выходных сигналов датчика может плавно регулироваться в широких пределах посредством изменения уровня опорного напряжения.
фильтр 11 прикладывается к фазе ста- торной обмотки 1 якоря синхронного двигателя. Это измерительное напряжение вызывает в цепи: генератор высокой частоты -:амплитудный демодулятор тока - полосовой фильтр - обмотка якоря измерительный ток высокой частоты (фиг.2в), который модулирован
туда - сдвигу осей на электрический угол 7Г/2 (/Jl 0,Т , 2Т) . Далее этот ток высокой частоты демодулируется в амплитудном демодуляторе 12 тока: сначала выпрямляется (фиг.2г), потом преобразуется в напряжение и.сглаживается (фиг.2д). Для этого в демодуляторе в цепи тока имеется резистрр,
напряжение превосходит управляющее опорное напряжение, на выходе управ- ляемого компаратора вырабатывается
ется с напряжением источника опорного напряжения, поданным на второй вход управляемого компаратора. В моменты времени, .«огда демодулированное
сигнал (фиг.2д, е), который подается на вход триггера и переключает его
20 в соответствии с положением ротора ;(фиг.2ж, и).
Как следует из диаграммы фиг.2, если уровень управляющего напряжения выбран примерно равным максимальному
25 значению демодулированного напряжения, но несколько ниже, го переклюОпределитель начального положения ротора работает следующим образом.
Начальное положение ротора определяется при включении возбуждения. Пусть в этот момент времени в зоне полюсного.деления фазы А статора находится полюс положительной полярности (левая часть фиг.З). В момент времени t включения возбуждения ротор неподвижен и занимает угловое положение у (О fi} , фиг.36). При включении возбуждения и подаче постоянного напряжения на обмотк.у индук- (фиг.За) в обмотке статора индуцируется импульс напряжения (фиг.Зв), который имеет крутой передний фронт и плавно спадающий задний фронт. Если угловое положение ротора находится в пределах , то начальная часть импульса положительна (левая часть фиг.З), что используется для начальной установки : в исходное положение посредством элементов -9, 14, 16. Индуцированный в обмотке статора импульс подается на , вход компаратора 14, где преобразуется в прямоугольный импульс единич- нрй амплитуды, который совпадает по- : длительности с положительной частью индуцированного импульса (фиг.Зг). Для этого уровень опорного напряжения в компараторе устанавливается близким к нулю в сторону положительного значения. В момент включения возбуждения посредством дополнительного блок-контакта выключателя 4 включается одновибратор 9, на выходе которого при этом возникает один прямоугольный импульс напряжения единичной амплитуды и фиксированной длительности (фиг.Зд). Длительность этого импульса устанавливается меньше длительности импульса на выходе компаратора (фиг.Зг), Если ось полюса ротбра в момент включения возбуждения находится в области угпов (стрелка оси полюса ротора в верхней полуплоскости,, фиг.36, слева), то им14589466
Далее иьшульсами с выхода управляемого компаратора 13 (фиг.Зж), подаваемыми на счетный вход триггера IS, с триггер последовательно перебрасывается из установленного положения в другое и обратно (фиг.Зи).
Как следует из диаграммы в левой части фиг.З, сигнал (единица) на ос- 10 новном выходе триггера (фиг.Зи) соответствует угловому положению ротора ., т.е. положительным значениям функции sinjt,. Если ось полюса ротора в момент включения/возбуждения 15 находится в области углов ТГ 2Tf (стрелка оси полюса в нижней полуплоскости; фиг.36, справа), например, в момент включения tg ротор неподвижен и занимает угловое положение 20 то начальная часть индуцированного импульса отрицательна (фиг.Зв). При этом сигнал на выходе .компаратора 14 (фиг.Зг, справа) возникает от спадающей части импульса, которая пёрехо- 25 дит в область положительных значений. В этом случае сигнал с выхода компаратора 15 не совпадает с сигналом с выхода одновибратора Vg (так как длительность сигнала Ug меньше 30 начальной части индуцированного импульса) . Следовательно не создается импульс на выходе элемента совпадения и триггер остается в положении, установленном до включения датчика, ког- .jg да единица установлена на инверсном . выходе триггера, т,е;. .когда на его основном выходе отсутствует сигнал (имеется нуль, фиг.Зи, справа). Далее аналогичным образом импульсами 40 с выхода компаратора 13 происходит переключение триггера. Как следует из диаграммы в правой части фиг.З, и в этом случае сигнал (единица) на основном выходе триггера (фиг,3и) со- 45 ответствует угловому положению ротора , т.е. положительным значениям функции sin.
Трансформатор 17 предназначен для согласования уровня .напряжения импульсы, на выходе компаратора (фиг.Зг) во пульса, наводимого при включении воз- и на выхрде одновибратора (фиг.Зд) буждения, с входным напряжением схеНормально закрытый 18 и нормальсовпадают и при подаче на вход элемента совпадения Н 16 вызьшают на его выходе импульс (фиг.Зе, слева), который, в свою очередь, при подаче на установочный вход триггера 15 пере- брасьшает последний в состояние, при котором на его основном выходе устаг навливается единица (фиг.Зи, слева).
мы.
но открытый 19 контакты явля|отся контактами дополнительного выключателя, 55 который вьшолняет следующую функцию, В начальный момент при включении нап- ряжения возбуждения определитель положения poTQpa должен быть включен. Поэтому цепь определителя замкнута
Нормально закрытый 18 и нормальмы.
но открытый 19 контакты явля|отся контактами дополнительного выключателя, 55 который вьшолняет следующую функцию, В начальный момент при включении нап- ряжения возбуждения определитель положения poTQpa должен быть включен. Поэтому цепь определителя замкнута
71458946
нормально замкнутым контактом 18. После включения возбуждения ротора и установки датчика в исходное начальное положение выключатель дЬлжен переключиться и отключить схему определителя от обмотки статора. После этого на обмотку статора может быть подано напряжение от источника питачше кл мо из
ния. За счет этого исключается воз- 10 бя полосовой фильтр и управляемый
можность попадания относительно высокого рабочего напряжения статора на низковольтную электронную схему определителя. Схема переключения должна включаться в работу после определения начального положения ротора и установки датчика в исходное положение. Это вьшолняется переключением контактов выключателя; нормально закомпаратор, измеритель тока, выход которого соединен с входом управля- eVioro компаратора, второй вход которого соединен с выходом источника
л и-ч а ю 15 опорного напряжения, о т
щ и и с я тем, что, с целью расширения функциональных возможностей, он снабжен одновйбратором, выключателем возбуждения с нормально откры- крытый контакт 18 размыкается, а нор- 20 тым блок-контактом, каждый измери- мально открытый контакт 19 замыкает- тельный канал снабжен компаратором, ся. Переключение может быть вьшолне- логическим элементом И и выходным
но автоматически непосредственно после включения возбуждения выключателем 4...
Реализация устройства дает возможность управлять синхронной машиной в режиме вентильного двигателя или асинхронизированной синхронной машины, в том числе с бесщеточными системами возбуждения, без использова- . ния специальных датчиков положения, ротора и без изменения конструкции машины для установки датчика положения ротора. ,
8
Формула изобретения Датчик положения ротора электрической машины с электромагнитным BOS буждением, содержащий генератор повы шенной частоты, выход которого подключен параллельно каждой из фаз обмотки якоря через соответствующий измерительный канал, включающий в секомпаратор, измеритель тока, выход которого соединен с входом управля- eVioro компаратора, второй вход которого соединен с выходом источника
л и-ч а ю опорного напряжения, о т
триггером, в каждом измерительном канале выход управляемого компаратора
25 соединен со счетным входом триггера, установочный вход триггера соединен с выходом элемента И, один вход зле- мента И соединен с выходом компаратора, вход которого соединен с обмот30 кой якоря, другой вход элемента И соединен с выходом одновибратора, вход которого через нормально открытый блок-контакт выключателя возбуждения соединен с источником питания,
35 а вход сброса каждого триггера соединен с выключателем сброса.
П
и.
fz
v / л/ V
л
и а„.
П
л
(
50Й1
C5
L-Q
. J I 4
.Т
| Способ пуска синхронной машины | 1978 |
|
SU921006A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА ЯВНОПОЛЮСНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 0 |
|
SU392327A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
