Изобретение относится к области производства подводных работ с использованием буксируемых подводных аппаратов (БПА), преимущественно оснащенных гидроакустической измерительной аппаратурой, и предназначено для обеспечения пространственной ориентации буксируемого подводного аппарата относительно судна буксировщика и исследуемого подводного объекта.
Известное устройство представляет собой буксируемый подводный аппарат [1], выполненный в виде полого цилиндрического тела со съемной головкой и хвостовыми частями и оснащенный носовой и кормовой телекамерами, гидролокатором бокового обзора с дальностью действия 100 м и параметрическим профилографом с цветным индикатором. Размеры БПА составляют: длина 1300 мм, диаметр 210 мм. Ввод сигнальных жил кабель-троса выполнен в головной части, кабельные вводы для приемных и излучающих антенн выполнены рядом с антеннами, все они герметичны и рассчитаны на погружение до глубины 100 м. На боковых частях буксируемого тела выполнены установочные площадки для четырех преобразователей накачки, на специальных бандажах крепятся четыре приемные антенны. Размещение четырех антенн позволяет производить зондирование в горизонтальной и вертикальной плоскостях, а также дает возможность с помощью наклоненной под углом 20 градусов антенны получать панорамное изображение рельефа дна.
Уменьшение рысканий и дифферента решается с помощью хвостового стабилизатора, выполненного в виде широкополосного обода, соединенного с хвостовой частью цилиндрического корпуса пластинчатыми спицами.
Стабилизация по крену (вращательное движение вокруг продольной оси) достигается за счет смещения центра тяжести буксируемого тела.
Необходимое заглубление буксируемого тела при минимальной вытравке кабель-троса осуществляется путем использования заглубительной решетки, что позволяет осуществлять отведение всей буксируемой системы в сторону от судна-носителя.
Ввиду того, что на БПА используют излучатели с узкими характеристиками направленности, то нейтрализация крена и рысканий БПА является определяющим фактором, при выполнении установленных требований, по решению задач обнаружения и контроля заиленного трубопровода, измерения толщины ила над ним, определения структуры донных слоев, оценки характеристик морского донного грунта, проведения различных поисковых работ на подводных морских сооружениях, а также съемки рельефа дна.
БПА, как правило, используются для океанографических исследований в районах с особо сложными физико-географическими условиями (прикромочные районы Арктики, во фронтальных зонах и вокруг айсбергов). Указанные районы отличаются тем, что в них образуются температурно-соленостные неоднородности и вихри различных масштабов, оказывающие значительное влияние на распределение скорости в месте проведения исследований.
При этом измерения должны производиться непрерывно, а при выявлении неоднородностей расстояние между разрезами не должно превышать половины минимального диаметра неоднородностей, а частота измерения на разрезах не должна быть меньше 1/8-1/10 диаметра неоднородности (см., например: А.Т.Щвецов. Использование автономных самоходных и буксируемых измерительных комплексов для исследования неоднородностей океанографических полей // Записки по гидрографии. Л., ГУНиО МО РФ, №253, 2001, с.48).
БПА как техническое средство для проведения гидрологических работ представляет собой динамическую систему, имеющую шесть степеней свободы: три степени свободы по линейным перемещениям, характеризующим траекторию движения БПА по курсу, скорости и глубине погружения, три степени свободы по угловым перемещениям БПА по дифференту, рысканию и крену.
В существующих способах проведения гидрологических работ (съемка рельефа дна, поиск затонувших объектов, мониторинг трубопроводов и т.д.) точность определения параметров посредством установленных на БПА гидроакустических средств в основном оценивается по точности определения места судна-носителя и БПА.
Однако при детальной съемке точность привязки исследуемых подводных элементов к координатам в значительной степени определяется положением на дне пятна, освещаемого гидроакустическим средством. Положение этого пятна, в свою очередь, зависит от ориентации и глубины погружения БПА (см., например: В.Н.Завгородний. О влиянии погрешностей ориентации и глубины погружения буксируемого подводного аппарата на точность съемки рельефа дна // Записки по гидрографии. Л., ГУНиО МО РФ, №253, 2001, с.33).
Качество гидроакустических зондирований подводных объектов в первую очередь зависит от точности стабилизации положения аппарата по глубине, рысканию, дифференту и крену.
Требования к точности стабилизации положения аппарата, как правило, определяются шириной характеристики направленности гидроакустического средства, соответственно в горизонтальной и вертикальной плоскостях.
В известных БПА глубина погружения регулируется длиной кабель-троса, а стабилизация ориентации по дифференту и рысканию определяется обводами корпуса БПА, местом крепления кабель-троса к корпусу аппарата, фиксированным положением рулей. Кроме того, траектория движения БПА по глубине и ориентация по рысканию и дифференту зависят от скорости буксировки, подводных течений и воздействия волнения моря на судно-носитель.
Как показывает выполненный анализ погрешностей съемки дна с использованием гидроакустических средств, установленных на БПА, наибольший вклад в радиальную погрешность вносят погрешности съемки из-за рыскания, крена и дифферента БПА. Немаловажным фактором является и производительность съемки рельефа дна. Производительность съемки рельефа дна зависит от скорости буксируемого БПА и ширины обследуемой полосы рельефа дна. При увеличении полосы съемки рельефа дна точность съемки ухудшается, что требует повышения кратности зондирования рельефа дна посылками импульсов и, следовательно, ведет к уменьшению скорости буксировки. Скорость буксировки БПА также оказывает противоречивое влияние на качество съемки. При увеличении скорости точность улучшается из-за лучшей стабилизации ориентации и глубины БПА, а кратность зондирования рельефа дна гидроакустическим средством для повышения точности уменьшается, т.е. имеет место задача оптимизации выбора скорости буксировки и ширины полосы, обследуемой гидроакустическим средством.
В известных устройствах стабилизации [2, 3] устойчивость движения и ориентации, применительно к надводным судам, достигается за счет использования следящих систем положения рулей как регуляторов с обратной связью для удержания заданного положения судном, позволяет уменьшить отклонение пятна на дне, освещаемого гидроакустическим средством, от расчетного положения.
Однако известные системы стабилизации [2, 3] имеют сложную конструкцию и существенные массогабаритные характеристики, что практически исключает их применение на БПА, имеющих небольшие массогабаритные характеристики.
Кроме того, известное устройство имеет ограничения по глубине и относительно невысокую производительность обследования подводных объектов, имеющих протяженные границы, например магистральные трубопроводы.
Задачей заявляемого технического решения является расширение функциональных возможностей устройства.
Поставленная задача решается за счет того, что в гидроакустическом локационном комплексе, включающем гидролокационное устройство и буксируемый подводной аппарат, в котором гидролокационное устройство состоит из бортовой системы управления, размещенной на борту судна, формирователя сигналов накачки, размещенного внутри подводного аппарата, параметрического излучающего тракта, размещенного на подводном аппарате, приемного тракта, размещенного на подводном аппарате, дежурной управляющей системы, размещенной на подводном аппарате, управляемого блока питания, размещенного на подводном аппарате, видеоконтрольного устройства, размещенного на борту судна; буксируемый подводный аппарат выполнен в виде полого цилиндрического тела со съемной головкой и хвостовыми частями и оснащен носовой и кормовой телекамерами, гидролокатором бокового обзора с дальностью действия 100 м и соединен с судном кабель-тросом; ввод сигнальных жил кабель-троса выполнен в головной части подводного аппарата, кабельные вводы для приемных и излучающих антенн выполнены рядом с антеннами, на боковых частях буксируемого подводного аппарата выполнены установочные площадки для четырех преобразователей накачки, на специальных бандажах крепятся четыре приемные антенны, антенна излучающего тракта наклонена под углом 20 градусов; буксируемый подводный аппарат для уменьшения рыскания и дифферента снабжен хвостовым стабилизатором, выполненным в виде широкополосного обода, соединенного с хвостовой частью цилиндрического корпуса пластинчатыми спицами, стабилизация по крену (вращательное движение вокруг продольной оси) достигается за счет смещения центра тяжести буксируемого подводного аппарата, необходимое заглубление буксируемого подводного аппарата при минимальной вытравке кабель-троса осуществляется путем использования заглубительной решетки для отведения всей буксируемой системы в сторону от судна-носителя, в отличие от прототипа [1], заглубительная решетка дополнительно снабжена контейнерами для размещения привязного телеуправляемого подводного аппарата и автономного подводного аппарата, измерителем положения кабель-троса; автономный подводный аппарат и привязной телеуправляемый подводный аппарат снабжены системой управления движением аппарата вдоль исследуемого подводного объекта, системой обсервации по реперным точкам, аппаратурой для определения положения исследуемого подводного объекта в пространстве, аппаратурой измерения толщины слоя грунта над исследуемым подводным объектом, аппаратурой измерения физических и химических параметров среды, аппаратурой измерения параметров электрохимической защиты исследуемого подводного объекта, выполненного в виде трубопровода, телевизионной и осветительной аппаратурой, системой накопления измерительной информации; привязной телеуправляемый подводный аппарат снабжен гидрофизическим зондом-профилографом, боковые стенки контейнеров выполнены в виде ласточкина хвоста.
Новые отличительные признаки, заключающиеся в том, что заглубительная решетка дополнительно снабжена контейнерами для размещения привязного телеуправляемого подводного аппарата и автономного подводного аппарата, измерителем положения кабель-троса; автономный подводный аппарат снабжен системой управления движением аппарата вдоль исследуемого подводного объекта, системой обсервации по реперным точкам, аппаратурой для определения положения исследуемого подводного объекта в пространстве, аппаратурой измерения толщины слоя грунта над исследуемым подводным объектом, аппаратурой измерения физических и химических параметров среды, аппаратурой измерения параметров электрохимической защиты исследуемого подводного объекта, выполненного в виде трубопровода, телевизионной и осветительной аппаратурой, системой накопления измерительной информации; привязной телеуправляемый подводный аппарат снабжен гидрофизическим зондом-профилографом, боковые стенки контейнеров выполнены в виде ласточкина хвоста, из известного уровня техники не выявлены, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «изобретательский уровень».
Сущность предлагаемого технического решения поясняется чертежами (фиг.1-фиг.6).
Фиг.1. Схема размещения подводных средств в толще воды, где позициями обозначены: 1 - судно-носитель, 2 - буксируемый подводный аппарат, 3 - привязной телеуправляемый подводный аппарат, 4 - автономный подводный аппарат, 5 - заглубительная решетка, 7 - кабель-трос, 8 - боковая стенка контейнера, выполненная в виде ласточкина хвоста, 9 - трубопровод.
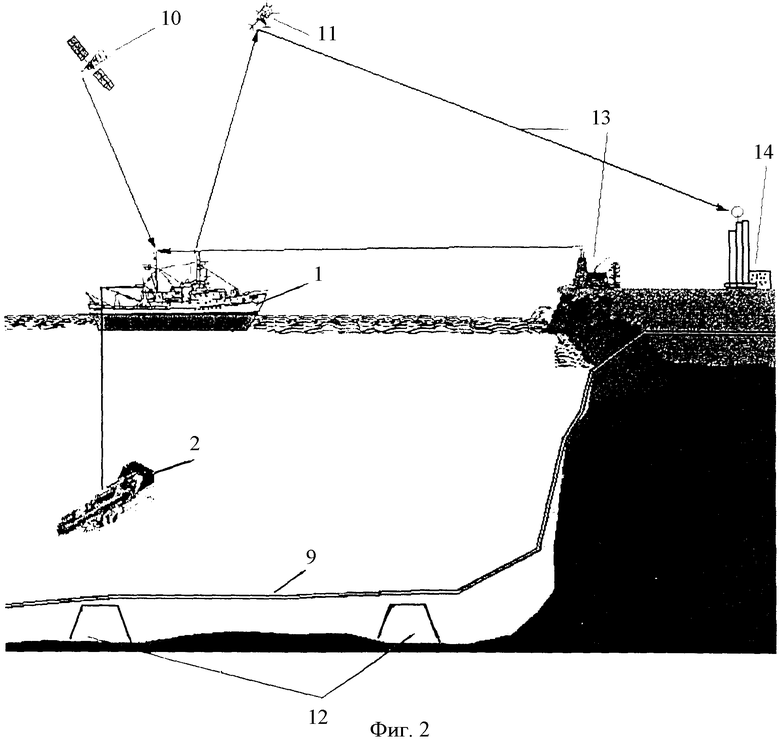
Фиг.2. Схема постановки буксируемого подводного аппарата 3, где позициями обозначены: 1 - судно-носитель, 2 - буксируемый подводный аппарат, 9 - трубопровод, 10 - навигационный искусственный спутник Земли, 11 - связной искусственный спутник Земли, 12 - донные маяки-ответчики, 13 - дифференциальная станция, 14 - центр управления съемочными работами.
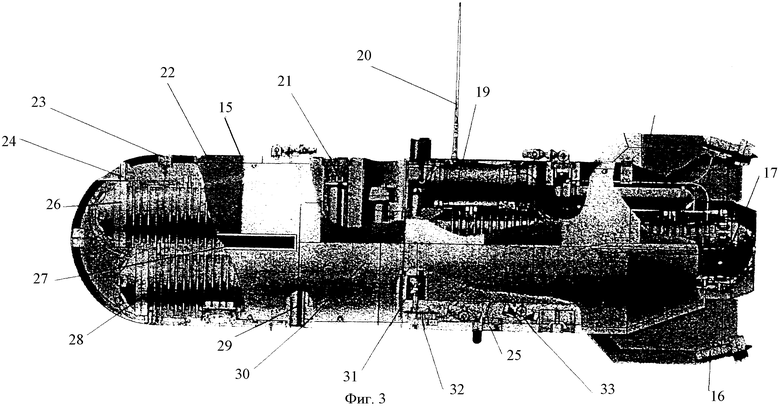
Фиг.3. Общий вид автономного подводного аппарата 4. Автономный подводный аппарат 4 включает корпус 15, движитель 16, контейнер 17 аппаратуры управления, контейнер 18 аппаратуры управления движителем 16, контейнер 19 аппаратуры навигационного позиционирования, антенну 20 радиомаяка, блок 21 измерения гидрологических данных, светосигнализатор 22, датчик 23 относительного лага, эхолоты 24 и 25, контейнер 26 аппаратуры гидролокатора, антенну 27 гидролокатора бокового обзора, контейнер 28 фотокомплекта, балласт погружения 29, отсек 30 аккумуляторов, балласт уравнительный 31, антенну 32 абсолютного лага, светильник фотокомплекта 33.
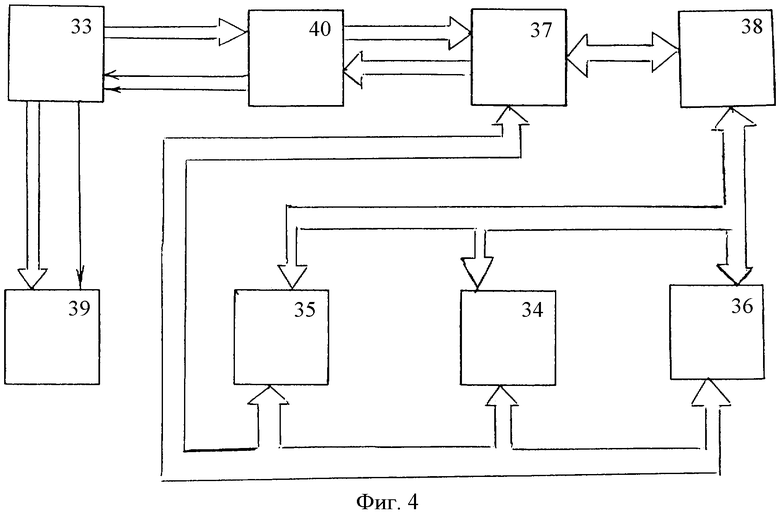
Фиг.4. Структурная схема параметрического профилографа буксируемого подводного аппарата 2, которая включает бортовую систему управления 33, которая размещается на борту судна и предназначена для формирования команд управления режимами работы параметрического профилографа, ввода их в систему телеметрии, приема эхо-сигналов, тест-сигналов, индикации состояния контролируемой системы и выдачи информации на видеоконтрольное устройство, формирователь сигналов накачки 34, размещенный внутри буксируемого подводного аппарата 2 и предназначенный для формирования двухчастотных зондирующих сигналов накачки, заданной длительности и несущей частоты, формирования импульсов синхронизации и сигналов стробирования приемного тракта, параметрический излучающий тракт 35, размещенный на буксируемом подводном аппарате 2 и предназначенный для усиления сигналов накачки (при этом в отдельных каналах восьмиканального усилителя мощности осуществляется коррекция разности фаз и регулировка амплитуд) и преобразования (с помощью многоэлементной мозаичной антенны накачки) в акустические сигналы, приемный тракт 36, размещенный на буксируемом подводном аппарате 2 и предназначенный для преобразования акустической энергии эхо-сигналов в электрические сигналы (с помощью широкополосной приемной антенны), частотной селекции, усиления, обработки сигналов и приведения их к виду, требуемому для передачи по системе телеметрии, дежурная управляющая система 37, размещенная на подводном аппарате 2 и предназначенная для приема команд от системы телеметрии, передачи их в управляемый блок питания 38, параметрический излучающий тракт 35, формирователь сигналов накачки 34 и приемный тракт 36, а также для приема тестовых сигналов, синхроимпульсов и эхо-сигналов для передачи их в систему телеметрии, управляемый блок питания 38, размещенный на буксируемом подводном аппарате 2, предназначен для преобразования переменного напряжения 220 В 400 Гц в требуемый набор постоянных напряжений для формирователя сигналов накачки 34, параметрического излучающего тракта 35, приемного тракта 36, накопления энергии для излучения зондирующего сигнала, а также для выдачи сигналов срабатывания защиты от перегрузки в подсистемах и исполнения команд включения, выключения, включая аварийное выключение, видеоконтрольное устройство 39 размещено на борту судна 1 в составе пульта управления и индикации и предназначено для отображения информации о подводной акустической обстановке в цветовой гамме, соответствующей интенсивности принятых эхо-сигналов в зоне работоспособности профилографа, система телеметрии 40.
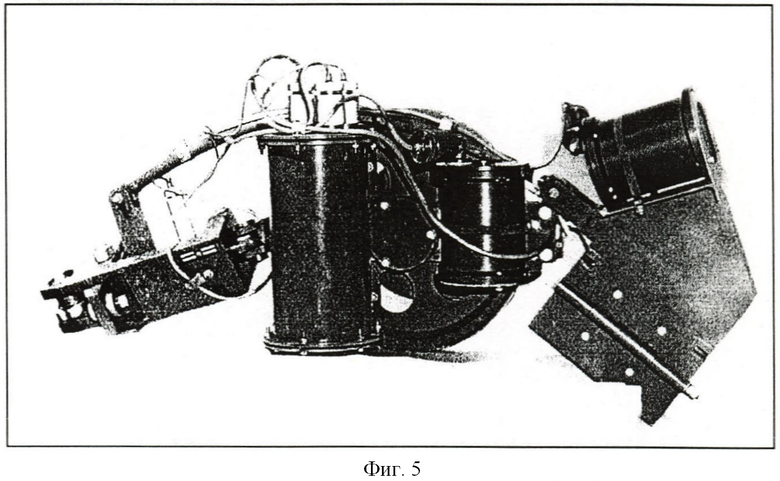
Фиг.5. Общий вид измерителя положения кабеля.
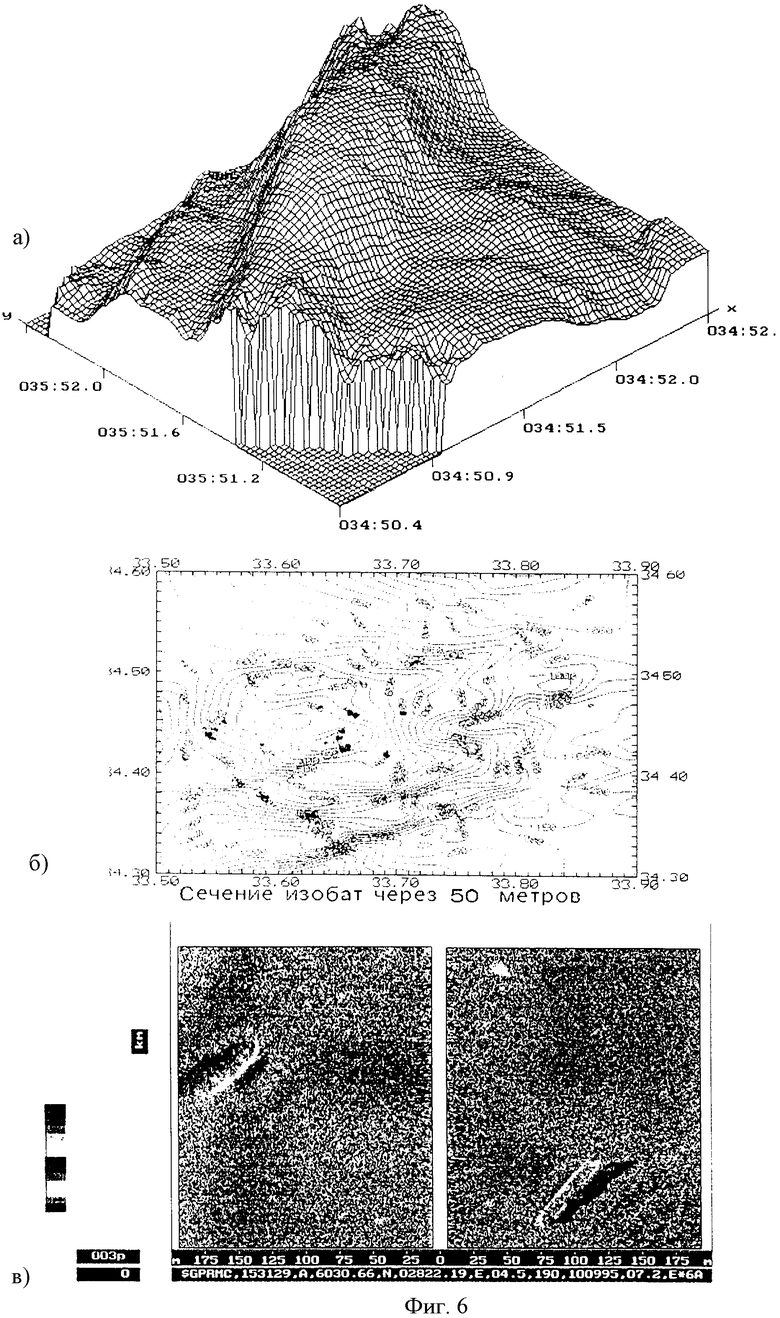
Фиг.6. Пример визуализации информации: 6а - рельеф участка дна, 6б - сечение изобат через 50 м, 6в - обнаружение заиленного трубопровода.
Навигационное оборудование трассы (полигона) включает донные маяки-ответчики с автономностью до 1 года.
Среднеквадратическая погрешность определения места судна-носителя относительно донных маяков-ответчиков не более 10 м на расстоянии 5-7 км в горизонте с учетом вертикального распределения скорости звука.
Буксируемый подводный аппарат (БПА) установлен на заглубительной решетке, которая дополнительно снабжена контейнерами для размещения привязного телеуправляемого подводного аппарата (ПТПА) и автономного подводного аппарата (АПА). При этом боковые стенки контейнеров выполнены в виде ласточкина хвоста, что позволяет реализовать при раскрытии боковых стенок контейнеров дополнительное стабилизирующее приспособление.
Заглубительная решетка снабжена двигательно-движительными установками для лагового (бокового) перемещения, захватами для удержания БПА при координировании с гидроакустическим маяком-ответчиком.
Грузонесущий кабель-трос с нулевой плавучестью, длиной 100-150 км соединяет судно-носитель с заглубительной решеткой и БПА.
Кабель-тросовая лебедка ПТПА емкостью до 250 м размещается на заглубительной решетке.
Постановка заглубительной решетки с размещенными на ней БПА, ПТПА и АПА на заданную глубину осуществляется следующим образом.
Судно-носитель в режиме динамического позиционирования устанавливается в точке выполнения работ. С борта судна с помощью спускоподъемного устройства опускается заглубительная решетка, оснащенная гидроакустическим маяком-ответчиком.
Координаты судна определяются с помощью спутниковой навигационной аппаратуры, а положение заглубительной решетки относительно судна с помощью судовой гидроакустической навигационной системы, взаимодействующей с маяками-ответчиками, установленными на заглубительной решетке.
Боковые смещения заглубительной решетки компенсируются одновременно маневром судна и лаговыми двигательно-движительными установками.
Вертикальные смещения заглубительной решетки отрабатываются изменением длины грузонесущего кабеля.
На заглубительной решетке установлен маяк-ответчик 16В системы СНП-20.
Среднеквадратическая погрешность определения места заглубительной решетки относительно судна-носителя с учетом вертикального профиля скорости звука не более 10 м.
Среднеквадратическая погрешность определения места заглубительной решетки относительно донных маяков-ответчиков не более 10 м на расстоянии 300-500 м в горизонте.
На БПА, как и в прототипе, установлен параметрический профилограф (фиг.4).
Заглубительная решетка снабжена двумя контейнерами, в одном из которых размещается АПА, а в другом ПТПА, соединенный с заглубительной решеткой кабель-тросом длиной до 2,5 км.
Автономный подводный аппарат (АПА) предназначен для периодического обследования положения и состояния подводных участков трубопроводов большой протяженности (до 600 км) с глубиной хода 3-2100 м и скоростью движения до 6 уз. Оборудование АПА включает систему управления движением аппарата вдоль трубопровода, в том числе систему обсервации по реперным точкам, аппаратуру для определения положения трубопровода в пространстве, курсоуказатель, измеритель скорости и пройденного расстояния, аппаратуру измерения толщины слоя грунта над трубой, аппаратуру измерения физических и химических параметров среды, аппаратуру измерения параметров электрохимической защиты трубопровода, телевизионную и осветительную аппаратуру, систему накопления измерительной информации, аппаратуру электропитания, гидроакустическую линию связи, блок подводной навигации, включающий гидроакустические маяки-ответчики, датчики глубины, курса, эхолот, гидролокатор бокового обзора с полосой 2×375 м, сканирующий профилограф в полосе обзора 10-15 м с глубиной проникновения в грунт до 10 м, цветная телекамера со светильниками, двигательно-движительные установки для перемещения АПА по всем направлениям, система управления движением АПА по информационным параметрам (ТВ-камера, профилограф, магнитометрический датчик), гидроакустический маяк-ответчик, приемная аппаратура системы «ведущего кабеля» АВК-83 с дальностью обнаружения трубопровода 25-30 м. Рабочая глубина погружения до 6000 м. Скорость хода 0,5-2,0 уз. Дальность плавания 9 миль.
После установки заглубительной решетки отдаются захватывающие устройства, и ПТПА и АПА отходят от заглубительной решетки. В момент срабатывания захватывающих устройств подается команда на включение движителя АПА.
В зависимости от вида выполняемых работ АПА движется над трубопроводом по данным своего курсоуказателя, производя эхолотирование, видеосъемку и гидроакустическую съемку поверхности грунта.
Среднеквадратическая погрешность определения места АПА относительно маяков-ответчиков не более 10 м.
Перемещение ПТПА производится в пределах плавучего кабеля, соединяющего его с заглубительной решеткой. После выполнения обследования ПТПА и АПА заводятся в заглубительную решетку, которая поднимается на борт судна. Судно переходит в новую точку и технологическая цепочка повторяется.
Привязной телеуправляемый подводный аппарат (ПТПА) предназначен для поиска и обследования подводных объектов на глубинах до 2500 м при скорости буксировки 2-5 узла и времени непрерывной работы 120 часов.
ПТПА оснащен гидролокатором бокового и секторного обзора, сканирующим профилографом, шумопеленгатором утечек газа, анализатором растворенных углеводородов, цветной телевизионной камерой, измерителем токов и потенциалов, кабелем длиной 5 км, диаметром 26 мм.
Сканирующий профилограф представляет собой акустический профилограф типа ПЦ-8М и предназначен для изучения литологического (гранулометрического) состава и строения донных отложений на глубинах от 5 до 6000 м и может быть использован для мониторинга донных отложений, поиска и разведки морских рассыпных месторождений полезных ископаемых, проведения морских инженерно-геологических изысканий, выполняемых для обеспечения строительства морских инженерных сооружений, прокладки трубопроводов, коммуникационных кабельных линий, а также для контроля состояния трассы трубопровода или кабельных линий.
В состав профилографа входят: электронный блок, включающий генератор ЛЧМ-сигналов, генератор формирования импульсов буммерного источника, двухканальный приемный тракт, включающий ПРУ, АРУ, аналого-цифровой преобразователь и сигнальный процессор ADSP-21060; излучающие антенные системы, включающие электродинамический излучатель (буммер), широкополосную пьезокерамическую антенную систему, узкополосную пьезокерамическую антенную систему; две приемные пьезокерамические антенные системы, три забортных устройства, которые предназначены для крепления одной передающей и 2-х приемных антенных систем, устройство управления, отображения обработки и документирования, выполненное на основе системного процессора - Pentium II 200 МГц, 64 Мбайт, 1,7 Гбайт.
Специализированное математическое обеспечение состоит из пакета управляющих и обрабатывающих подпрограмм, которые обеспечивают: формирование зондирующего импульса; коррекцию и согласованную фильтрацию сигнала; обработку сигнала для классификации; классификацию типа грунта в автоматическом и полуавтоматическом режимах; определение акустических характеристик (коэффициенты отражения, акустической восприимчивости, шероховатости, поглощения, плотности, импеданса); отображение графических и цифровых данных; управление аппаратурой профилографа во всех режимах работы; автоматическую калибровку тракта; вывод информации на самописец; вывод информации на накопитель; обслуживание базы данных; прием информации от навигационных датчиков.
Результаты профильных исследований размещаются на стандартных накопителях ПЭВМ (жестких дисках и магнитооптических накопителях).
Основные технические характеристики профилографа: импульсная мощность, подводимая к пьезокерамическим антеннам 3-5 кВт; длительность зондирующего импульса - 1-32 мс; энергия, подводимая к антенной системе, - 800 Дж; минимальный период излучения - 0,5 с; частота дискретизации - до 64 кГц (переменная); разрядность АЦП-16; средняя потребляемая мощность электронного блока - 300 Вт; центральные рабочие частоты: 4;8 кГц, 8 кГц, 3 кГц; полоса излучаемых частот 6 и 3 кГц; чувствительность приемной антенны - 300 мкВ/Па на частоте 6 кГц; скорость профилирования - до 7 уз, время непрерывной работы - 16 часов. Выходная продукция: разрезы донных отложений в электронном виде, грунтовый планшет в электронном виде; в графическом виде на рулонном графопостроителе.
Информация о строении донных отложений и типе донного грунта отображается в реальном масштабе времени на бумажной ленте самописца судового штатного эхолота.
К выходной информации также относится характер распределения плотности по разрезу рыхлой толщи донных отложений, а также классификации рыхлой толщи донного грунта. Эта информация, вместе с материалами плановой привязки, документируется на носителях ПЭВМ и может быть отображена в графическом виде.
В режиме буксировки ПТПА двигается позади БПА. На стопе судна в режиме динамического позиционирования БПА зависает над грунтом, ПТПА двигается вокруг БПА.
На БПА и ПТПА размещаются узлы служебной аппаратуры: электропитания, линии связи, управления, подводной навигации, в том числе датчики глубины, курса, эхолоты, гидроакустические маяки-ответчики.
На ПТПА размещаются двигательно-движительные установки, обеспечивающие его перемещение по всем направлениям. На заглубительной решетке предусмотрены двигательно-движительные установки для лагового (бокового) перемещения, обеспечивающего удержание на заданном боковом отстоянии от исследуемого подводного объекта, например трубопровода, лебедка для ПТПА.
Для получения гидролокационного изображения дна и его профилирования судно буксирует БПА и ПТПА на заданном расстоянии от грунта, в зависимости от длины кабель-троса. Одновременно работают гидролокаторы бокового обзора и/или секторного обзора и профилограф. Координаты судна определяются с помощью спутниковой навигационной аппаратуры, а положение БПА, ПТПА и АПА относительно судна - с помощью судовой гидроакустической навигационной системы, взаимодействующей с маяками-ответчиками.
Боковые смещения буксируемого модуля компенсируются одновременно маневром судна и лаговыми двигательно-движительными установками аппарата. Вертикальные смещения буксируемого модуля отрабатываются изменением длины грузонесущего кабеля. Для телевизионного осмотра судно дает стоп и осуществляет динамическое позиционирование.
При мониторинге трубопровода БПА буксируется вдоль него. На открытых участках движение осуществляется на некотором боковом удалении с использованием гидролокатора бокового обзора. На участках, где трубопровод заглублен в грунт, подается команда на АПА и он движется над ним, используя профилограф в режиме сканирования. При этом определяется профиль дна на расстоянии до 10-15 м с каждой стороны трубопровода через определенные интервалы.
Телевизионный осмотр и контроль трубопровода производятся при положении судна в состоянии динамического позиционирования. Положение АПА относительно БПА определяется с помощью маяка-ответчика, установленного на АПА.
Навигационное оборудование судна-носителя включает систему навигационного позиционирования СНП-20 с антеннами, разнесенными на 15-20 м.
Среднеквадратическая погрешность определения места судна-носителя не более 2-5 м, динамическое позиционирование с точностью 30-60 м.
Судно-носитель также оснащено штатными спусковыми и подъемными устройствами, лебедками или агрегатами «лебедка-вьюшка» с токопереходом и возможностью дистанционного управления при тяговом усилении не менее 8 т.
Система подводной навигации с короткой базой, взаимодействующая с маяками-ответчиками БПА, ПТПА и АПА для определения места аппаратов относительно судна-носителя, включает донные маяки-ответчики, обеспечивающие динамическое позиционирование ПА относительно трубопровода, и судовой программно-аппаратный комплекс на базе ПЭВМ для сбора, обработки, визуализации и документирования данных. Судно-носитель также снабжено гидрофизическим зондом-профилографом типа ГЗП-2000, предназначенным для получения данных о вертикальном распределении течений, скорости звука, температуре, электрической проводимости, определения в реальном масштабе времени плотности, солености, частоты Вяйсяля-Брента, вертикальных сдвигов скорости течения, чисел Ричардсона, осредненных по времени вертикальных распределений абсолютных векторов скорости течений в области пространственно-временных масштабов от 0.25 м и более - по глубине и от 0.2 с и более - по времени.
Гидрографический зонд-профилограф состоит из погружаемого устройства, бортовой аппаратуры, контрольно-проверочной аппаратуры.
Погружаемое устройство (ПУ) содержит измерители составляющих вектора скорости, температуры, электрической проводимости, давления, скорости звука, угловых величин положения ПУ в пространстве. Передача информации производится по одножильному грузонесущему кабелю в бортовую аппаратуру в процессе зондирования с борта судна.
Бортовая аппаратура содержит бортовые измерительные устройства углов положения грузонесущего кабеля, блока кран-балки, длин отрезков сматываемого троса, курса судна, бортовое устройство приема, обработки и выдачи информации на регистрирующие и периферийные устройства. Бортовая аппаратура обеспечивает прием и накопление первичной информации, обработку в реальном масштабе времени непосредственно измеряемых величин, вывод данных на аналоговые регистраторы, цифропечатающие устройства, в специализированную ЭВМ, индикацию в единицах физических величин температуры, электрической проводимости, давления глубины.
Комплекс обеспечивает измерение следующих параметров:
Составляющие скорости течения в осях прибора в диапазоне ±2,5 м/с с разрешением 0,005 м/с. Предельная суммарная погрешность измерений с вероятностью Р=0,997 не более ±(1+0,07V) см/с.
Электрической проводимости в диапазоне:
- в единицах удельной электрической проводимости от 1,5 до 7 См/м;
- в единицах относительной электрической проводимости от 0,35 до 1,6.
Измерения проводятся с разрешением 6·10-5 и пределом допустимого значения суммарной погрешности с вероятностью Р=0,997 не более ±1,2·10-3 (в единицах относительной электрической проводимости).
Температуры в диапазонах от минус 2 до +35°С с разрешением 0,0025°С и пределом допустимого значения статической погрешности с вероятностью Р=0,997 не более ±0,05°С. Показатель тепловой инерции не более 0,05 с при скорости обтекания, превышающей 0,5 м/с.
Скорости звука в диапазоне от 1400 до 1600 м/с с разрешением 0,5 см/с и пределом допустимого значения суммарной погрешности измерений с вероятностью Р=0,997 не более ±0,5 м/с.
Гидростатического давления в диапазоне от 0 до 20 МПа с разрешением 0,0025 МПа и пределом допускаемой суммарной погрешности с вероятностью Р=0,997 не более 0,5% от Pmax.
Для контроля и коррекции погрешностей, возникающих при отклонении продольной оси от плоскости магнитного меридиана, сноса от борта судна при погружении и дрейфе судна, в комплексе измеряются также:
- угол между горизонтальными проекциями координатной оси погружаемого устройства и магнитным меридианом в диапазоне от 0 до 60° с ценой единицы младшего разряда не более 1,5° и пределом допускаемого значения погрешности при доверительной вероятности Р=0,95 не более ±3°.
- углы крена и дифферента погружаемого устройства в диапазоне от минус 45 до 45° с ценой единицы младшего разряда не более 0,5° с пределом допускаемого значения погрешности при доверительной вероятности Р=0,95 не более ±0,5°.
- длина отрезков сматываемого грузонесущего кабеля в диапазоне от 0 до 3200 м с ценой единицы младшего разряда не более 0,1 м и пределом допускаемого значения погрешности при доверительной вероятности Р=0,95 не более ±2 м.
- угол между горизонтальным сечением плоскости блока кран-балки и горизонтальной проекцией условной продольной оси судна в диапазоне от 0 до 180° с ценой единицы младшего разряда не более 1° и пределом допускаемого значения погрешности при доверительной вероятности Р=0,95 не более ±3°.
- угол отклонения грузонесущего кабеля от вертикали вблизи блока в диапазоне от минус 10 до 80° с ценой единицы младшего разряда не более 1° и пределом допускаемого значения относительной погрешности при доверительной вероятности Р=0,95 не более ±3°.
Курс судна в диапазоне от 0 до 360° с ценой единицы младшего разряда не более 0,5° и пределом допускаемого значения относительной погрешности преобразования показаний репитера компаса при доверительной вероятности Р=0,95 не более 0,5°.
Масса погружаемого устройства (в воздухе) не более 120 кг, масса бортовой аппаратуры не более 100 кг без учета массы ЭВМ и периферийных устройств.
Измерения производятся путем вертикального зондирования морской воды с борта судна, в дрейфе.
Метрологическая аттестация аппаратуры в целях обеспечения необходимой достоверности результатов осуществляется дважды, до и после проведения морских изысканий.
Результаты измерений проходят полный цикл обработки в квазиреальном масштабе времени и хранятся в виде цифровых массивов данных в памяти ПЭВМ. Отображение результатов измерений выполняется на устройствах графической регистрации информации.
Судовая система планирования, автоматического сбора, регистрации и обработки типа «dKart HIDROCRAPHER» обеспечивает автоматизированное планирование гидрографических работ (нарезка планшетов, прокладка галсов, осей канала, нанесение береговой черты); сбор, первичную обработку и селектирование данных от внешней контрольно-измерительной аппаратуры в режиме реального времени; постобработку, камеральную обработку и редактирование полученных данных на ПЭВМ (построение модели рельефа, создание трехмерного изображения модели рельефа, построение изобат) профиля рельефа, построение и вывод отчетного планшета на принтер, экспорт данных в форматы HyKit и dKart.
Автоматизированные гидрографические комплексы (АГК) площадной съемки АГК ПС-1500, АГК ПС-5000 предназначены для площадного обследования, съемки рельефа и грунта дна на глубинах от 30 до 1500 м и от 80 до 5000 м соответственно, а также поиска подводных объектов и навигационных опасностей естественного и искусственного происхождения.
В состав комплекса АГК ПС-1500 и АГК ПС-5000 входит система автоматизированной обработки информации на базе ПЭВМ PC AT/486, навигационные датчики.
Специализированное математическое обеспечение состоит из пакетов прикладных программ для обеспечения обработки гидрографической, навигационной и гидроакустической информации на всех этапах съемки и обработки. Обеспечивает хранение, архивацию и отображение информации.
Выходная продукция: батиметрический планшет, гидролокационный планшет, грунтовый планшет в электронном виде в проекции Меркатора (фиг.6).
Электронная навигационная система типа "Сегмент", обеспечивающая конвертацию данных ENC в соответствии со стандартом IHO S-57; отображение SENC с соответствии со стандартом IHO S-52; набор функций в соответствии со стандартом IHO (резолюция А 817(19)) на технико-эксплуатационные характеристики ECDIS; использование информации штатных судовых приемоиндикаторов спутниковых и радионавигационных систем, гирокомпаса, лага.
Аппаратно система реализуется на морском персональном компьютере МК-2 в настольном исполнении.
Морская станция спутниковой связи стандарта ИНМАРСАТ Мини-М типа ТТ-3046 включает: приемопередатчик; стабилизированную антенну с антенным усилителем; телефонную трубку с подставкой; антенный кабель; блок питания на =10-32 В и предназначена для передачи речевой и цифровой информации через порт RS-232C со скоростью передачи до 2,4 Кбод.
Судовое гидрографическое оборудование также включает: однолучевой промерный эхолот ПЭЛ-4М, глубоководный промерный эхолот ГЭЛ-3 и акустический профилограф типа ПЦ-8.
Однолучевой промерный эхолот ПЭЛ-4М предназначен для измерения глубин и записи профиля дна под килем судна при производстве гидрографических работ и состоит из вибратора (врезной или в забортном устройстве); центрального прибора с самописцем; цифрового указателя глубин; блоков связи с комплексами обработки информации; тарирующего устройства; блока сопряжения с измерителем угла качки и вертикальных перемещений судна.
Основные технические характеристики:
измерение глубин на двух поддиапазонах - 0-40 м и 0-200 м, с фазировкой 35-75 м и 175-375 м;
предельная инструментальная погрешность измерения глубин с вероятностью 0,95: от 0 до 10 м составляет 0,1 м, от 10 до 400 м составляет 1% от измеренной глубины.
При выполнении гидрографических работ эхолот ПЭЛ-4М работает в комплексе с АГК ПС-200 и ПЦ-8 и служит средством контроля за точностью и достоверностью принимаемой информации о рельефе дна.
Наличие цифрового канала приема информации об измеренных глубинах позволяет выполнять одновременную обработку данных площадной съемки рельефа дна от автоматизированного гидрографического комплекса АГК ПС-200 и съемки профилей дна от эхолота ПЭЛ-4М. Наличие самописца позволяет выполнить вторичный контроль данных съемки, а также является средством документирования результатов измерения глубин.
Глубоководный промерный эхолот типа ГЭЛ-3 предназначен для измерения глубин и записи профиля дна при производстве гидрографических работ.
Состав эхолота типа ГЭЛ-3 включает: центральный прибор; передатчик; приемник; вибратор; кабельную лебедку; сетевой фильтр; преобразователь ПО-1 с пускорегулирующей аппаратурой; измеритель угла качки и вертикальных перемещений типа «Волна».
Основные технические характеристики: измерение глубин от 20 до 10000 м при наклонах дна до 30°, скорости хода до 20 уз., бортовой качке до 10° и килевой качке до 3°; поддиапазоны измерений 0-250 м; 0-1000 м, 0-2500 м и 0-10000 м, при использовании фазировки на шкале 0-2500 могут быть измерены глубины до 5000 м; предельная инструментальная погрешность измерения глубин с вероятностью 0,95 на глубинах от 0 до 250 м составляет 0,14 м; от 0 до 1000 м - 0,65 м; от 0 до 2500 м - 1,63 м; от 0 до 10000 м - 7,50 м, соответственно. Значения измеренных глубин транслируются на телеграфный аппарат типа СТА-М67 и вычислительные средства автоматизированного гидрографического комплекса площадной съемки.
При выполнении гидрографических работ эхолот ГЭЛ-3 работает в комплексе с АГК ПС-1500, КГК ПС-5000 и ПЦ-8 и служит средством контроля достоверности принимаемой информации о рельефе дна.
Наличие связи с вычислительными средствами АГК позволяет выполнять одновременную обработку данных площадной съемки рельефа дна от автоматизированных гидрографических комплексов АГК ПС-1500, АГК ПС-5000. Наличие самописца позволяет выполнить вторичный контроль данных съемки, а также является средством документирования результатов измерения глубин.
Автоматизированный гидрографический комплекс площадной съемки рельефа и грунта дна типа АГК ПС-200 предназначен для площадного обследования, съемки рельефа и грунта дна на глубинах от 5 до 400 м, а также поиска малоразмерных объектов и навигационных опасностей естественного и искусственного происхождения.
Состав комплекса включает:
- электронный блок, предназначенный для формирования зондирующих импульсов и всех необходимых импульсных последовательностей для синхронизации работы комплекса и организации процесса оптимальной обработки эхо-сигналов. В электронном блоке также находятся полосовые и предварительные усилители, АРУ, ВАРУ и аналого-цифровые преобразователи, а также источники питания;
- две антенные решетки: для приема и передачи гидроакустических сигналов левого и правого бортов. Каждая антенная решетка состоит из 2-х излучающих блоков и 3-х приемных;
- два забортных устройства, предназначенные для установки антенных решеток за бортом судна, что позволяет обеспечить заглубление антенн до 2-х метров и обеспечить наклон антенных решеток относительно вертикальной плоскости 0-30° с погрешностью установки угла наклона 0,5°;
- центральная ЭВМ комплекса, представляющая из себя доработанную IBM PC AT-486, предназначена для управления, сбора информации от комплекса, навигационных датчиков, датчика качки и вертикальных перемещений судна, типа "Волна".
Комплекс обеспечивает обработку сигналов и отображение информации на дисплее, формирование файлов первичной информации и их хранение, а также обеспечивает режимы: планирование съемки, управление съемкой и контроль съемки в реальном времени, архивизацию данных, постобработку и контроль качества выходной информации, формирование базы данных в форматах для отображения на графопостроителе или накопления в судовом картографическом банке данных.
Специализированное математическое обеспечение состоит из пакетов прикладных программ для обеспечения обработки гидрографической, навигационной и гидроакустической информации на всех этапах съемки и обработки. Обеспечивает хранение, архивацию и отображение информации.
Хранение информации осуществляется на жестком диске, на гибких дисках, стример-кассетах и на видеокассетах в системе "Arvid". Возможно подключение магнитнооптической памяти, плоттеров и регистраторов.
Основные технические характеристики; глубина съемки 5-400 м; полоса батиметрической съемки с предельной погрешностью измерения глубин с вероятностью 0,95 не более 1% от измеряемой глубины - 6Z (Z - глубина под акустическими антеннами); полоса гидролокационной съемки - 10Z; скорость съемки - до 5 уз; разрешение в горизонтальной плоскости - 1°; разрешение по дальности - 0,1-0,7 м; число глубин за 1 цикл зондирования - 280 или при повышенном разрешении до 500.
Выбор той или иной АГК определяется в основном составом штатного оборудования, установленного на судне-носителе. Для реализации заявляемого устройства возможно использование находящихся в составе флота гидрографических судов проектов 862 или специальных судов.
Состав судового оборудования судна проекта 862 включает следующее оборудование.
Навигационное оборудование: корабельная аппаратура потребителей спутниковых навигационных систем ГЛОНАСС/НАВСТАР - «Бриз-К»; судовой приемник радиомаяка дифференциальной GPS GR-80; судовой приемник NT 300 D; система навигационного позиционирования СНП-20; электронная навигационная и информационная система «Сегмент».
Связное оборудование: морская станция спутниковой связи стандарта ИНМАРСАТ Мини-М.
Гидрографическое оборудование: глубоководный промерный эхолот ГЭЛ 3 (штатный); однолучевой промерный эхолот ПЭЛ-4М; автоматизированный гидрографический комплекс площадной съемки АГКПС-200; автоматизированные гидрографические комплексы площадной съемки АГКПС-1500, АГКПС-5000 (штатные); акустический профилограф ПЦ-8М; система планирования, автоматического сбора, регистрации и обработки d Kart HIDROCRAPHER.
Гидрофизическое оборудование: гидрофизический зонд-профилограф ГЗП-2000; гидролого-гидрохимический зонд ГХ3-2000.
Средства спуска и подъема подводных аппаратов.
Специальное судно типа «Академик Голицин» имеет следующий состав судового оборудования:
Навигационное оборудование: корабельная аппаратура потребителей спутниковых навигационных систем ГЛОНАСС/НАВСТАР - «Бриз-К»; судовой приемник радиомаяка дифференциальной GPS GR-80; судовой приемник типа NT 300 D; система навигационного позиционирования СНП-20; электронная навигационная и информационная система «Сегмент».
Связное оборудование: морская станция спутниковой связи стандарта ИНМАРСАТ Мини-М.
Гидрографическое оборудование: глубоководный промерный эхолот ГЭЛ 3; однолучевой промерный эхолот ПЭЛ-4М; акустический профилограф ПЦ-8М; система планирования, автоматического сбора, регистрации и обработки d Kart HIDROCRAPHER.
Гидрофизическое оборудование: гидрофизический зонд-профилограф ГЗП-2000; гидролого-гидрохимический зонд ГХЗ-2000.
Средства спуска и подъема подводных аппаратов.
Специальное судно проекта 141 имеет следующий состав судового оборудования.
Навигационное оборудование: корабельная аппаратура потребителей спутниковых навигационных систем ГЛОНАСС/НАВСТАР - «Бриз-К»; судовой приемник радиомаяка дифференциальной GPS GR-80; судовой приемник типа NT 300 D; система навигационного позиционирования СНП-20; электронная навигационная и информационная система «Сегмент».
Гидрографическое оборудование: глубоководный промерный эхолот ГЭЛ 3; однолучевой промерный эхолот ПЭЛ-4М; акустический профилограф ПЦ-8М; система планирования, автоматического сбора, регистрации и обработки d Kart HIDROCRAPHER.
Гидрофизическое оборудование: гидрофизический зонд-профилограф ГЗП-2000;
Средства спуска и подъема подводных аппаратов.
Необходимым условием обеспечения безопасного функционирования морских трубопроводных систем является проведение эксплуатационного мониторинга, что связано с необходимостью обеспечения контроля их технического состояния на основе определения их характеристик, оценки возможности безаварийной эксплуатации и выработки рекомендаций по производству ремонтно-восстановительных работ в целях поддержания нормального режима функционирования систем.
Подход к решению задачи эксплуатационного мониторинга морских трубопроводных систем в общем случае включает привлекаемые силы и средства.
Специализированное судно-носитель с системой динамического позиционирования и судовым оборудованием, включающим навигационное оборудование: корабельная аппаратура потребителей спутниковых навигационных систем, судовой приемник радиомаяка дифференциальной системы, навигационная гидроакустическая система с короткой базой, электронная навигационная и информационная система; связное оборудование: морская станция спутниковой связи; гидрографическое оборудование: глубоководный промерный эхолот, автоматизированный гидрографический комплекс площадной съемки, акустический профилограф, система планирования, автоматического сбора, регистрации и обработки данных; гидрофизическое и гидрохимическое оборудование: гидролого-гидрофизический зонд, гидролого-химический зонд; штатные грузоподъемные и специальные обеспечивающие устройства; подводные аппараты: автономный самоходный подводный аппарат (АПА) для обследования состояния трубопровода по всей протяженности трассы, оснащенный аппаратурой для определения положения трубопровода в пространстве, для измерения толщины слоя грунта над трубой, для измерения физических и химических параметров в водной среде, для измерения параметров электрохимической защиты трубопровода, телевизионная аппаратура, бортовой вычислительный комплекс; двухзвенный привязной телеуправляемый подводный аппарат (ПТПА) - для детального контроля дефектных или потенциально опасных участков трубопровода, оснащенный гидролокатором бокового и/или секторного обзора, сканирующим профилографом, шумопеленгатором утечки газа, анализатором растворенных углеводородов, измерителем токов и потенциалов, цветной телевизионной камерой.
Наземное навигационное оборудование включает: береговые станции для обеспечения работы спутниковых судовых приемоиндикаторов в дифференциальном режиме. Навигационное оборудование трассы трубопровода включает донные маяки-ответчики.
Выбор конкретных типов и состава оборудования осуществляется на основе анализа отечественной и зарубежной техники с учетом обеспечения требований Международных стандартов.
Организация мониторинга трубопровода производится в три этапа:
Первый этап включает периодический осмотр технического состояния и положения в пространстве трубопровода (в соответствии с установленными нормами и регламентами проведения работ) по всей протяженности трассы.
Привлекаемые силы и средства: судовое навигационное оборудование, автономный самоходный подводный аппарат.
Организация работ предусматривает: определение глубины залегания трубопровода и толщины слоя грунта над трубопроводом, измерение физических и химических параметров среды, измерение параметров электрохимической защиты трубопровода, оценку состояния изоляционного покрытия трубопровода, видеосъемку дефектных участков трубопровода.
Второй этап включает детальный контроль дефектных или потенциально опасных участков трубопровода, обеспечивающий:
высокоточное определение планово-высотного положения участков трубопровода;
обнаружение размывов и наносов грунта, провисания трубопроводов;
измерение толщины грунта над трубопроводом;
картографирование рельефа морского дна;
определение строения грунта на участках трассы трубопровода;
оценка состояния изоляционного покрытия трубопровода;
определение мест утечки газа;
видеосъемку дефектных или потенциально опасных участков трубопровода.
Силы и средства:
судовое навигационное, гидрофизическое и гидрохимическое оборудование;
двухзвенный привязной телеуправляемый подводный аппарат.
Третий этап включает диагностику для выявления напряженно деформированных участков трубопровода, а именно:
определение координат оси трубопровода;
определение координат потенциально опасных напряженно деформированных участков трубопровода (радиус кривизны, высота гофр, вмятин, выпуклостей, изменения диаметра). Проведение эксплуатационного мониторинга морских трубопроводных систем путем использования предлагаемого технического решения обеспечит оценку их состояния и качественный контроль характеристик, а также своевременное принятие необходимых мер по безаварийной эксплуатации или производству ремонтно-восстановительных работ, а при выполнении батиметрической съемки в районах со сложным подводным рельефом позволит повысить производительность съемки за счет избыточности зарегистрированной информации.
Предлагаемое техническое решение базируется на серийно освоенных устройствах и апробированных узлах и элементах, а также на апробированном программном обеспечении, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «промышленная применимость».
Источники информации
1. В.А.Воронин, С.П.Тарасов, В.И.Тимощенко. Гидроакустические параметрические системы. Ростов-на-Дону. ООО Ростиздат. 2004, с.257.
2. Авторское свидетельство СССР №1308040.
3. Авторское свидетельство СССР №1360405.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
Изобретение относится к области производства подводных работ с использованием буксируемых подводных аппаратов (БПА), преимущественно оснащенных гидроакустической измерительной аппаратурой, и предназначено для обеспечения пространственной ориентации буксируемого подводного аппарата относительно судна буксировщика и исследуемого подводного объекта. Техническим результатом изобретения является расширение функциональных возможностей устройства. Для, например, проведения мониторинга трубопровода 9 гидроакустический локационный комплекс использует судно-носитель 1, буксируемый с помощью кабель-троса 7, подводный аппарат 2 и привязной телеуправляемый подводный аппарат 3, автономный подводный аппарат 4, навигационный искусственный спутник Земли 10, связной искусственный спутник Земли 11, донные маяки-ответчики 12, дифференциальную станцию 13, центр управления съемочными работами 14. Буксируемый подводный аппарат содержит заглубительную решетку 5, боковая стенка контейнера выполнена в виде ласточкина хвоста 8. 6 ил.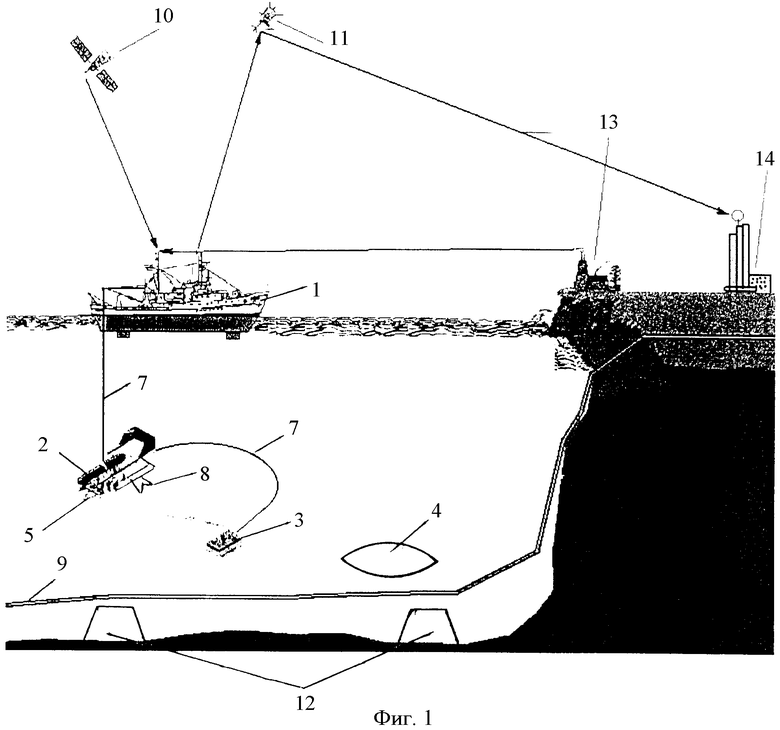
Гидроакустический локационный комплекс, включающий гидролокационное устройство и буксируемый подводной аппарат, в котором гидролокационный комплекс состоит из бортовой системы управления, размещенной на борту судна, формирователя сигналов накачки, размещенного внутри буксируемого подводного аппарата, параметрического излучающего тракта, размещенного на буксируемом подводном аппарате, приемного тракта, размещенного на буксируемом подводном аппарате, дежурной управляющей системы, размещенной на буксируемом подводном аппарате, управляемого блока питания, размещенного на буксируемом подводном аппарате, видеоконтрольного устройства, размещенного на борту судна, а буксируемый подводный аппарат, выполнен в виде полого цилиндрического тела со съемной головкой и хвостовыми частями и оснащенный носовой и кормовой телекамерами, гидролокатором бокового обзора с дальностью действия 100 м, и соединен с судном кабель-тросом; ввод сигнальных жил кабель-троса выполнен в головной части подводного аппарата, кабельные вводы для приемных и излучающих антенн выполнены рядом с антеннами, на боковых частях буксируемого подводного аппарата выполнены установочные площадки для четырех преобразователей накачки, на специальных бандажах крепятся четыре приемные антенны, антенна излучающего тракта наклонена под углом 20°; буксируемый подводный аппарат для уменьшения рыскания и дифферента снабжен хвостовым стабилизатором, выполненным в виде широкополосного обода, соединенного с хвостовой частью цилиндрического корпуса пластинчатыми спицами, стабилизация по крену (вращательное движение вокруг продольной оси) достигается за счет смещения центра тяжести буксируемого подводного аппарата, необходимое заглубление буксируемого подводного аппарата при минимальной вытравке кабель-троса осуществляется путем использования заглубительной решетки для отведения всей буксируемой системы в сторону от судна-носителя, отличающийся тем, что заглубительная решетка дополнительно снабжена контейнерами для размещения привязного телеуправляемого подводного аппарата и автономного подводного аппарата, измерителем положения кабель-троса; автономный подводный аппарат и привязной телеуправляемый подводный аппарат снабжены системой управления движением аппарата вдоль исследуемого подводного объекта, системой обсервации по реперным точкам, аппаратурой для определения местоположения исследуемого подводного объекта в пространстве, аппаратурой измерения толщины слоя грунта над исследуемым подводным объектом, аппаратурой измерения физических и химических параметров среды, аппаратурой измерения параметров электрохимической защиты исследуемого подводного объекта, выполненного в виде трубопровода, телевизионной и осветительной аппаратурой, системой накопления измерительной информации; привязной телеуправляемый подводный аппарат снабжен гидрофизическим зондом-профилографом, боковые стенки контейнеров выполнены в виде ласточкина хвоста.
| RU 38233 U1, 27.05.2004 | |||
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛОКАТОР С БУКСИРУЕМЫМ ПРЕОБРАЗОВАТЕЛЕМ НАКАЧКИ | 2000 |
|
RU2168742C1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1999 |
|
RU2149424C1 |
| US 2007242134 A1, 18.10.2007 | |||
| US 2002064092 A1, 30.05.2002 | |||
| СПОСОБ ПОЛУЧЕНИЯ ХЛЕБНОГО КВАСА | 2015 |
|
RU2590032C1 |

