Изобретение относится к горному делу, в частности к учебным тренажерам, и может быть использовано дл имитации процесса развития очистных и подготовительных работ при разработке угольньк пластов.
Цель изобретения - контроль за расчетами по оптимизаш1И параметров ведения горных работ.
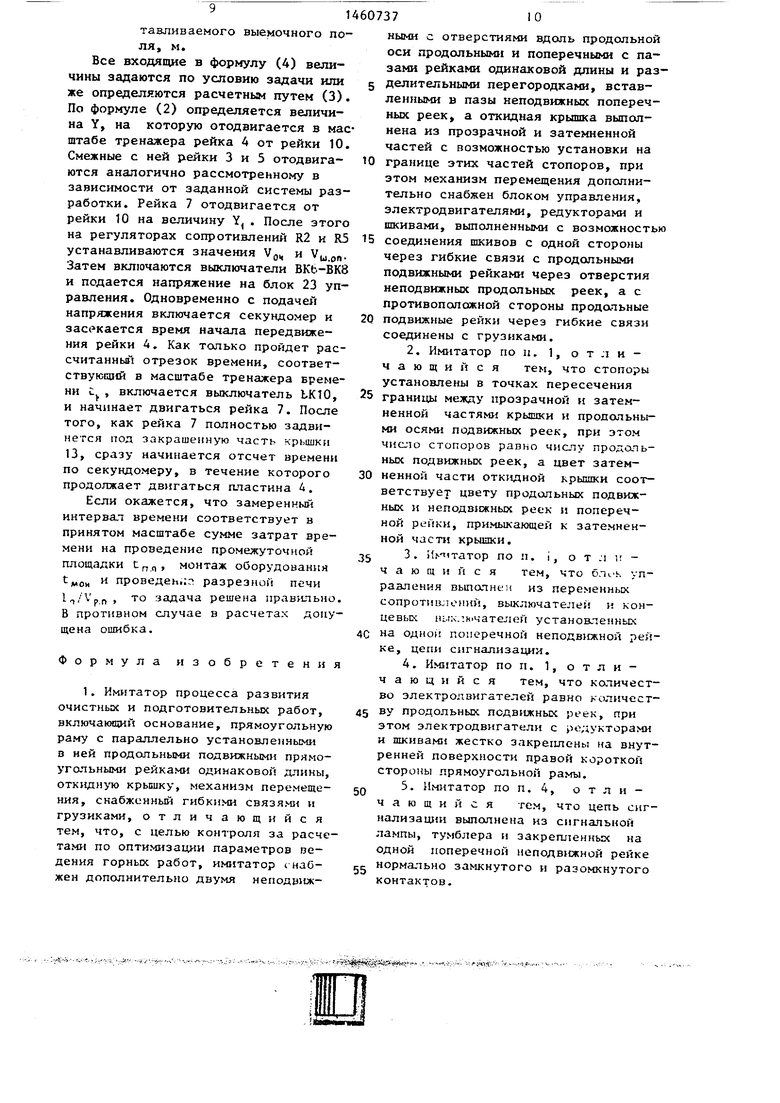
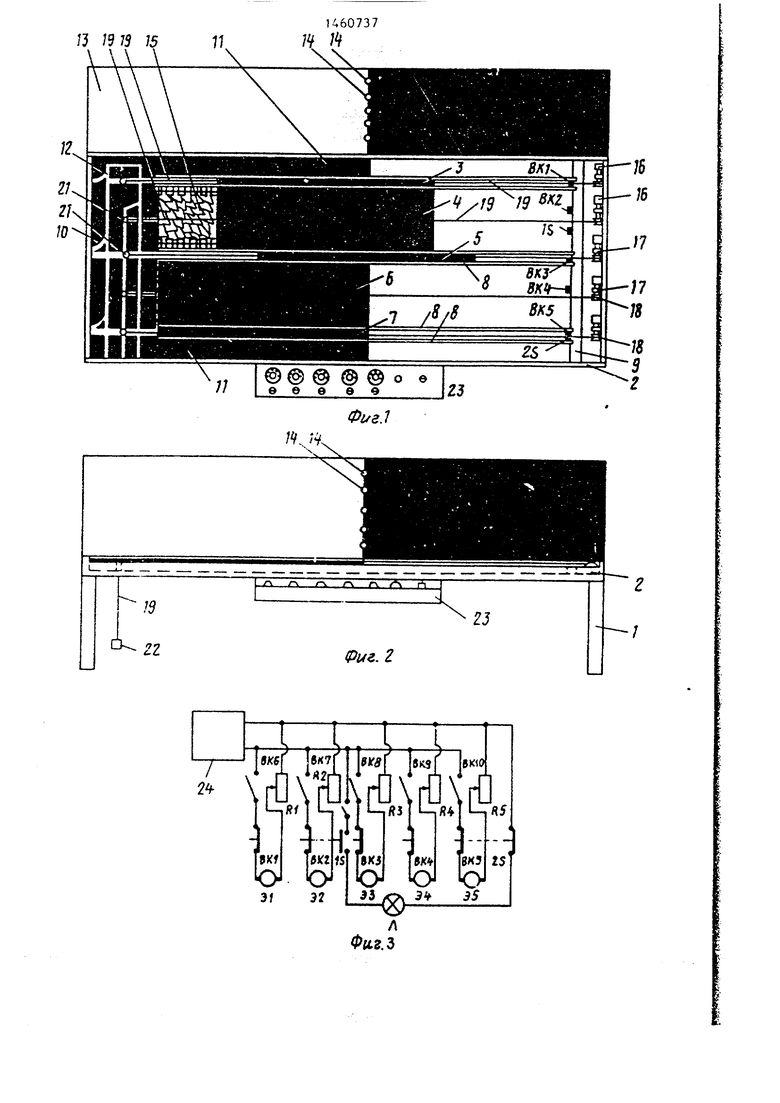
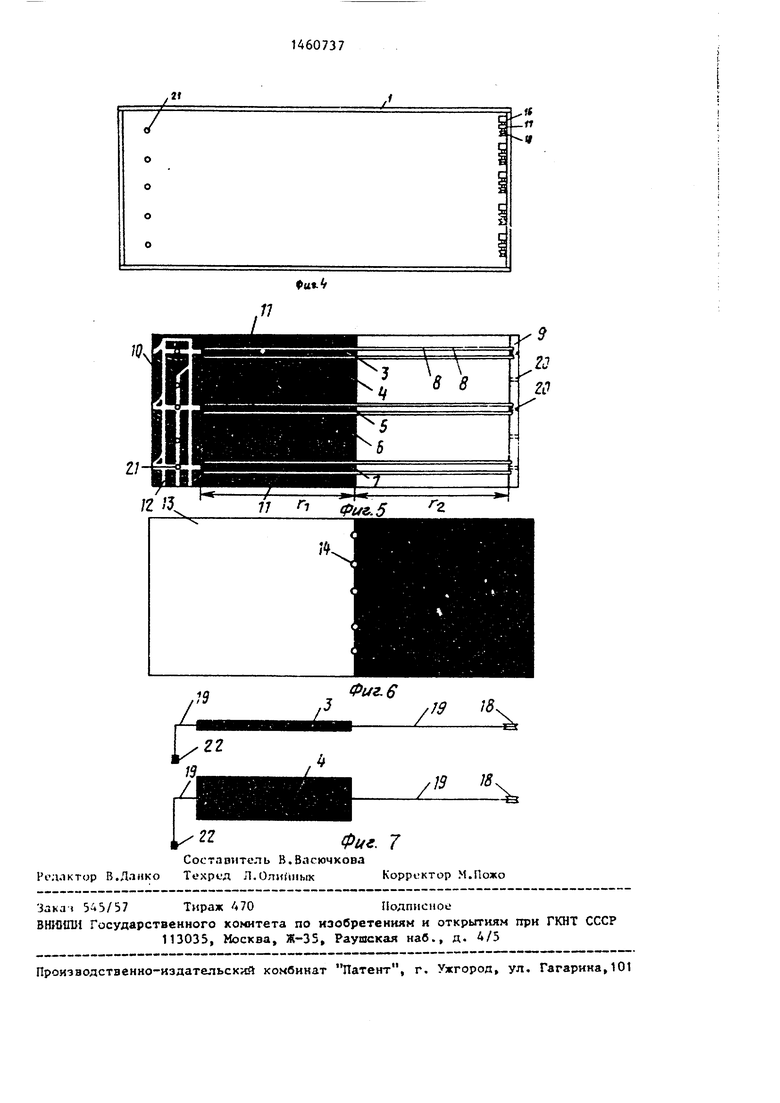
Па фиг.1 изображен имитатор в собранном ыще, вид сверху; на фиг.2 - то же, вид спереди; на фиг.З - принципиальная электрическая схема блока управления электро- двигателей механизма перемещенияJ на фиг.-/ - отдельные элементы татора.
Имитатор состоит из основания 1 выполненного в виде ящика. В основа НИИ 1 кро -ится прямоугольная рама 2 Ширина рамы 2 ранна внутрен.ей ширине осномамия 1, а дли)1а на 1-3 см Меньше ннутрениой длины основания 1 L HHa рамы 2 меньше /итииы основания 1 ii-i-3.i неоохолимости крепления на (нутрени -и ;) стенке t)i.)i},-iHHH
rpo, а . 1 ама 2 BL гаь- ляется в основание 1 сверху. На
раме 2 крепятся нечетные 3, 5, 7 и Четные 4, Ь подвижные продольные рейки, неполвижные продольные перегородки 8, неподвижные поперечные рейь и 9 и 10 и неподвижные продоль- мь е рейк;| П . У боковых границ рамы
21 репятся поперечные рейки 9 и С . ле1)1)й Гп.ткояой границы, наприм1 р, У1:танлв.П1иается Г1оперечная рейка 10 длиной, pauHoi iijiipinie рамы 2, а шириной, paastoji суммарной ширинь- на- или. магистральньк горных вырабс-тох и их охранных элементов
в соответстуYhjiiu-M масштабе.
- та nonept-4 i:iH рейка крепится неподвижно и на верхней ее грани наносится рисунок 12, изображающий нак. юнные или горизонтальные горные
выработки. У правой боковой границы рамы 2 крепится попе- Р1:чная рейка Ч ; тиной, раиной ширине рамы 2, а шириной 1-2 см. Г:ричем ;uuiHa неподн гь-кньгх поперечных реек 9 и 10 один.акова. Оставшаяся рамы 2 бе-з у-.:.;та ширины рейки 1U и 9 де.чнтс) н( IHI ранные части: левую I, и прл) о Ь . У верхней и HIDK- Ней границ НОИ части рамы 2 неподвижно кр .нтся рейки 11, имитирующие цели i угля, длиной равной 1,
JQ
)5
0 5
0
5
0
Верхние грани реек 11 закрашиваются в черный цвет. На оставшейся ширине левой части 1 рамы 2 устанавливаются подвижные продольные нечетные 3, 5, 7 и четные 4, 6 рейки. Нечетные рейки 3, 5, 7 имитируют подготовительные выработки, а четные
4,6 - очистные забои. Длина всех реек 3,5, 7 и 4, 6 равна длине реек 11. Верхняя грань реек 3-7 окрашивается в черны11 цвет, как и реек 11. Ширина четньк реек 4, 6 соответствует в масштабе длине лавы,
а нечетных реек 3, 5, 7 - 1-з{рине подготовительных выработок. Вся левая 1, и правам 1 части рамы 2 разделены перегородками 8 таким образом, чтобы они с тужили нлпра 1:1яю- Щ.ЧМИ для четных 4, Ь и нечетных J,
5.7 pt-L-K. Ллиьп r.:-f. opo. i.jK .- рлв- на улноеняой реек 3-7 Cl,.), увеличенной на глуОичу пазе и io- riepf4Hbtx рейках 10 и 9. Перегородки 8 жестко к|)е;1нтся :;о нсой длине i| t-Ij н пазах ::о;- сречн с-: реек 9 и 10. Нес ,ч.-ору:1ои,1.:;(е ил р.;.м. J крепится Ь лснои части таки.м ) - рази :, чтооы суммарная ш .рина двух ег:1-) реек 1 I, чечеТ И.к ;, 5, 7 и ч. -t, Ь подвижных PL-C-K, а так,-;. всс-:-. г:ерего т;:ок Ь obLTa рав. -а и1ири:-е рлмм 2.
К осчоилиик- 1 крепится крг,:икл 1i, Л 1ин.1 . юяси cTopoiu. ког ч -ои д 1и.-;ы ;н. ск 11 J и j-Uipiine Г,. ;;еиая CTrp,);ia hp:, мм- :; ;:);1-нл ;i;v-ip i4Ht ;i. Ллича .n -л.- 71 ;:;:;iiio 1 , ::лмс i-2 см, ;;р;-- чем ;;.-:яна крь:и:к;; л длине ос- ноьа мия 1. Права;-. ;лсть кры:;:ки 3 закрлшена под цпет роек 3, 7, 11, T.f. у черны; инет. 1;ри закрытой крьпике через .Пигзу:-.; ее прозрлчн,..о часть реикл К) с намесс-нн .гм pncyiiKviM 12, ок; аием1 ые рейки П, 3, 3, 7 и 4, Ь. Правая часть рамь. 2 закрывается закрашенной частью ки 13. При этом на границе лро-.рлч- MoVi и закрашенной частей кр1,г.:ки. 3 и точках пересечения этой границы с npono;ibHbL -o осями поднижньтх реек 3-7 расположены фиксаторы 14.
На верхней гуюскости рамы 2 под каждой четной подвижной pi ;iKoii и Ь рисунок 15, изображающий выработанное пространство и элементы охраны подготовительньсч выработок, а под каждой нечетной рейкой
3, 5 и 7 - рисунок, изображающий крепление подготовительных выработок. При этом когда четные А, 6 и нечетные 3, 5, 7 рейки находятся в правой части, через прозрачную часть крышки 13 видны подготовительные выработки и выработанное пространство, а сами рейки 3-7 закрыты закрашенной частью крышки 13.
Механизм перемещения включает жестко закрепленные внутри основания на его правой короткой стороне электродвигатели 16 постоянного тока (Э1-Э5), соединенные с редукторами 17, на выходные валы которых насажены шкивы 18. К правым торцам подвижных реек 3-7 прикреплены гибхие связи 19, другие концы связей прикреплены к шкиву 18. В поперечной неподвижной рейке 9 в местах, соответствующих продольным осям реек 3-7, проделаны отверстия 20, через которые пропущены гибкие связи 19, соединяющие 18 с подвижными рейками 3-7.
В поперечной неподвижной рейке 1 проделаны отверстия 12, аналогичные и симметричные отверстиям 20, через которые пропущены 19, связывающие левые торцы реек 3-7 с грузиками 22, а в основании 1 - вертикальные отверстия. Гфичем количество грузиков 22, электродвигателей
16, редукторов 17 и шкивов равно ко- . чаются выключатели ВК&-ВК8, а затем
личеству подвижных реек 3-7.
Блок 23 управления включает в себя 6;i(iK 24 питания, вмонтирован- Hbai внутри корпуса блока 23 управления, жестко закрепленные на левой грани правой неподвижной рейки 9 концевые выключатели ВК1-ВК5 и нормально разомкнутые IS и замкнутые 2S контакты, а также жестко закрепленные на верхней панели блока 23 управления выключатели ВК6-ВК12,си1- нальная лаппа Л и переменные сопротивления R1-R5, шкала изменения которых проградуирована в скоростях подвигания очистных и подготовительных забоев в суТки.
Имитатор работает следующим образом.
В исходном положении четные 4,6
подается питание на блок 23 управления. В результате начинают работать электродвигатели 16 (Э1-ЭЗ), которые с одинаковой скоростью
40 вращения наматывают на шкивы 18 гибкие элементы 19, перемещающие с одинаковой скоростью связанные с ними нечетные 3, 5 и четную 4 рейки имит1груя при этом последователь45 ность развития очистных и подготовительных работ при сплошной системе разработки лава-штрек, у которой подготовительные забои не опережают очист}1ые.
При имитации системы разработки лава-этаж (ярус) с опережением откаточного штрека нечетная рейка 5 перемещается в сторону рейки 9 на величину, соответствующую в приня50
При имитации системы разработки лава-этаж (ярус) с опережением откаточного штрека нечетная рейка 5 перемещается в сторону рейки 9 на величину, соответствующую в приняи нечетные 3, 5, 7 продольные подвиж- том масштабе максимально допустимо- 1ые рейки придвинуты к правой грани му опережению забоя откаточного левой неподвижной поперечной рейки 10. Грузики 22, соединенные посредштрека забоя лавы. После этого подготовка тренажера к работе и его включение осуществляется аналогично
ством гибких элементов 19 с подвиж
60737-5
ными пpoдoJ ЬHЫми рейками 3-7, ону- щены на максимальную глубину, а гибкие элементы 19, соединяющие п;. вижные продольные рейки 3-7 со изчи- вами 18, вытянуты на максимальну. дпину и находятся в натянутом паг:о- жении под действием грузиков 22. Крышка 13 опущена на прямоугол -кую
10 раму 2. Блок 23 управления обестиче;;, выключатели ВК6-ВК12 выключены,концевые выключатели ВК1-ВК5 замкнуты, контакт 15 разомкнут, а контакт 2S замкнут.
15 В случае имитации процесса развития очистных и подготовительных работ при сплошной системе разработки по схеме лава-штрек, лава-этаж (ярус) с опережением обкаточного штрека
20 обучаемый рассчитывает скорость под- вигания очистного забоя по известной методике и принимает скорость подвигания подготовительных выработок равной скорости подвигания лавы.
25 Полученные значения скоростей устанавливаются регуляторами на шкалах ггеременных сопротивлений R1-R3 в схемах подключения электродвигателей Э1-ЭЗ. При этом на регуляторах
30 нечетных сопротивлений устанавливаются скорости подвигания подготовительных, а на четных - очистных забоев. После этого при имитации системы разработки лава-штрек . чаются выключатели ВК&-ВК8, а затем
подается питание на блок 23 управления. В результате начинают работать электродвигатели 16 (Э1-ЭЗ), которые с одинаковой скоростью
40 вращения наматывают на шкивы 18 гибкие элементы 19, перемещающие с одинаковой скоростью связанные с ними нечетные 3, 5 и четную 4 рейки имит1груя при этом последователь45 ность развития очистных и подготовительных работ при сплошной систем разработки лава-штрек, у которой подготовительные забои не опережают очист}1ые.
При имитации системы разработки лава-этаж (ярус) с опережением откаточного штрека нечетная рейка 5 перемещается в сторону рейки 9 на величину, соответствующую в приня50
том масштабе максимально допустимо- му опережению забоя откаточного
том масштабе максимально допустимо- му опережению забоя откаточного
штрека забоя лавы. После этого подготовка тренажера к работе и его включение осуществляется аналогично.
Перемещение задействованньос реек 3-5 происходит до тех пор, пока они своими правыми торцами не выключат концевые выключатели ВК1-В13, которые отключат соответствующие электродвигатели Э1-ЭЗ, а сами рейки 3-5 застопорятся фиксаторами 14, расположенными на крыщке 13.
В случае имитации процесса развития очистных и подготовительных работ при столбо::ой системе разработки нечетные рейки 3, 5, 7, имитирующие подготовительные выработки электродвигателями Э1, ЭЗ и 35, которые включаются выключателями ВК6, ВК8 и ВК10, полностью задвигаются под затемненную часть крышки 13. Тем самым имитируется завершение подготовительных работ по оконту- риванию выемочного поля. После этого включаются изложенным способом электродвигатели 32 и 34, которые перемещают подсоединенные к ним посредством гибких элементов 19 шкивов 18 и редукторов 17 четные рейки 4 и 6, Перемещение этих реек имитирует подвигание лавы и отработку оконтуренного выемочного поля, которая завершается после полного задзига- иия под закрашенную часть крьшки 13 и столорения фиксаторами 14 реек 4 и 6.
Контрачь правильности расчетов оптимального соотношения между очи- CTHbLMii и подготовительнымл забояьт осущесткляется тренажером для трех вариантов задач, в соответствии с которыми различается процедура подготовки тренажера к работе.
Первая задача форм1;руется следую- OWM образом: при каком положении очистных забоев в ограбатываемом выемочном поле необходимо начать под1460737
где V
10
15
20
25
скорость подвигания очистного забоя, м/сут время сооружения приемных площадок, сут длина выемочного поля, м; оптимальная скорость проведения штрека, м/сут длина лавы, м; скорость проведения разрезной печи, м/сут/ время монтажа оборудования в лаве, cyTj резерв времени для компен- caiSfni непредвиденных задержек при подготовке соседнего выемочного поля (30-60 сут).
Все входящие в формулу (1) величины либо рассчитываются по методикам, - .ибо задаются по условиям задачи.
Зная величину X, определяют часть длины выемочного поля, пройденную очистным забоем
04
L.P - ы.оп
1, рп WOH
-ре5
Y L -X,
чО
(2)
Величина Y характеризует оптимальное положение лавы в отрабатыва емом выемочном поле. Значение Y пе- реводится в масштаб тренажера и четная рейка 4 отодвигается от рейки 10 ня величину Y в принятом масштабе. Затем на регуляторе переменного со35 протявлеяия R5 цепи подсоединения электродвигателя 33 нечетной рейх:- 7 устанавливается скорректированное значение
40
Vuoo V, L,/X, м/сут
(3)
Такая корректировка позволяет учитывать время на соор -жение приемных площадок, проведение разрезной печи, монтаж оборудования и регде V
скорость подвигания очистного забоя, м/сут время сооружения приемных площадок, сут длина выемочного поля, м; оптимальная скорость проведения штрека, м/сут длина лавы, м; скорость проведения разрезной печи, м/сут/ время монтажа оборудования в лаве, cyTj резерв времени для компен caiSfni непредвиденных задержек при подготовке соседнего выемочного поля (30-60 сут).
Все входящие в формулу (1) величины либо рассчитываются по методикам, - .ибо задаются по условиям задачи.
Зная величину X, определяют част длины выемочного поля, пройденную очистным забоем
04
L.P - ы.оп
1, рп WOH
-ре5
Y L -X,
чО
(2)
Vuoo V, L,/X, м/сут
(3)
Такая корректировка позволяет учитывать время на соор -жение приемных площадок, проведение разрезной печи, монтаж оборудования и ре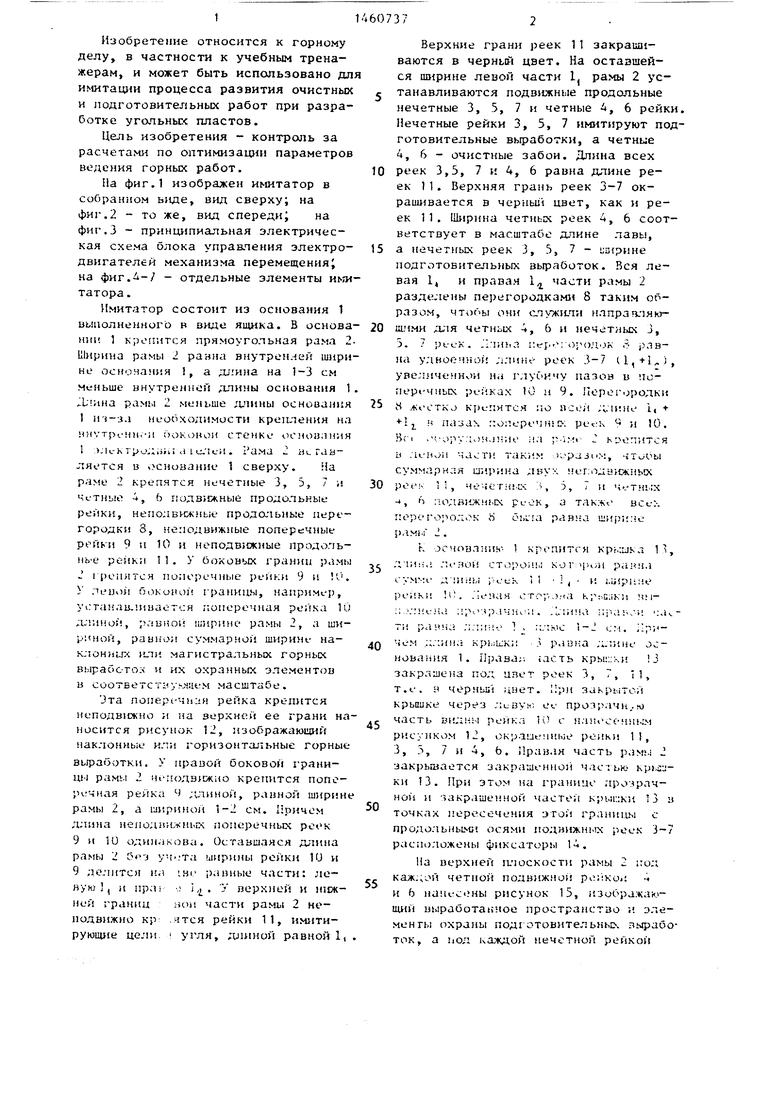



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разработки пологих и наклонных пластов полезных ископаемых | 1991 |
|
SU1810542A1 |
| Способ снижения эндогенной пожароопасности выработанного пространства | 1991 |
|
SU1809110A1 |
| СПОСОБ ПОДЭТАЖНОЙ РАЗРАБОТКИ КРУТЫХ ПЛАСТОВ С ЗАКЛАДКОЙ ВЫРАБОТАННОГО ПРОСТРАНСТВА | 2011 |
|
RU2467169C1 |
| Способ разработки угольных пластов и выемочный агрегат для его осуществления | 1988 |
|
SU1700238A1 |
| Способ разработки пологих пластов полезных ископаемых | 1991 |
|
SU1789020A3 |
| ТЕХНОЛОГИЧЕСКАЯ СХЕМА ВЫЕМОЧНОГО УЧАСТКА ПОДЗЕМНОЙ БЕЗОПАСНОЙ РАЗРАБОТКИ ВЫСОКОГАЗОНОСНОГО ПЛАСТА | 2018 |
|
RU2735072C2 |
| Способ разработки пологого пласта в неустойчивых породах | 1988 |
|
SU1571248A1 |
| Способ слоевой разработки мощных пологих угольных пластов | 1986 |
|
SU1411472A1 |
| СПОСОБ ИНТЕНСИВНОЙ ОТРАБОТКИ ПОЛОГИХ УГОЛЬНЫХ ПЛАСТОВ МЕХАНИЗИРОВАННЫМИ КОМПЛЕКСАМИ БЕЗ ПРЕДВАРИТЕЛЬНОЙ ПРОХОДКИ ПОДГОТОВИТЕЛЬНЫХ ВЫРАБОТОК | 2010 |
|
RU2444624C1 |
| СПОСОБ ПОДЭТАЖНОЙ РАЗРАБОТКИ КРУТЫХ ПЛАСТОВ С ЗАКЛАДКОЙ ВЫРАБОТАННОГО ПРОСТРАНСТВА | 2017 |
|
RU2644185C1 |
готовку нового выемочного поля с тем, 45 зерв для компенсации непредвиденных
чтооы к моменту завершения очистных работ оно было своевременно подготовлено к работе при оптима тьных скоростях проведения выработок.
В этом случае по известной методике рассчитывается величина X, определяющая оптимальную длину выемочного поля, еще не отработанную лавой, при котором необходимо начинать подготавливать соседнее выемочное поле
X . „.(. +
Р ) . М.
(1)
задержек при подготовке соседнего выемочного паля.
Дальнейшая подготовка тренажера к работе зависит от заданной по
50 условию з адачи системы разработки. При сплошной системе разработки лава-штрек четная рейка 4 и смежные с ней нечетные рейки 3 и 5 отодвигаются от рейки 10 на одну и ту же
55 величину Y.
При сплошной системе разработки лава-этаж (ярус) четная рейки 4 и нечетная 3 рейки отодвигаются на величину Y от рейки 10, а нечетная
рейка 5 - на величину Y плюс минимально допустимое опережение забоя откаточного штрека забоя лавы.
При столбовой системе разработки рейки 3 и 5 полностью задвигаются под затемненную часть крьшжи 13, а четная рейка 4 отодвигается от рейки 10 на величину Y.
После установки реек 3-5 в требуемые в зависимости от системы разработки и вьшолненных расчетов величины Y положения на соответствующих этим рейкам регуляторах переменных сопротивлений R1-R3 устанавливаются заданные по условию задачи или рассчитанные значения скоростей подвигания лавы и смежных с ней подготовительных выработок (при сплошных системах разработки) 1ШИ только лаьы (при столбовой системе разработки). Далее включаются выключатели ВК6-ВК8, ВКЮ и ВК12, после чего подается напряжение на блок управления.
Задействованные выключателями ВК6-ВКЗ и ВКЮ :м;ектродБИгатели 31- J3 и 33 начинают посредством редукторов 17, шкивов 18 и гибких элементов 19 перемещать с заданными скоростями соответствующие рейки 3-5 и 7.
Если расчеты оптимального соот- нопення вьшо.-1иены верно, то четная 4 и нечетная 7 рейки задвигаются под затемненную часть крьшжи 13 одновременно. При этом четная рейка ч своим правьа торцом замыкает нормально разомкнутый контакт IS цепи сигнализации и выключает кон- иевой вьжлючатель ВК2. При этом происходит отключение электродвигателя Э2 и стопорение рейки 4 соответствующим фиксатором 14 на крьшке 13, а также замыкание цепи сигнализации. Одновременно рейка 7 своим правым торцом размыкает нормально замкну- тьш контакт 2S и выключает концевой выключатель ВК5, В результате чего происходит отключение электродвигателя 35 с одновременным стопо- рением рейки 7 и размыканием цепи сигнализащги, что исключает загорание сигнальной лампы Л и подтверждает правильность выполненных расчетов,
Если же рейка 7 отстанет от рейки 4, то размыкание нормально замкнутого контакта 2S не произойдет и загорится сигнальная лампа Л, ука146073/о
зывая на допущенную в расчетах ошибку, которая привела к несвоевременной подготовке соседнего выемочного с поля.
Если рейка 7 опередит четную рейку 4, то разомкнется контакт 2S и загорание лампы Л не произойдет, однако в этом случае по секу1щоме10 РУ определяется разность времени
между полной задвижкой под закрашенную часть крышки 13 нечетной 7 и четной 4 реек. Переаод установленного времени с масштаба модели в масштаб
15 натуры показывает величину времени преждевременной подготовки нового выемочного поля. Следовательно, и в этом случае в расчетах допущена ошибка.
20 Вторая задача формулируется следующим образом: с какой минимально допустимой скоростью Vjj необходимо проводить подготовительные выработки, чтобы при определенном положе25 ник очистного забоя в отрабатываемом выемочном поле обеспечить своевременный ввод кового выемочного поля в работу.
В этом случае величина V опреде30 ляется по формуле (3) и устанавливается на регуляторе переменного сопротивления R5, а на регуляторе сопротивления R2 устанавливается величина VQ . Величина X задается по усоц ловию з.1дачи. Далее по формуле (2) определяется Y и рейка 4 отодвигается от рейки 0 на величину Y. Рейки 3 и 5 отодвигаются от ре.й1-:и 10 как и в предьиувдгх случаях в зависи40 мости от заданной системы разработки. Затем включаются выключатели ВК6-ВК8, ВКЮ и ВК12 и подается напряжение на блок 23 управления. Работа тренажера и контроль правиль45 ности расчетов осуществляются аналогично.
Третья задача расчета соотношения положен1О1 очистных и подготовительных забоев формулируется следую50 щим образом: определить имеющийся фактически резерв времени на окончание подготовки нового выемочного поля при существующем положении очистных и подготовительных забоев.
55 tf-X/V -(Ькр-,)/У, -lp/Vp.n , сут(4)
где Y, - величина, на которую пройден откаточный штрек подготавливаемого выемочного поля , м.
Все входящие в формулу (4) величины задаются по условию задачи или же определяются расчетньм путем (3). По формуле (2) определяется величина Y, на которую отодвигается в масштабе тренажера рейка 4 от рейки 10. Смежные с ней рейки 3 и 5 отодвигаются аналогично рассмотренному в зависимости от заданной системы разработки. Рейка 7 отодвигается от рейки 10 на величину Y,. После этого на регуляторах сопротивлений R2 и R5 устанавливаются значения и . Затем включаются выключатели ВКЬ-ВК8 и подается напряжение на блок 23 управления. Одновременно с подачей напряжения включается секундомер и засекается время начала передвижения рейки 4. Как только пройдет рассчитанный отрезок времени, соответствующий в масштабе тренажера времени с , включается выключатель ЬКЮ, и начинает двигаться рейка 7. После того, как рейка 7 полностью задвинется под закрашенную часть крышки 13, сразу начинается отсчет времени по секундомеру, в течение которого продолжает двигаться пластина 4. Если окажется, что замеренный интервал времени соответствует в принятом масштабе сумме затрат времени на проведение промежуточной площадки tp, монтаж оборудования мои проведен.;. разрезной печи ° задача решена правильно.
В противном случае в расчетах щена ошибка.
донуФормула
зобретения
ными с отверстиями вдоль продольной оси продольными и поперечными с пазами рейками одинаковой длины и раз- 5 делительными перегородками, вставленными в пазы неподвижных поперечных реек а откидная крышка выполнена из прозрачной и затемненной частей с возможностью установки на границе этих частей стопоров, при этом механизм перемещения дополнительно снабжен блоком управления, электродвигателями, редукторами и шкивами, выполненными с возможностью соединения шкивов с одной стороны через гибкие связи с продольными подвижными рейками через отверстия неподвижных продольных реек, а с
10
15
20
противоположной стороны продапьные
30
35
подвижные рейки через гибкие связи соединены с грузиками.
25 границы между прозрачной и затемненной частями крышки и продольными осями подвижных реек, при этом число стопоров равно числу продольных подвижных реек, а цвет затемненной части откидной крышки соответствует цвету продольных подвижных и неподвижных реек и поперечной рейки, примыкающей к затемненной части крышки.
на одной поперечной неподвижной рейке, цепи сигнализации.
5 нормально замкнутого и разомкнутого контактов.
С
5
0
7975 75
П
1460737 /V /
Фиг.1
о о о о
/
75
Фиг, 6
It
«
// .
/
