и
А
/
}
I
т- /
и1
Изобретение относится к измерительной технике и может быть использовано в океанографии при проведени гидрофизических исследований. Цель изобретения - повышение точности определения фактической инерционности измерителя температуры пр сокращении эксплуатационных затрат.
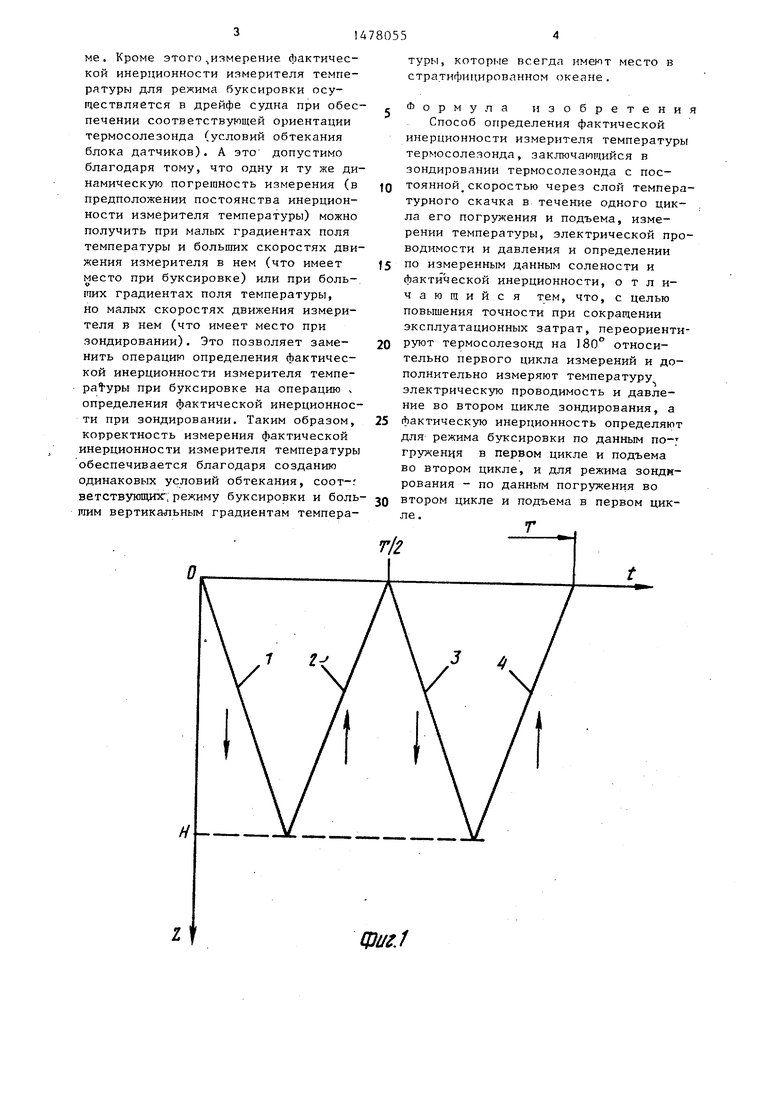
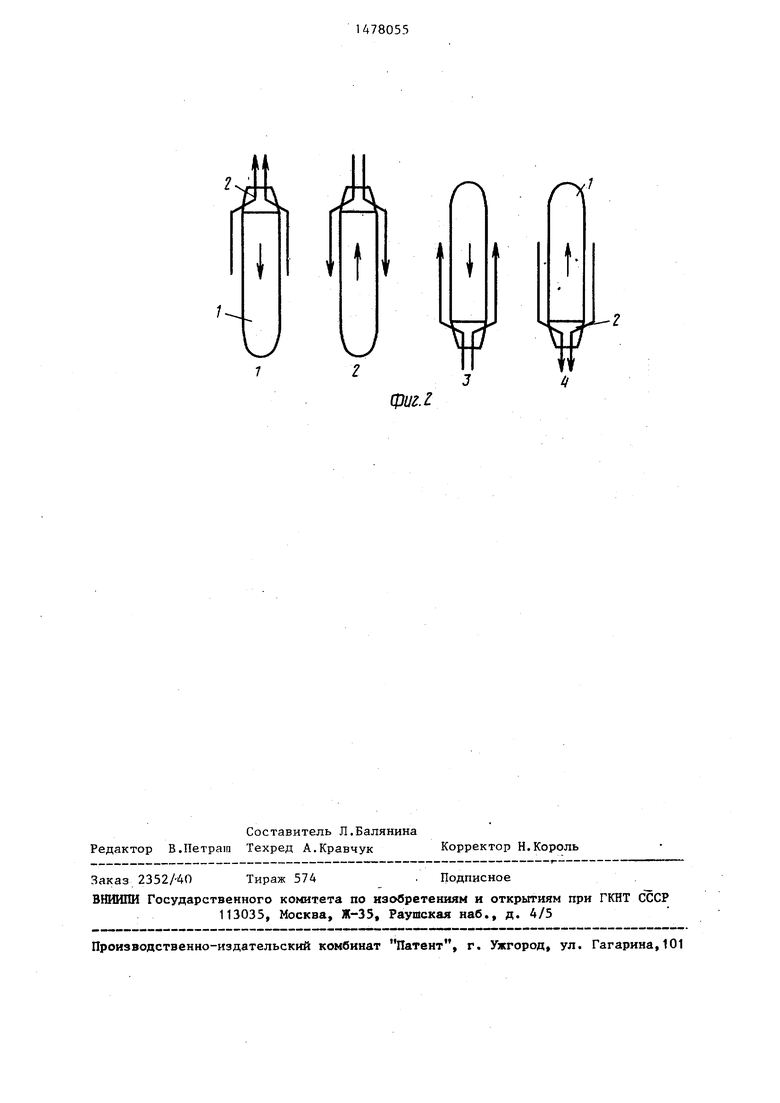
На фиг.1 показан график измене- ния глубины термосолезонда; на фиг.2 - схемы обтекания блока измерительных датчиков; на фиг.З - тер- мосолезонд при переориентации.
Термосолезонд содержит контейнер 1 с измерительной аппаратурой, блок 2 измерительных датчиков, кабель- трос 3, посыльный грузик 4, размыкатель 5, кронштейн 6.
Для измерения фактической инерционности в реальных условиях эксплатации необходимо воздействовать на термосолезонд температурным скачком и обтекающим потоком определенного направления, что может быть осуществлено следующим образом. Термосолезонд в режиме зондирования погр жают и поднимают через слой температурного скачка, а задание направлния обтекающего потока осуществляют путем изменения ориентации термосолезонда на кабель-тросе 3. Для этого с помощью кронштейна 6 (фиг.З зонд крепится к размыкателю 5, установленному на кабель-тросе 3.Затем осуществляют погружение термосолезонда (линия 1, фиг.1), вытравливая кабель-трос 3 с постоянной скоростью. Скорость вытравливания ((погржения) устанавливают такой же, как при проведении зондирований в обычном режиме при работе с термосолезо дом на гидрологических станциях. По достижении глубины Н, которая состаляет 250-300 м (ниже слоя температу ного скачка), погружение прекращают и производят подъем, при этом скорость подъема устанавливают равной скорости погружения.
По окончании подъема (Н 0)
производят переориентацию термосолезонда на 180 . Для этого бросают посыльный грузик 4 (фиг.З), который, достигая размыкателя 5 вызывает его срабатывание. В результате термосоле-55 зонд под действием собственного веса переориентируется на 180 во второе рабочее положение (фиг.З),при котором производят второй цикл погру
0
жения до глубины Н и подъем (), осуществляя его с теми же скоростями, как и первый. В первом и втором цик-i лах измеряют температуру, относитель-, ную электрическую проводимость и давление. Скорость погружения определяют по приращению глубины погружения за единицу -времени. В результате указанных операций получают две пары измеренных параметров, соответствующих различным рабочим режимам эксплуатации (зондирование, буксировка) и одинаковым условиям обтекания. Так 1 и 4 (фиг.2) соответствуют условиям обтекания термосолезонда (контейнер
1с измерительной аппаратурой, блок
2измерительных датчиков) в рабочем режиме буксировки, а 2 и 3 (фиг.2)- в режиме зондирования. По данным Т
и S для каждого режима строят TS-кри вые и определяют фактическую инерци-j онность измерителя температуры по следующим формулам: для режима буксировки,
,4
2K2s
Mv4+ v;
)
0
для режима зондирования 2K1L
K,(V,+ vl
,)
0
где к и К
а
К
коэффициенты, определяемые методом наименьших квадратов по TS-кривым, построенным по данным измерений 1 , 4 и 2,
3 (фиг.I) соответственно;
коэффициент, определяющий ошибку расчета солености в функции температуры (линии 1,3);
скорости погружения и подъема.
Таким образом, согласно предлагаемому способу определение фактической инерционности измерителя температуры осуществляется с соблюдением одинаковых условий обтекания измерителя температуры для разных режимов эксплуатации. Так, для режима зондирования полностью исключена погрешность измерения, связанная с влиянием ма с- сы термосолезонда при измерении распределения температуры при подъеV, и V,
ме, Кроме этого ..измерение фактической инерционности измерителя температуры для режима буксировки осуществляется в дрейфе судна при обес- печении соответствующей ориентации термосолезонда (условий обтекания блока датчиков). А это допустимо благодаря тому, что одну и ту же динамическую погрешность измерения (в предположении постоянства инерционности измерителя температуры) можно получить при малых градиентах поля температуры и больших скоростях движения измерителя в нем (что имеет место при буксировке) или при больших градиентах поля температуры, но малых скоростях движения измерителя в нем (что имеет место при зондировании). Это позволяет заме- нить операцию определения фактической инерционности измерителя температуры при буксировке на операцию определения фактической инерционности при зондировании. Таким образом, корректность измерения фактической инерционности измерителя температуры обеспечивается благодаря созданию одинаковых условий обтекания, соот-г ветствуклцтг, режиму буксировки и боль гаим вертикальным градиентам температуры, которые всегда имеют место в стратифицированном океане.
Формула изобретени
Способ определения фактической инерционности измерителя температуры термосолезонда, заключающийся в зондировании термосолезонда с постоянной скоростью через слой температурного скачка в течение одного цикла его погружения и подъема, измерении температуры, электрической проводимости и давления и определении по измеренным данным солености и фактической инерционности, отличающийся тем, что, с целью повышения точности при сокращении эксплуатационных затрат, переориентируют термосолезонд на 180° относительно первого цикла измерений и дополнительно измеряют температуру электрическую проводимость и давление во втором цикле зондирования, а фактическую инерционность определяют для режима буксировки по данным по-: груженая в первом цикле и подъема во втором цикле, и для режима зондирования - по данным погружения во втором цикле и подъема в первом цикле.
Фиг.1
Фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИМ ЗОНДОМ В СЛОЯХ С БОЛЬШИМИ ГРАДИЕНТАМИ ИЗМЕРЯЕМЫХ ПАРАМЕТРОВ | 2000 |
|
RU2192026C2 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2571292C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| ЦИКЛИЧЕСКАЯ АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406640C1 |
| АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406639C1 |
| ЗАЯКОРЕННАЯ ПРОФИЛИРУЮЩАЯ ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2014 |
|
RU2545159C1 |
| ЗОНДИРУЮЩИЙ КОМПЛЕКС | 2023 |
|
RU2828192C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
Изобретение относится к измерительно технике и может быть использовано в океанографии при проведении гидрофизических исследований. Цель изобретения - повышение точности определения фактической инерционности измерителя температуры термосолезонда. Термосолезонд в режиме зондирования погружают и поднимают через слой температурного скачка, а задание направления обтекающего потока осуществляют изменением ориентации термосолезонда на кабель-тросе 3. С помощью кронштейна 6 зонд крепится к размыкателю 5, установленному на кабель-тросе 3
затем осуществляют погружение термосолезонда, вытравливая кабель-трос 3 с постоянной скоростью, и последующий подъем. По окончании подъема производят переориентацию термосолезонда на 180°. Для этого бросают посыльный грузик 4, который, достигая размыкателя 5, вызывает его срабатывание. Затем производят второй цикл погружения и подъема. Определяют при этом температуру и соленость. По полученным данным строят кривые и определяют фактическую инерционность измерителя температуры по формулам. Формулы приводятся. 3 ил.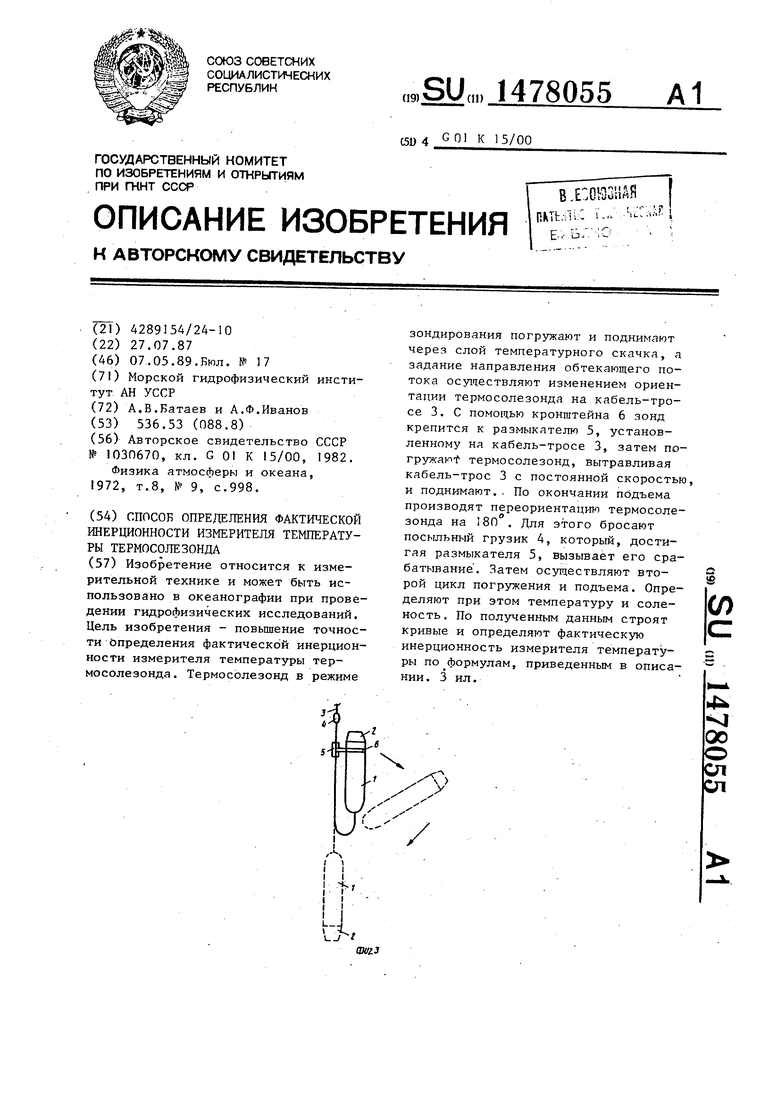
| Способ определения показателя тепловой инерции термопреобразователя | 1982 |
|
SU1030670A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Физика атмосферы и океана, 1972, т.8, № 9, с.998. | |||
