Изобретение относится к учебным пособиям и предназначено для моделирования непрерывного глобального обзора поверхности Земли минимальным числом спутников, находящихся на круговых орбитах одинакового наклонения и радиуса, при чтении лекций и проведении лабораторных занятий по теории полета летательных
аппаратов по разделу баллистическое проектирование систем летательных аппаратов.
Целью изобретения является расширение дидактических возможностей путем демонстрации непрерывного глобального обзора поверхности Земли с учетом ее вращения минимальным числом спутников.
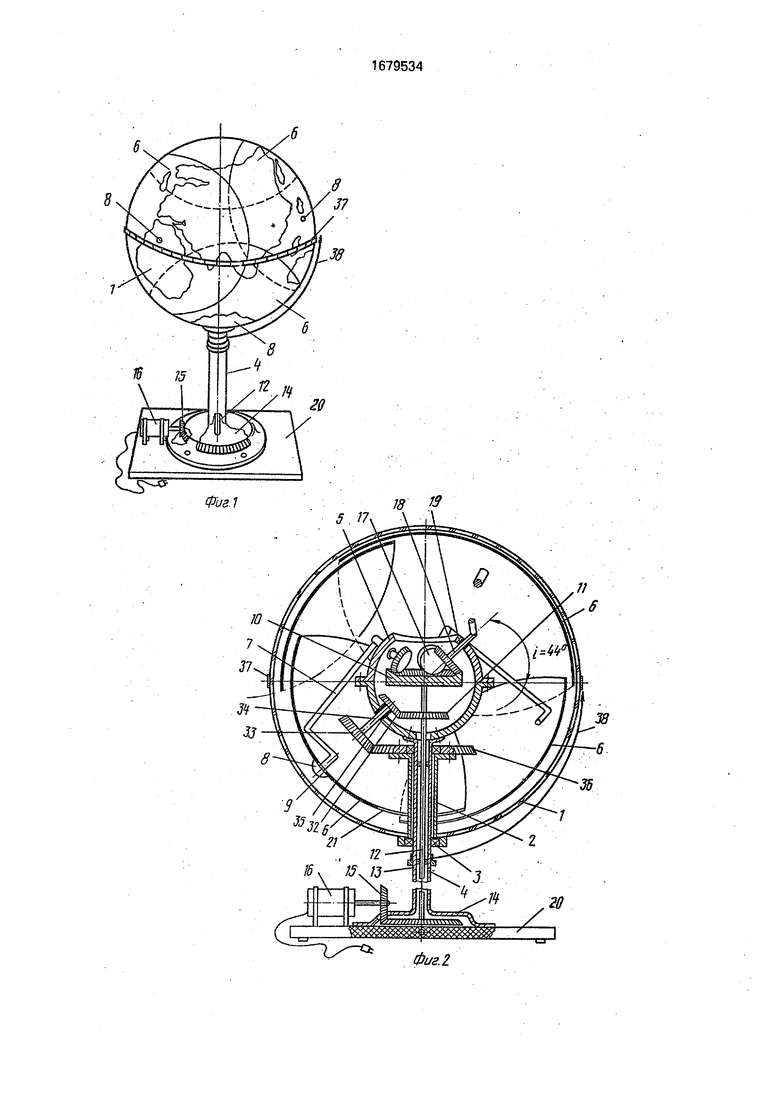
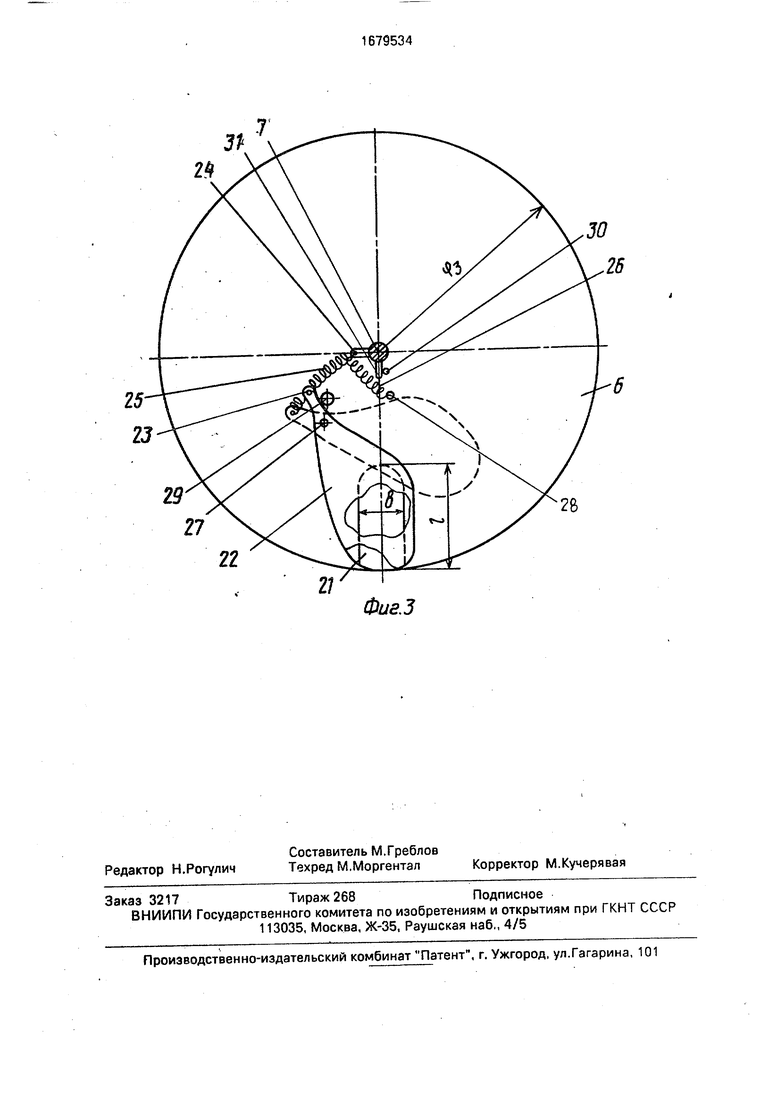
На фиг.1 представлен предлагаемый прибор, общий вид; нафиг.2-тоже, разрез; на фиг.З - вид отдельного сегмента с заслонкой.
Устройство (фиг.1 и 2) содержит глобус 1 с контурами материков, выполненный из прозрачного материала и укрепленный на трубке 2, установленный с помощью подшипников 3 снаружи пустотелой опорной стойки 4, содержащей в верхней части сферическую чашку 5, пять поворотных сферических сегментов 6, раскрашенных в разные цвета, имитирующих круговые зоны обзора бортовой аппаратуры спутников , которые установлены внутри глобуса 1 на дугообразных кронштейнах 7 со свободой поворота относительно них. Одни концы кронштейнов 7 соединены с центрами сегментов со стороны их внутренней части с помощью болтов 8 через отверстия 9, причем головки болтов с внешней стороны сегментов имитируют подспутниковые точки, другие жестко укреплены на осях ведомых шестерен дифференциального механизма и кинематически связаны с ним. Дифференциальный механизм выполнен в виде двух конических ведущих шестерен 10 и 11, жестко укрепленных на ведущем валу 12, установленном на подшипниках 13 внутри опорной стойки 4 и связанном через промежуточную шестерню 14с ведущей шестерней 15 электропривода 16 вращения, при этом первая ведущая шестерня 10 установлена в центре сферической чашки 5.
В сферической чашке 5 опорной стойки 4 расположено пять конических шестерен 17 дифференциального механизма, связанных кинематически с первой ведущей шестерней 10 и через оси 18, установленные во втулках 19 чашки 5, с дугообразными кронштейнами 7 сферических сегментов. Оси 18 конических шестерен 17 жестко связаны с кронштейнами 7 и установлены в чашке 5 под углом 44е к горизонтальной плоскости, проходящей через центр ведущей шестерни 10, чем создаются одинаковые наклонения плоскостей орбит к круговым зонам обзора, выполненным в виде сферических сегментов 6 к плоскости экватора. В горизонтальной плоскости оси 18 установлены через 726, чем создается разнесение восходящих узлов орбит один от другого в плоскости экватора на одинаковые углы.
Подспутниковые точки имитируются головками болтов 8, находящихся снаружи и в центре поворотных сферических сегментов 6 (фиг.1 и 2).
Начальные аргументы широты подспутниковых точек на своих орбитах отличаются друг от друга на угол 72°.
Для создания непрерывного глобального обзора поверхности Земли пятью спутниками, движущимися по круговым орбитам одинакового наклонения i 44° и радиуса,
угловые размеры каждой зоны обзора должны быть одинаковы и равны 138,6°.
Сферические сегменты 6 содержат по краю пазы 21 (фиг.З), в которые частично входит трубка 2 крепления глобуса 1 при
движении сферических сегментов 6 по круговым орбитам, заслонки 22 и держатели 23 и 24 пружин 25 и 26, причем заслонки 22 с держателями 23 установлены на осях 27, укрепленных на сферических сегментах 6.
Держатели 24 закреплены на концах дугообразных кронштейнов 7, пружины 25 соединены с держателями 23 и 24, а пружины 26 соединены одним концом с держателями 24, а другим - со штырями 28, установленными на сферических сегментах 6, где укреплены также упоры 29 для заслонок и упоры 30 для сегментов 6. Упоры 30 упираются в ограничительные штыри 31, укрепленные в дугообразных кронштейнах 7.
Пазы 21 сферических сегментов 6 выполнены шириной b и длиной t где b - диаметр трубки 2 привода глобуса, а
t K-R+|,
где К - коэффициент (К 0,406 рад); R - радиус глобуса, мм. Значение коэффициента К определяется следующим образом. Поскольку наклонение плоскостей орбит к плоскости экватора составляет угол i 44°, то угол между плоскостью любой орбиты и осью глобуса равен t/ 90;J-i 46°.
Отсюда следует, что трубка 2 привода глобуса должна максимально углубляться в сферические сегменты 6 при их движении по своей работе на угол
69,3° - 46° 23,3°, что в радианах составляет 0,406. Если учесть диаметр трубки 2 привода, то получают ис- комое значение t
Вторая ведущая шестерня 11 дифференциального механизма через саттелит- ные шестерни 32 и 33, установленные на концах оси 34, укрепленной во втулке 35 сферической чашки 5, и через ведомую шестерню 36 связана с трубкой 2 поворота глобуса 1.
Снаружи глобуса 1 по линии экватора установлена шкала 37 долгот, а на пустоте- лой опорной стойке 4 укреплен с возможностью поворота указатель 38 шкалы долгот. Опорная стойка 4 и электропривод 16 установлены на основании 20.
Модель работает следующим образом.
Вначале демонстрируется система глобального обзора поверхности Земли с учетом ее вращения с помощью минимального числа спутников. Для этого на электропривод 16 вращения подается питание и при его вращении ведущая шестерня 15 электропривода через промежуточную шестерню 14 начинает поворачивать вал 12, установленный на подшипниках 1 внутри опорной стойки 4, а с ним и две конические ведущие шестерни 10 и 11. Ведущая шестерня 10 поворачивает ведомые конические шестерни 17 дифференциального механизма, а через оси 17, установленные во втулках 19 сферической чашки 5 опорной стойки 4, и дугообразные кронштейны 7 со сферическими сегментами б зон обзора, которые начинают двигаться по своим орбитам внутри прозрачного глобуса 1, при этом подспутниковые точки имитируются головками болтов 19, находящимися в центре разноцветных сегментов 6.
Одновременно вторая ведущая шестерня 10 поворачивает через сателлитные шестерни 32 и33 и ведомую шестерню36трубку 2 поворота глобуса и сам глобус 1 относительно опорной стойки 4, имитируя вращение Земли.
На каждом обороте сферических сегментов 6 по своим орбитам при подходе края того или иного сегмента 6 к трубке 2 привода глобуса последняя частично входит в пазы 21 сегментов, отодвигая подпружиненную заслонку 22. Затем сегменты 6, поворачиваясь вокруг кронштейна 7 и трубки 2 привода, выходят из взаимодействия с трубкой 2 привода, подпружиненные пружиной 25 заслонки 22 закрывают пазы 21, а под действием пружины 36 сегменты 6 поворачиваются на кронштейне 7 в обратную сторону и становится с помощью ограничительных штырей 31 на упоры 30, принимая исходное положение.
После демонстрации непрерывного глобального обзора поверхности Земли зонами обзора пяти спутников, движущихся по своим орбитам, производится измерение с помощью шкалы 37 долгот, указателя 38 и секундомера промежутка времени между двумя последовательными прохождениями любой подспутниковой точки (ее центра)
восходящего узла орбиты, т.е. получают аналог периода обращения спутника на своей орбите, Затем с помощью шкалы 37 долгот, указателя 38 и секундомера определяют
время одного оборота глобуса 1 вокруг своей оси (аналог звездных суток), По измеренным величинам можно определить параметры полета спутников, необходимые для непрерывного глобального обзора
Земли: период обращения и радиус круговой орбиты.
Формула изобретения Действующая модель движения искусственного спутника Земли, содержащая глобус с контурами материков, укрепленный на опорной стойке с возможностью вращения, и электропривод, отличающая- с я тем, что, с целью расширения дидактмческих возможностей путем демонстрации непрерывного глобального обзора поверхности Земли минимальным числом спутников, глобус выполнен из прозрачною материала, внутри него установлено пять сферических
сегментов, окрашенных в разные цвета, имитирующих круговые зоны обзора спутника, сегменты установлены на дугообразных кронштейнах, одни концы которых шарнирно соединены с центрами сегментов, а другие кинематически связаны между собой посредством дифференциального механизма, укрепленного на опорной стойке, содержащей в верхней части сферическую чашку, который выполнен в виде двух ведущих шестерен, жестко установленных на вертикальном валу в подшипниках опорной стойки, с первой из которых, установленной в центре сферической чашки, связаны шестерни приводов поворотных сферических
сегментов, оси которых расположены под углом 44е к горизонтали с углом 72 между собой в плоскости экватора, а с второй - шестерня привода вращения, которая жестко связана с глобусом и установпена с помощью подшипников на трубке привода снаружи стойки, каждый из поворотных сегментов содержит прорези и подпружиненные заслонки для прикрытия прохождения сегментов мимо трубки привода, на глобус
по экватору нанесена шкала долгот, а на опорной стойке установлен ее указатель.
6
Фиг
5 П
Ю
18 &
11
Фиг. 2
М
2$
30
26
Изобретение относится к учебным поср- биям и предназначено для моделирования непрерывного глобального обзора поверхности Земли минимальным числом спутников, находящихся на круговых орбитах одинакового наклонения и радиуса. Модель содержит глобус с контурами материков, укрепленный на опорной стойке с возможностью вращения, и электропривод и отличаются тем, что с целью расширения дидактических возможностей глобус выполнен из прозрачного материала, внутри него установлено пять сферических сегментов, окрашенных в разные цвета, имитирующих круговые зоны обзора спутников. Сегменты установлены на дугообразных кронштейнах, одни концы которых со свободой поворота соединены с центрами сегментов, а другие кииематически связаны между собой посредством дифференциального механизма, укрепленного на опорной стойке, содержащей в верхней части сферическую чашку, который выпол-11 нен в виде двух ведущих шестерен, жестко установленных на вертикальном валу в подшипниках опорной стойки, с первой из жестко установленных на вертикальном валу в подшипниках опорной стойки, с первой из которых, установленной в центре сферической чашки, связаны шестерни приводов поворотных сферических сегментов, оси которых расположены под углом 44й к горизонтали и углом 72 между собой в плоскости экватора, а с второй - шестерня привода вращения, которая жестко связана с глобусом и установлена с помощью подшипников на трубке привода снаружи стойки. Каждый поворотный сегмент содержит прорези и подпружиненные заслонки прикрытия. Для прохождения сегментов мимо трубки привода на глобусе нанесена шкала долгот, а на опорной стойке установлен ее указатель. При включении электропривода глобус и сферические сегменты приходят в движение и имитируют вращение Земли и движение по ней зон обзора спутников. 3 ил. сл с о XI о сл ы
Фие.3
| ДЕЙСТВУЮЩАЯ МОДЕЛЬ ДВИЖЕНИЯ .ИСКУССТВЕИНОГО | 0 |
|
SU255671A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
