1
Изобретение относится к автоматизации угледобывающих агрегатов,KONm- лексов, механизированных крепей, а также других машин и механизмов с использованием гидроцилиндров.
Известен гидроцилиндр, содержащий корпус, поршень с полым штоком и датчик положения поршня, вьтолнен- ный в виде постоянного магнита,размещенного в проточке поршня, и изоляционной пластины с установленными на ней магнитоуправляемыми контакта- ми по числу позиций контроля. Пластина размещена в трубчатом водонепроницаемом кожухе, расположенном в полом штоке.
Недостатком известного гидроцилиндра является отсутствие возможности точной настройки момента переключения и зон переключения магнитоуп- райляемых контактов, что связано с изменяющейся во времени характеристикой магнита, его изоляцией от окру- .жающих ферромагнитных масс гидроцилиндра, от точности монтажа и т.д. Кроме того, контроль позиций при ходе Вперед, Назад осуществляется одним и тем же контактом, что из-за несовпадения моментов включения и отключения также уменьшает точность контроля о
СО
оз
Целью изобретения является повышение точности контроля каждой позиции при прямом и обратном ходе и регулирование зоны-включения.
Указанная цель достигается тем, что датчик положения поршня снабжен дополнительной изоляционной пластиной с вспомогательными магнитоуправ- ляемьми контактами, причем каждый нитоуправляе1 аш контакт дополнительной пластины смещен относительно соответствующего контакта основной пластины по оси гидроцилиндра и включен последовательно последнему, а каждый контакт основной пластины подключен К отдельному выводу. Основная и вспомогательная пластины установлены с возможностью относительного продоль- ного перемещения.
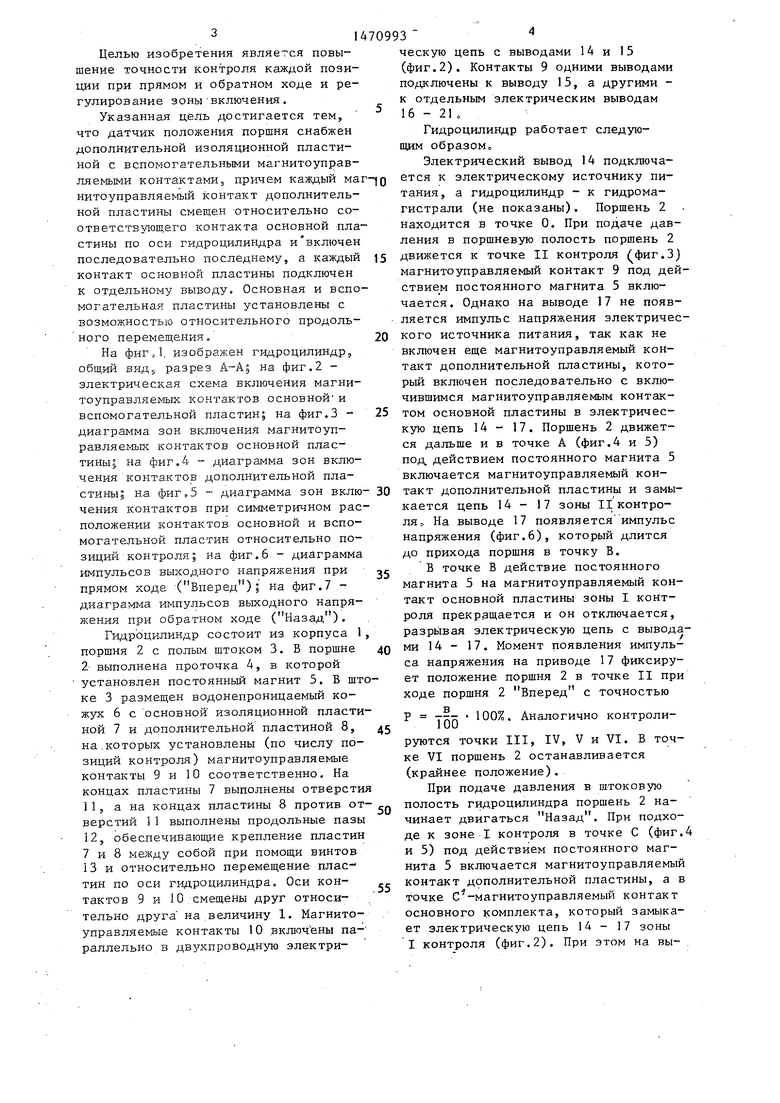
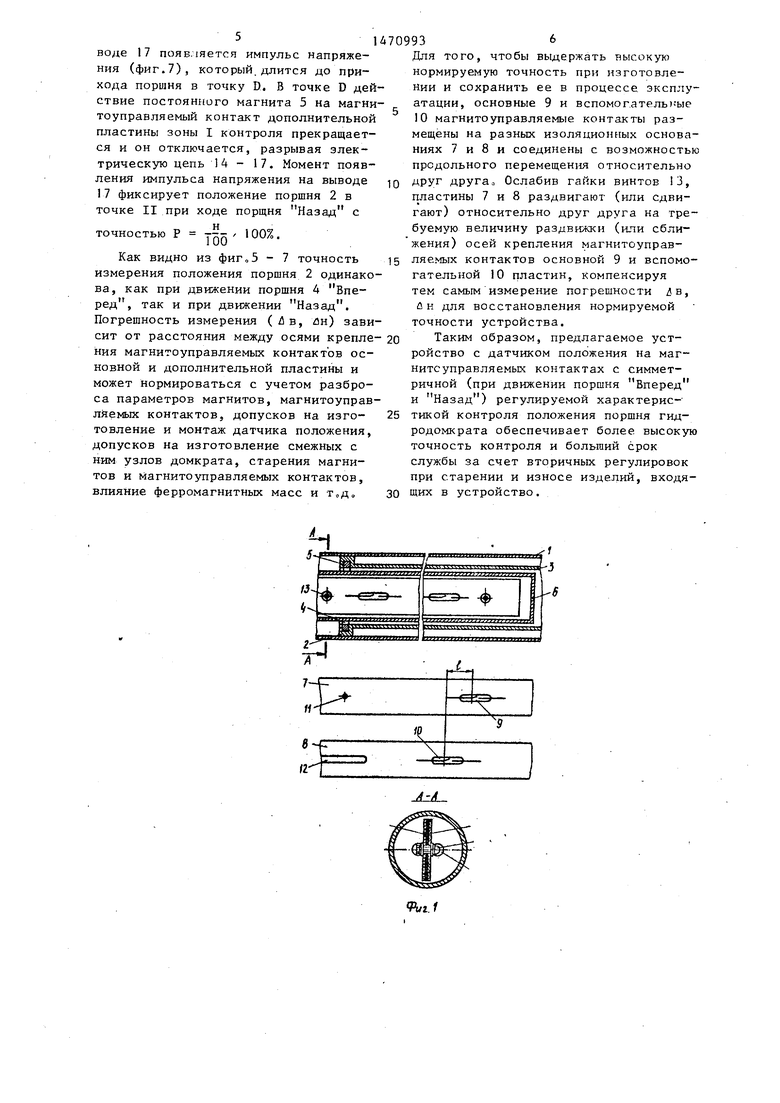
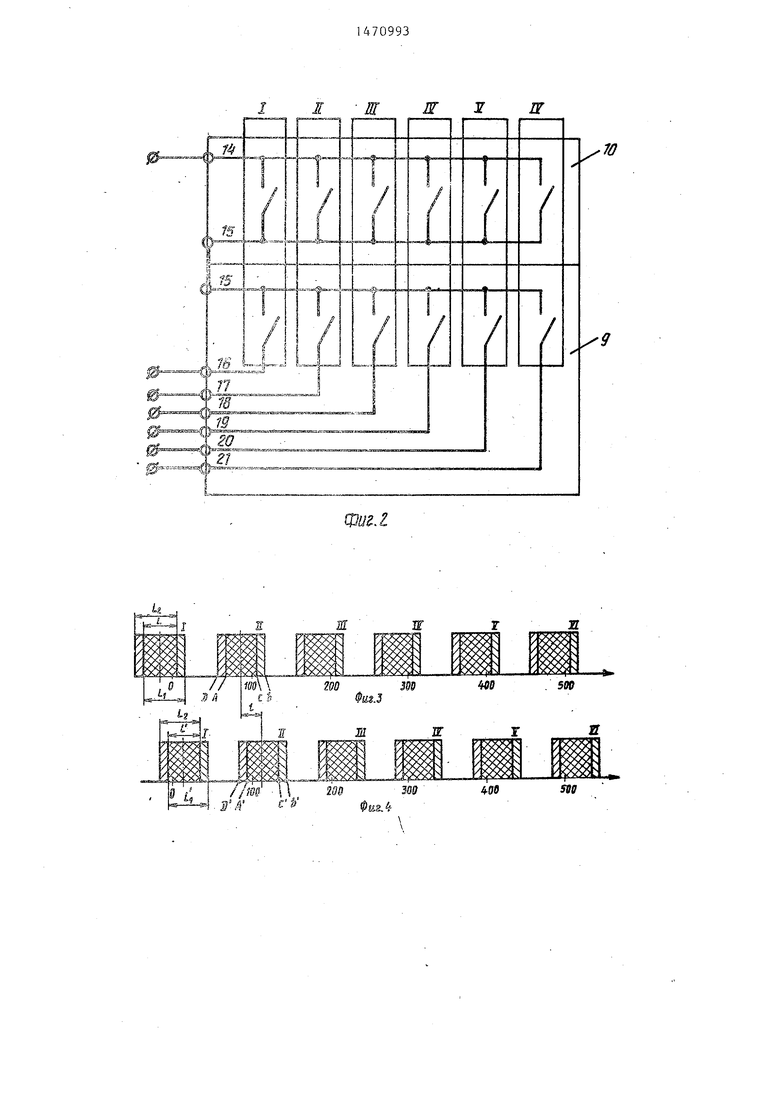
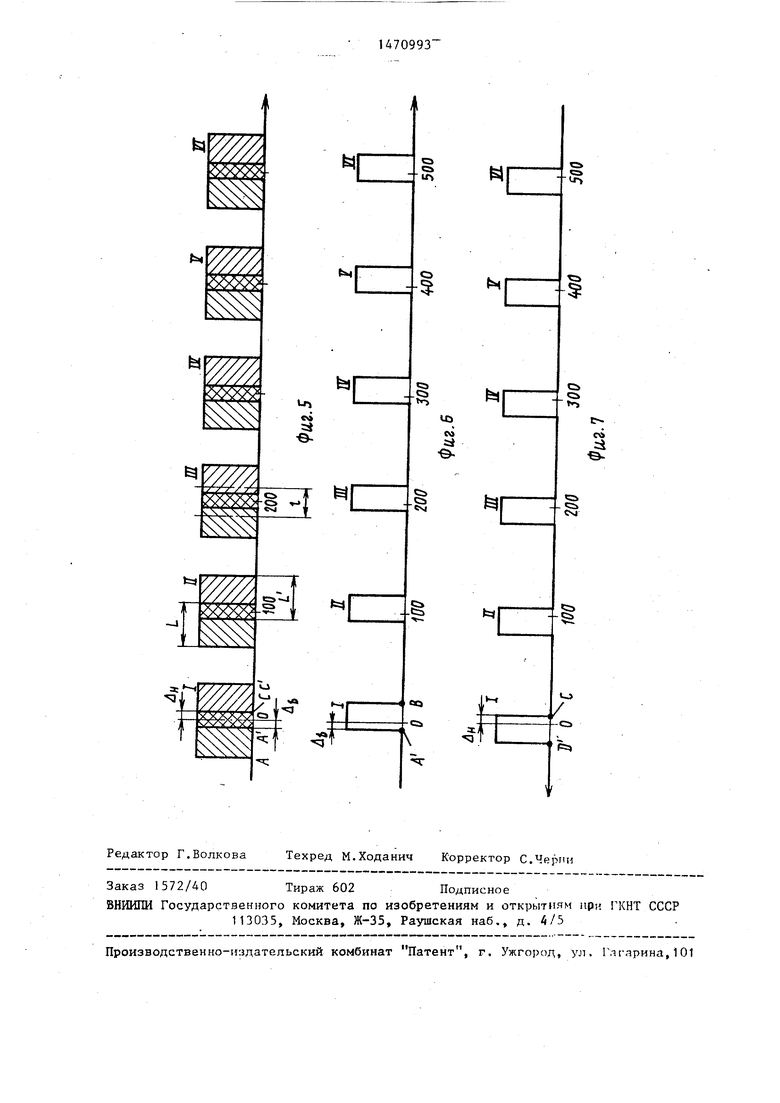
На фиг,1, изображен гидроцилиндр, общий видэ разрез А-А на фиг.2 - электрическая схема включения магни- тоуправляемых контактов основной и вспомогательной пластинj на фиг.З - диаграмма зон включения магнитоуп- равляемых контактов основной пластины; на фиг.4 - диаграмма зон включения контактов дополнительной плаческую цепь с выводами 14 и 15 (фиг.2). Контакты 9 одними выводами подключены к выводу 15, а другими - к отдельным электрическим выводам 16 - 2 К
Гидроцилиндр работает следующим образом
Электрический вывод 14 подключается к электрическому источнику питания , а гидроцилиндр - к гидромагистрали (не показаны). Поршень 2 находится в точке 0. При подаче давления в поршневую полость поршень 2 5 движется к точке II контроля (фиг.З) магнитоуправляемый контакт 9 под действием постоянного магнита 5 включается. Однако на выводе 17 не появляется импульс напряжения электрического источника питания, так как не включен еще магнитоуправляемый контакт дополнительной пластины, кото- рьй включен последовательно с включившимся магнитоуправляемым KOHTEIK- том основной пластины в электричес- кую цепь 14 - 17. Поршень 2 движется дальше и в точке А (фиг.4 и 5) под, действием постоянного магнита 5 включается магнитоуправляемый кон20
25
стины; на фиг.З - диаграмма зон вклю- 30 такт дополнительной пластины и замыкается цепь 14 - 17 зоны II контроля.. На выводе 17 появляется импульс напряжения (фиг.6), который длится до прихода поршня в точку В.
чения контактов при симметричном расположении контактов основной и вспомогательной пластин относительно позиций контроля; на фиг.6 - диаграмма импульсов выходного напряжения при прямом ходе (Вперед); на фиг.7 - диаграмма импульсов выходного напряжения при обратном ходе (Назад).
Гидроцилиндр состоит из корпуса 1, поршня 2 с полым штоком 3. В поршне 2 выполнена проточка 4, в которой установлен постоянный магнит 5. Б штоке 3 размещен водонепроницаемый кожух 6 с основной изоляционной пластиной 7 и дополнительной пластиной 8, на,которых установлены (по числу позиций контроля) магнитоуправляемые контакты 9 и 10 соответственно. На концах пластины 7 выполнены отверстия 1 15 а на концах пластины 8 против от- верстий 11 выполнены продольные пазы 12 обеспечивающие крепление пластин 7 и В между собой при помощи винтов 13 и относительно перемещение плас тин по оси гидроцилиндра. Оси контактов 9 и 10 смещены друг относительно друга на,величину 1. Магнитоуправляемые контакты 10 включены па- раллельно в двухпроводную электри
д
ческую цепь с выводами 14 и 15 (фиг.2). Контакты 9 одними выводами подключены к выводу 15, а другими - к отдельным электрическим выводам 16 - 2 К
Гидроцилиндр работает следующим образом
Электрический вывод 14 подключается к электрическому источнику питания , а гидроцилиндр - к гидромагистрали (не показаны). Поршень 2 находится в точке 0. При подаче давления в поршневую полость поршень 2 5 движется к точке II контроля (фиг.З) магнитоуправляемый контакт 9 под действием постоянного магнита 5 включается. Однако на выводе 17 не появляется импульс напряжения электрического источника питания, так как не включен еще магнитоуправляемый контакт дополнительной пластины, кото- рьй включен последовательно с включившимся магнитоуправляемым KOHTEIK- том основной пластины в электричес- кую цепь 14 - 17. Поршень 2 движется дальше и в точке А (фиг.4 и 5) под, действием постоянного магнита 5 включается магнитоуправляемый кон0
5
0 такт дополнительной пластины и замы5
0
5
55
кается цепь 14 - 17 зоны II контроля.. На выводе 17 появляется импульс напряжения (фиг.6), который длится до прихода поршня в точку В.
В точке В действие постоянного магнита 5 на магнитоуправляемый контакт основной пластины зоны I контроля прекращается и он отключается, разрывая электрическую цепь с выводами 14 - 17. Момент появления импульса напряжения на приводе 17 фиксирует положение поршня 2 в точке II при ходе поршня 2 Вперед с точностью
Р -2- . 100%. Аналогично контролируются точки III, IV, V и VI. В точке VI поршень 2 останавливается (крайнее положение).
При подаче давления в штоковую полость гидроцилиндра поршень 2 начинает двигаться Назад. При подходе к зоне I контроля в точке С (фиг.4 и 5) под действием постоянного магнита 5 включается магнитоуправляемый контакт дополнительной пластины, а в точке С -магнитоуправляемый контакт основного комплекта, который замыкает электрическую цепь 14 - 17 зоны I контроля (фиг.2). При этом на выводе 17 появляется импульс напряжения (фиг.7), который, длится до прихода поршня в точку D. В точке D действие постоянного магнита 5 на магни- тоуправляемый контакт дополнительной пластины зоны I контроля прекращается и он отключается, разрывая электрическую цепь 14 - 17. Момент появления импульса напряжения на выводе 17 фиксирует положение поршня 2 в точке II при ходе порщня Назад с
точностью
р 5
100
100%.
Как видно из - 7 точность
измерения положения поршня 2 одинакова, как при движении поршня 4 Вперед, так и при движении Назад. Погрешность измерения (Л в, Дн) зависит от расстояния между осями крепле- ния магнитоуправляемьк контактов основной и дополнительной пластины и может нормироваться с учетом разброса параметров магнитов, магнитоуправ- ляемых контактов, допусков на изго- товление и монтаж датчика положения, допусков на изготовление смежных с ним узлов домкрата, старения магнитов и магнитоуправляемых контактов, влияние ферромагнитных масс и т„Да
U70993
0
5
0 5 О
Для того, чтобы выдержать высокую нормируемую точность при изготовлении и сохранить ее в процессе эксплуатации, основные 9 и вспомогатель);ые 10 магнитоуправляемые контакты размещены на разных изоляционных основаниях 7 и 8 и соединены с возможностью продольного перемещения относительно друг друга с, Ослабив гайки винтов 3, п ластины 7 и 8 раздвигают (или сдвигают) относительно друг друга на требуемую величину раздвижки (или сближения) осей крепления магнитоуправляемых контактов основной 9 и вспомогательной 10 пластин, компенсируя тем самым измерение погрешности ZB, U н для восстановления нормируемой точности устройства.
Таким образом, предлагаемое устройство с датчиком положения на магните управляемых контактах с симметричной (при движении поршня Вперед и Назад) регулируемой характерис-- тикой контроля положения поршня гидродомкрата обеспечивает более высокую точность контроля и больший срок службы за счет вторичных регулировок при старении и износе изделий, входящих в устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ВСПЫШКИ И ТАНГЕНСА УГЛА ДИЭЛЕКТРИЧЕСКИХ ПОТЕРЬ ГОРЮЧИХ ЖИДКОСТЕЙ | 2000 |
|
RU2176786C2 |
| Датчик положения | 1981 |
|
SU1001140A1 |
| Уровнемер | 1976 |
|
SU662812A1 |
| Устройство для контроля заданного уровня погружения сваи | 1981 |
|
SU1059065A2 |
| Устройство для контроля наличия магнетитовой руды на ленте конвейера | 1982 |
|
SU1016246A1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ | 2011 |
|
RU2501648C2 |
| Способ регистрации времени срабатывания спринклерного оросителя (варианты) и устройство для его реализации | 2017 |
|
RU2661858C1 |
| Устройство для входного контроляРАбОТОСпОСОбНОСТи МАгНиТОупРАВляЕ-МыХ KOHTAKTOB | 1979 |
|
SU796793A1 |
| Разрядник | 1989 |
|
SU1728909A1 |
| Термомагнитное реле | 1990 |
|
SU1709412A1 |
Изобретение относится к автоматизации угледобывающих агрегатов, комплексов, механизированных крепей, а также других машин и механизмов с использованием гидроцилиндров. Цель - повышение точности контроля каждой позиции при прямом и обратном ходе. Сущность: датчик положения поршня снабжен дополнительной изоляционной пластиной с вспомогательными магнитоуправляемыми контактами, причем каждый магнитоуправляемый контакт дополнительной пластины смещен относительно соответствующего контакта основной пластины по оси гидроцилиндра и включен последовательно последнему, а каждый контакт основной пластины подключен к отдельному выводу. Изоляционные пластины установлены с возможностью продольного перемещения. 1 з.п.ф-лы, 1 ил.
Фиг. I
т
т
| Способ изготовления модели для исследования объемного электромагнитного поля | 1984 |
|
SU1226515A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
