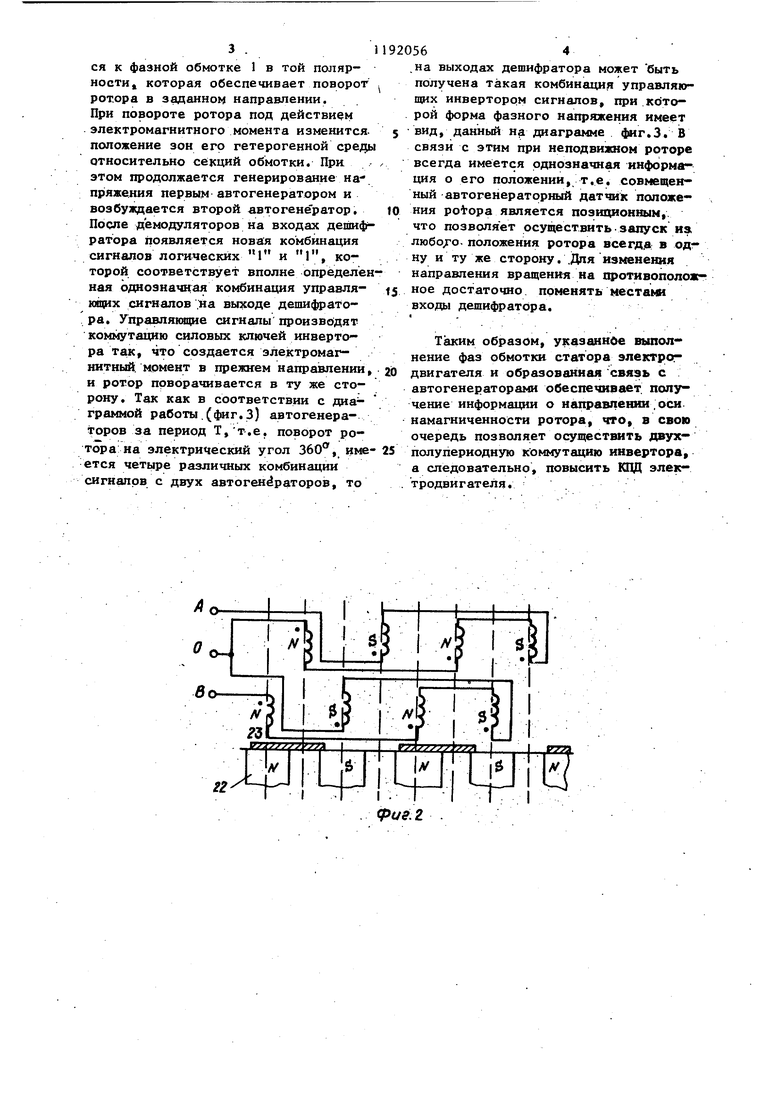
Изобретение относится к .электроTBXHHKie и может быть использовано в гироскопических электромеханических устройствах. Целью изобретения является повы.шение КПД. . , На фиг.1 приведем пример выполнения бесконтактного электродвигате постоянного тока с совмещенным датчиком углового положения ротора, выполненного на базе синхронной двухфа ной машины; на фиг.2,- схема соединения и взаимное расположение секций обмотки статора электродвигателя; на фиг.3 - временные диаграммы, поясняю щие работу высокочастотного полупроводникового автогенератора, и форма фазного напряжения (U, UB). Бесконтактный электродвигатель постоянного тока содержит .статор с двухфазной (в общем случае многофазной обмоткой, фазы 1 и 2 которой Составлены из двух групп одноименно ПОЛЮСНЫХ секций. Одна группа секции в .фазе 1 обмотки статора зашунтиро- вана конденсатором 3, а в фазе 2 конденсатором 4. Электродвигатель содержит высокочастотные полупроводниковые автогенераторы по числу фаз обмотки статора, входы которых подключены к источнику питания. Высокочастотные автогенераторы в данном случае выполнены на транзисторах 5 и 6,. смещение на базу которых ется. с делителей 7 и 8. Обратная связь в каждом автогенераторе осуществлена с помощью высокочастотного трансформатора 9, снабженного кол лекторной обмоткой 10, базовой обмот кой 11 и выходной обмоткой 12, Обмот ки 12.образуютвыходные, цепи автот генераторов, в которые включены демодуляторы. Каждый демодулятор выпол нен на транзисторе 13, база которого, подключена к выходной обмотке 12 а в цепь эмиттера включен резистор 14, шунтированный конденсатором 15. В коллекторную цепь транзистора 13 включен резистрр 16, ограничивающий ток. .Демодуляторы соединены с входом распределителя импульров 17, выходы которого подключен к управдяющему входу, инвертора, выполненного на транзисторах 18, соединенных . ПОдвухполупериодной мостовой схеме Казвдый транзистор инвертора шунтирован конденсатором 19. Выходы инвертора соединены с выводами фаз 1 и 2 обмотки статора электродвигателя, причем соединительный провод разной обмотки с инвертором образует виток 20, связывая таким образом вывод другой группы одноименно полюсных секций в каждой фазе с соотгветствующим высокочастотным автогенератором. Регулирование глубины обратной связи, в высокочастотном автогенераторе осуществляется с помощью резисторов 21, включенных в цепи, эмиттеров транзисторов 5 и 6 соответственно.: Как следует из фиг.2, одна группа фаз обмотки статора образована секциями, имеюищми полюсность 5 , а другая - секциями, имеющими полюсность N... . Ротор электродвигателя выполнен с постоянными магнитами 22 и симметрично расположенными чередующимися секторами 23 и 24 различной проводимости , образующими гетерогенную среду, Количество зон одинаковой электропроводности равно числу пар полюсов электродвигателя, а ширинакаждой зоны равна полюсному делению. Оси секторов сдвинуты относительно осей магнитов на электрический угол 45 1 Q , где Q - угол опережения , включения (коммутации фаз), В частности дпя реверсивного двигателя с малым индуктивным сопротивлением обыг но Q 0°, . -Распределитель импульсов 17 пред-, ставляет собой логическую схему дешифровки сигналов, поступающих на его вход с демодуляторов автогене- . раторов, .. . Бескон-тактный электродвигатель постоянного тока работает следующим образом,. . . После включения напряжения питания при произвольном положении ротора, например, указанном на фиг.2, возбуждается один из автогенераторов, а второй автогенератор не возбуявдает- ся. Таким образом, на двух входах распределителя импульсов(дешифратора) 17 появляется комбинация сигналов логические 1 и О. В соответстВИИ с временной диаграммой (фиг.З) распределитель (дешифратор) 17 вырабатывает управляющие сигналы, открывающие соответствующие ключи инверто-. р.а, например, верхний в левой стойке и нижний в средней стойке, такчто напряжение питания прикладывает3 .1
ся к фазной обмотке 1 в той полярности которая обеспечивает поворот ротора в заданном направлении. При повороте ротора под действием
электромагнитного момента изменитсяположение зон его гетерогенной среды относительно секций обмотки. При этом продолжается генерирование напряжения первым автогенератором и возбуждается второй автогенёратор. После демодуляторов на входах деши4гратора появляется новая комбинация сигналов логических 1 и 1, которой соответствует вполне определенная однозначная комбинация управляющих сигналов иа выходе дешифратора. Управляницие сигналы производят коммутацию силовых ключей инвертора так, что создается злектромагнитный момент в прежнем направлении, и ротор поворачивается в ту же сторону. Так как в соответствии с диаграммой работы.(фиг.3) автогенераторов за период Т,т.е. поворот роора: на электрический угол 360®, имется четыре различных комбинации сигналов с двух автогенераторов, то
920564
,на выходах дешифратора может быть получена такая комбинация управляющих инвертором сигналов, при которой форма фазного напряжения имеет 5 вид, данный н диаграмме фиг.З. В
связи с этим при неподвижном роторе всегда имеется однозначная информация о его положении, т.е. совмещенный автогенераторный датчик положа- , 10 ния ротора является позиционным,. что позволяет осуществить-запуск и любо/о. положения ротора всегдА в одну и ту же сторону. .Для изменения направления вращения на лротивоположт tj ное достаточно, поменять местами входы дешифратора.
TJaKHM образом, указанное выполнение фаз обмотки статора злектрог .
20 двигателя и образованная связь с автогенераторами обеспечивает, псшу- чение информщии о направлении, оси намагниченности ротора, что, в свою очередь позволяет осуществить двух5 полупериодную коммутацию инвертора, а следовательно, повысить КПД элек. тродвигателя. .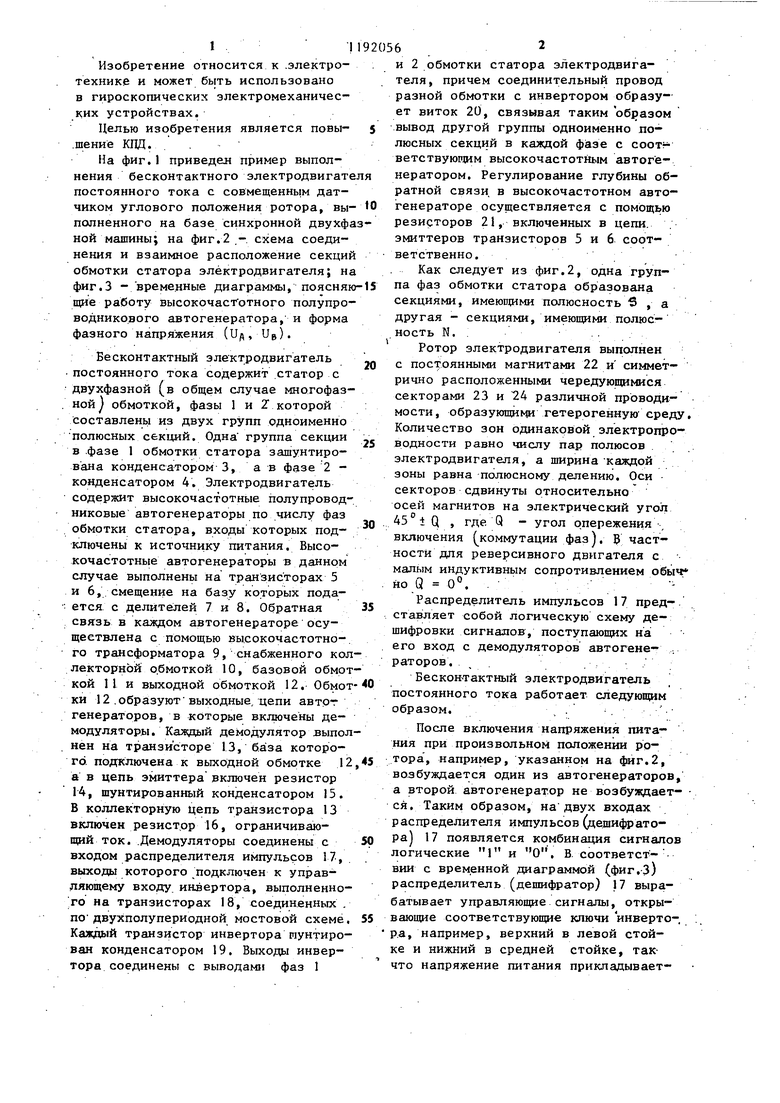
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1992 |
|
RU2026598C1 |
| Бесконтактный электродвигатель постоянного тока | 1976 |
|
SU656160A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Вентильный электропривод | 1985 |
|
SU1292154A1 |
| ЧАСТОТНЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2581629C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2619925C1 |
| Асинхронная вентильная машина | 1982 |
|
SU1046863A1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА с совмещенным датчиком положения ротора, содержащий Статор с многофазной обмоткой, каждая фаза которой составлена из двух групп секций, ротор с постоянными магнитами и чередующимися секторами различной электропроводности, высокочастотные полупроводниковые автогенераторы по числу фаз обмотки статора, входы которых подключены к источнику питания, демодуляторы, включенные соответственно в выходные цепи указанных автогенераторов, распределитель импульсов и инвертор, информационный вход которого подключен к выходам высокочастот-. ных полупроводниковых автогенераторов, выход - к фазам обмотки статора, а управляющий вход инвертора соединен с выходом распределителя импульсов, вход которого связан с демодуляторами, отличающийся тем, что, с целью повышения КПД в него введены конденса 9 торы в количестве, равном числу фаз (Л инвертор выполнен двухполупериодным, а каждая группа секций фазы обмотки статора составлена из одно- именнополюсных секций,причем одна группа секции каждой фазы зашунтирована одним из введенных конденсаторов, а другая группа секций этой , со же фазы выводом, подключенным к h}i- ю вертору, связана с соответствующим о СП высокочастотным полупроводниковым автогенератором. О5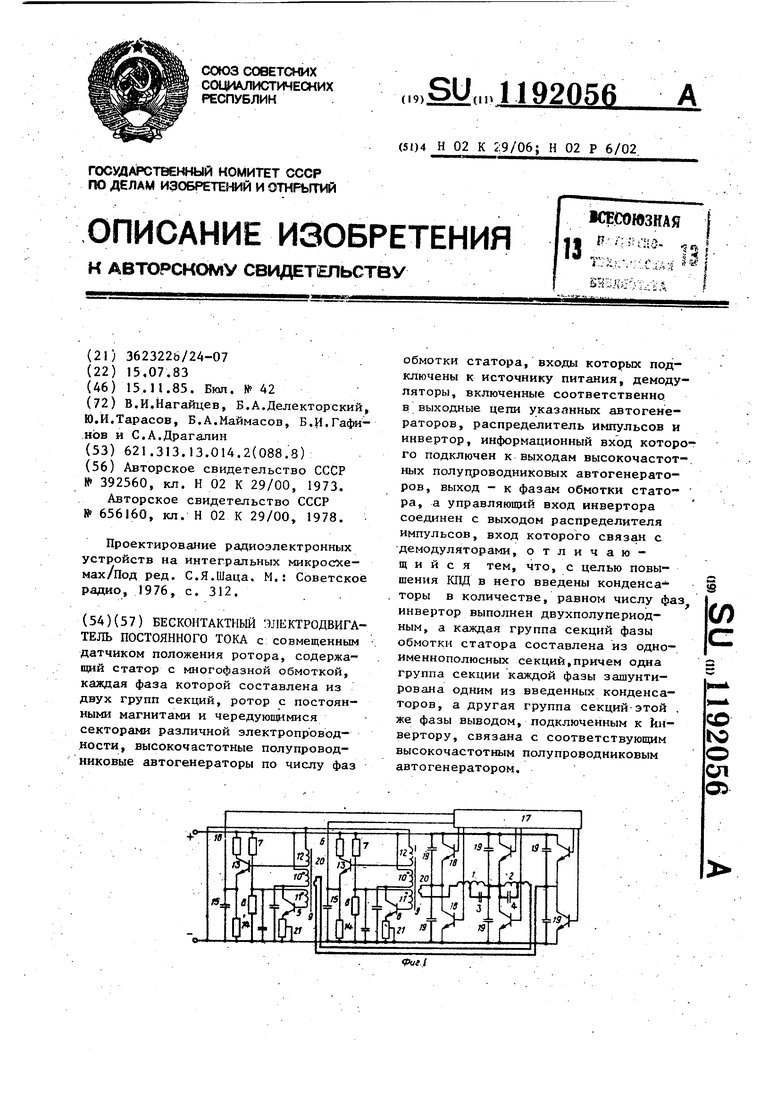
риг. Z
| СПОСОБ ОБРАБОТКИ ПРЕОБРАЗУЮЩИХ ПОРИСТЫХ ПЕРЕГОРОДОК ЭЛЕКТРОКИНЕТИЧЕСКИХ ДАТЧИКОВ | 0 |
|
SU392560A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бесконтактный электродвигатель постоянного тока | 1976 |
|
SU656160A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проектирование радиоэлектронных устройств на интегральных микросхемах/Под ред | |||
| С.Я.Шаца | |||
| М.: Советское радио, 1976, с | |||
| Способ обработки шкур | 1921 |
|
SU312A1 |
