Известные действующие модели движения искусственного спутника земли, включающие глобус и укрепленную на кронштейне модель искусственного спутника, приводимые во вращение от привода, и пищущее устройство, обладают тем недостатком, что они демонстрируют не все особенности движения спутника, а только его движение при постоянном уже наклоне плоскости орбиты к плоскости экватора и движение по круговым орбитам с постоянной скоростью.
Предлагаемая действующая модель движения искусственного спутника земли не имеет указанного недостатка и позволяет:
1.Демонстрировать вращение Земли (глобуса) и обращение искусственного спутника по любой орбите в ускоренном масштабе2.Изменять эксцентриситет орбиты, причем одновременно и соответственно закону Коплера изменяется скорость движения спутника в перигее и апогее (последние могут изменяться в значительных интервалах)3.Модель может быть использована для графического вычисления проекции траектории движения спутников на поверхности глобуса.
Кроме того, предлагаемая действующая модель позволяет учитывать прецессию Земли, движения большой полуоси орбиты искусственного спутника и демонстрировать запуск его из любой точки Земли под разными углами к экватору в пределах от О до 90°Конструктивные особенности предлагаемой действующей модели движения искусственного спутника земли заключаются в следующем: приводы модели спутника и глобуса смонтированы раздельно, причем привод модели спутника выполнен в виде кинематически связанного с электродвигателем сменного шаблона, имеющего паз, и консольного являющегося продолжением кронштейна спутника рычага с пальцем, перемещающимся в пазу шаблона, и обеспечивающих кронштейну, кроме вращательного движения, также и возвратно-поступательное.
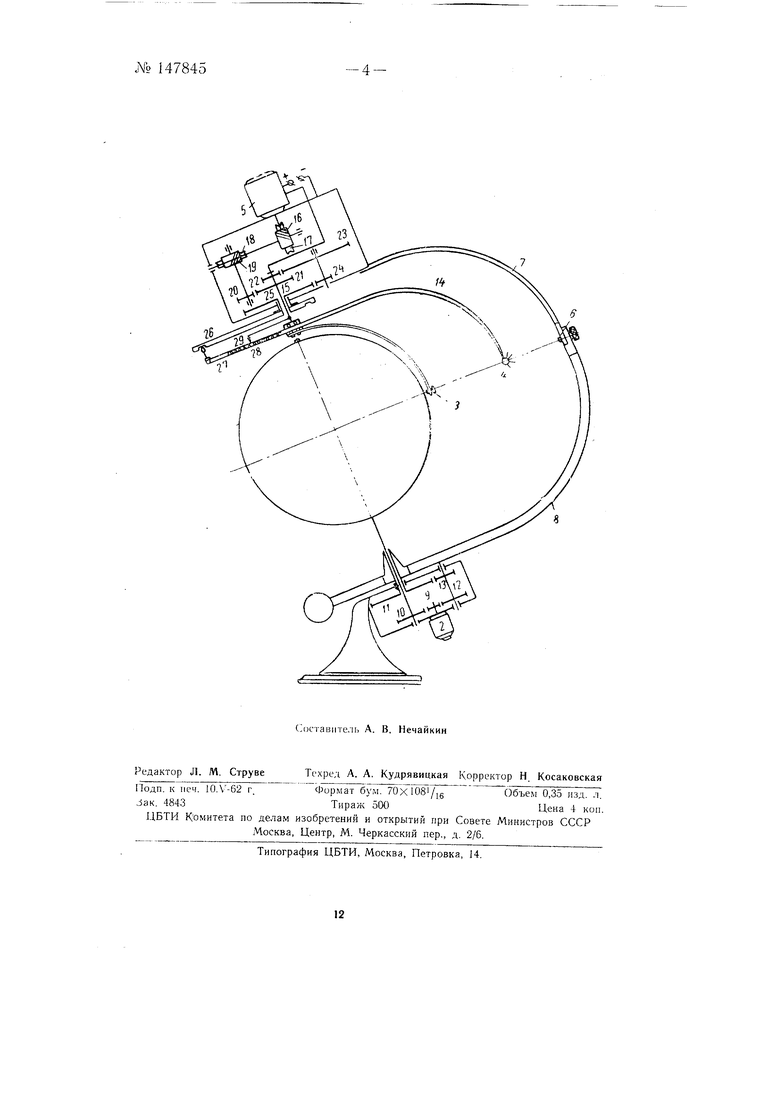
№ 147845- 2 - Для изменения скорости движения модели сиутника в теригее и апогее на консольном рычаге кронштейна имеется сопротивление, взаимодействующее при возвратно-поступательном движении кронштейна с контактом для изменения числа оборотов электродвигателя. Привод модели искусственного спутника смонтирован на дугообразном вращающемся вокруг оси глобуса и кинематически связанном с приводом его кронштейне, состоящем из двух шарнирно соединенных частей с возможностью поворота одной из них вместе с приводом в шарнире относительно плоскости экватораНа чертеже схематически избражена действующая модель движения искусственного спутника земли (в положении, когда ллоскость орбиты спутника совпадает с плоскостью экватора земли.
На схеме обозначены следующие основные элементы действующей модели: глобус / (Земля), приводимый во вращение от электродвигателя 2; пищущее устройство 3; модель искусственного спутника 4, приводимая в движение от электродвигателя 5; дугообразный вращающийся вокруг оси глобуса / кронщтейн, на котором смонтирован привод модели спутника 4, состоящий из двух соединенных ojapHHpOM 6 частей 7 и 8.
От электродвигателя 2 вращение глобусу 1 передается через шестерни 9 и 10, последняя из которых составляет одно целое с осью глобуса /; от шестерни 9 движение передается шестерне 11, через промежуточные шестерни 12 и 13, насаженные на общем валу, причем шестерня.// жестко укреплена на части 5 дугообразного кронщтейна, которая поворачивается вместе с этой шестерней.
Модель искусственного спутника 4 укреплена на конце свободно -перемещающегося кронштейна 14, получающего вращение вместе с моделью спутника 4 вокруг глобуса / посредством вала 15; от электродвигателя 5 вращение валу 15 передается через червячные пары 16- 17 и 18-19 и щестерни 20 и 21. На валу 15 укреплена шестерня 22, сцепленная с шестерней 23, насаженной на общем валу с шестерней 24, вращающей щестерню 25. К последней прикреплен сменный шаблон 26, имеющий паз, в который входит палец консольного рычага 27, являющегося концом кронштейна 14 и снабженного электрическим сопротивлением 28, взаимодействующим со скользящим контактом 29, включенным в электрическую цепь электродвигателя 5. Сменный шаблон 26, выполняется отдельно для каждой данной эллиптической орбиты движения спутника 4 и прикрепляется к фланцу шестерни 25. Для демонстрации движения спутника 4 по круговой орбите сменный щаблон снимается, а кронщтейн 14 винтом фиксируется на валу 15. Вращение большой оси эллипса спутника 4 вокруг центра глобуса / (Земли) в плоскости орбиты осуществляется за счет вращения щестерни 25 и закрепленного на ней щаблона.
При возв ратно-поступательном перемещении кронштейна 14 (когда он не зафиксирован на валу 15) относительно вертикальной оси глобуса / электрический контакт 29 скользит по электрическому сопротивлению 28, в результате чего изменяется скорость вращения электродвигателя 5 и скорость движения спутника 4 в перигее и в апогее; электрическое сопротивление 28 подбирается таким образо.м, что изменение движения соответствует закону Кеплера. Изменение угла наклона орбиты спутника 4 достигается поворотом части 7 дугообразного кронштейна в шарнире 6, который расположен в плоскости экватора глобуса / (Земли). Поворотом всего механизма привода движения спутника можно осуществить наклон орбиты его движения в обе стороны по отношению к глобусу /.
По заключению политехнического музея и Всесоюзного общества по распространению политических и научных знаний, заключению Московского планетария предлагаемая действующая модель движения искусственного спутника земли может быть использована и как наглядное учебное пособие для гнкол, институтов, планетариев, музеев, подробно демонстрирующая особенности искусственных спутников, и как установка позволяющая с достаточной точностью предопределять движение конкретного спутника, что может иметь значение для наблюдательных стаяций и научных институтов.
Предмет изобретени-я
1.Действующая модель движения искусственного спутника Земли, включающая глобус, укрепленную на кронщтейне модель искусственного спутника, приводимые во вращение от привода, и пищущее устройство, отличающаяся тем, что, с целью наглядного изображения движения спутника по различным орбитам (круговым и эллиптическим), приводы модели спутника и глобуса смонтированы раздельно, причем привод модели искусственного спутника Земли выполнен в виде кинематически связанного с электродвигателем сменного щаблона с пазом и консольного, являющегося продолжением кронштейна спутника рычага с пальцем, предназначенным для перемещения в пазу щаблона, и обеспечивающих кронщтейну, кроме вращательного движения, также и возвратно-поступательное, а следовательно, движение спутнику по заданной орбите с возможностью демонстрации высоты апогея и перигея, при этом для изменения скорости движения модели спутника в перигее и апогее на консольном рычаге кронщтейна намотано сопротивление, взаимодействующее при возвратно-поступательном движении кронштейна с контактом для изменения числа оборотов электродвигателя2.Действующая модель движения искусственного спутника Земли по п. 1, о тл и ч а ю щ а я ся тем, что, с целью обеспечения вращения плоск;ости орбиты модели искусственного спутника Земли вокруг оси вращения глобуса и возможности изменения угла наклона плоскости орбиты к плоскости экватора, привод модели искусственного спутника Земли смонтирован на дугообразном вращающемся вокруг оси глобуса и кинематически связанном с приводом его кронщтейне, состоящем из двух щарнирно соединенных частей с возможностью поворота одной из них вместе с приводом в шарнире относительно плоскости экватора.
147845