Фиг.1
Изобретение относится к неразрушающему контролю электромагнитным методом и может быть использовано для контроля параметров изделий в динамических условиях, например, продольных и поперечных перемещений лопаток ротора и др.
Цель изобретения - повышение информативности за счет увеличения числа контролируемых параметров и точности контроля за счет отстройки результатов контроля от влияния изменения зазора между дополнительными обмотками и объектом контроля.
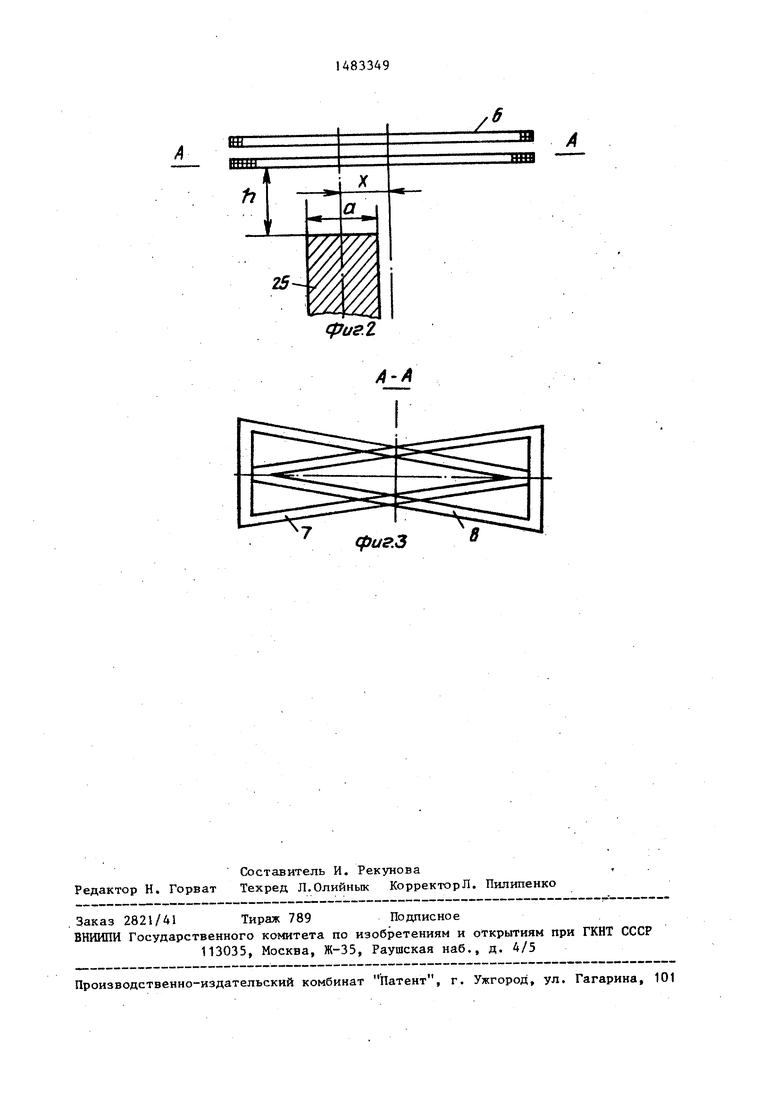
На фиг. 1 изображена структурная схема электромагнитного устройства; на фиг. 2 - объект контроля и обмотки; на фиг. 3 - разрез А-А на фиг. 2.
Электромагнитное устройство для неразрушающего контроля содержит первый колебательный контур 1 с включенным в него вихретоковым преобразователем (полесоздающая обмотка 2), соединенный с первым колебательным кон туром 1 .через резистор 3 второй колебательный контур 4, последовательно соединенные усилитель 5, соединенный с вторым колебательным контуром 4 s и нелинейный четырехполюсник 6, подключенный к первому колебательному контуру 1, первую и вторую дополнительные обмотки 7 и 8, индуктивно связанные с полесоздающей обмоткой 2 преобразователя, последовательно соединенные первый амплитудный детектор 9, первый компенсатор 10, первый масштабный усилитель 11, первый вы- читатель 12, второй масштабный усилитель 13, третий масштабный усилитель 14, второй вычитатель 15, четвертый масштабный усилитель 16, делитель 17 и пятый масштабный усилитель 18,) а также последовательно соединенные второй амплитудный детектор 19, подключенный к первой дополнительной обмотке 7, второй компенсатор 20 и сумматор 21, выход которого подключен к вторым входам первого и второго вычитателей 12 и 15, и последовательно соединенные третий амплитудный детектор 22, подключенный к второй дополнительной обмотке, третий компенсатор 23 и третий вычитатель 24, выход которого подключен к второму входу делителя 17, выходы компенсаторов 20 и 23 подключены соответственно к
0
5
вторым входам третьего вычитателя 24 и сумматора 21, а выходы второго, четвертого и пятого масштабных усилителей 13, 16 и 18 подключены к индикатору (не показан).
Устройство работает следующим образом
Нелинейный четырехполюсник 6, колебательные контуры 1, 4 и резистор 3 образуют цепь положительной обратной связи, охватывающей усилитель 5, Напряжение автоколебаний усилителя 5 поступает в вихретоковый преобразователь (пылесоздающая обмотка 2) первого колебательного контура 1. Напряжение U, с выхода усилителя 5 зависит от расстояния h (фиг. 2) между обмотками 7, 8 и объектом 25 контроля с размером а. При 1/2 а/2 + X, где 1 - длина обмотки 2, X - перемещение контролируемого объекта 25 параллельно плоскости обмотки 2 вихре- токового преобразователя, напряжение U,, можно выразить следующим образом:
и, иЈ
+ К„Ь + К14-а ,
где U01 - начальное напряжение с усилителя 5; К и К,, - чувствительи
VI
ность автогенератора к изменению расстояния h и размера а объекта 25.
В качестве дополнительных катушек 7 и 8 рекомендуется использовать конструкцию в виде двух симметрично размещенных треугольных обмоток (фиг. 3}; которые обеспечивают линейную зависимость изменения напряжения от перемещения X объекта 25.
В этом случае напряжение, снимаемое с обмоток 7 и 8 равно
U, и„, +К,, h+K,,- а+К,
ах
45
U3 U03 +K1} h+K
гз
а+К33 -ах,
где U2, U3 - напряжение соответственно на обмотке 7 и обмотке 8.
Из приведенных выражений следует, что расстояние h между вихретоковым преобразователем и контролируемой поверхностью объекта 25 равно
h KA(U2 + U3 - U, К2)
где К 4 и Кг - постоянные коэффициен- , ты, определяемые из совместного решения приведенных уравнений. Размер а контролируемого объекта 25 равен
а
2 К
(U, + U, - 2 К„, h).
22
Тогда величина перемещения определяется выражением
1
2 К
(U, - UJ
23
Продетектированные детекторами 9, 19 и 22 напряжения подаются на компенсаторы 10, 20 и 23, где компенсируются начальные напряжения Ц
Ц
05
Напряжение с компенсатора
01
подается через масштабный усилитель И с коэффициентом усиления, равным К2, на первый вход вычитателя 12, на второй вход которого подается сумма напряжений U2 + U3 с сумматора 21. Напряжение с вычитателя 12, усиленное масштабным усилителем 13 с коэффициентом усиления, равным К, определяет расстояние h до объекта 25. Напряжение с сумматора 21 подается также на второй вход второго вычитателя 15, на первый вход которого подается напряжение с масштабного усилителя 13, усиленное масштабным усилителем 14 с коэффициентом, равным 2 К . Напря15{Отличающе еся тем, что, с целью повышения информативности и точности контроля, оно снабжено второй дополнительной обмоткой, индуктивно связанной с обмоткой преобразо20 вателя, последовательно соединенными первым компенсатором, подключенным к выходу первого амплитудного детектора, первым масштабным усилителем, первым вычитателем, вторым масштабным усили25 телем, третьим масштабным усилителем, вторым вычитателем, четвертым масштабным усилителем, делителем и пятым масштабным усилителем, последовательно соединенным вторым амплитудным
жение с вычитателя 15, усиленное мае- 30 детектором, подключенным к первой до- штабным усилителем 16 с коэффициентом,полнительной обмотке, вторым компенравным 1/2 К23 , поступает на первый вход делителя 17. Разность напряжений U - U3 , снимаемая с вычитателя 24, подается на второй вход делителя 17, где делится на напряжение, снижаемое с масштабного усилителя 16 и усиленное усилителем 18, определяет величину отклонения Х0
Изобретение позволяет одновременно измерять, перемещение объекта 25 в двух плоскостях и его размер. Формула изобретения
Электромагнитное устройство для неразрушающего контроля, содержащее
сатором и сумматором, выход которого подключен к вторым входам первого и второго вычитателей, и последователь-,g но соединенными третьим амплитудным детектором, подключенным к второй дополнительной обмотке, третьим компенсатором и третьим вычитателем, выход которого подключен к второму вхо40 ДУ делителя, выходы второго и третьего компенсаторов подключены соответственно к вторым входам -третьего вычитателя и сумматора, а выходы второго, четвертого и пятого масштабных
45 усилителей подключены к индикатору.
833496
первый колебательный контур с включенным в него вихретоковым преобразова-, телем, соединенный с первым колебательным контуром через резистор второй колебательный контур, последовательно соединенные усилитель, соединенный с вторым колебательным контуром, и нелинейный четырехполюсник,
Ю подключенный к первому колебательному контуру, соединенный с входом усилителя .амплитудный детектор, индикатор и дополнительную обмотку, индуктивно связанную с обмоткой преобразователя,
15{Отличающе еся тем, что, с целью повышения информативности и точности контроля, оно снабжено второй дополнительной обмоткой, индуктивно связанной с обмоткой преобразо20 вателя, последовательно соединенными первым компенсатором, подключенным к выходу первого амплитудного детектора, первым масштабным усилителем, первым вычитателем, вторым масштабным усили25 телем, третьим масштабным усилителем, вторым вычитателем, четвертым масштабным усилителем, делителем и пятым масштабным усилителем, последовательно соединенным вторым амплитудным
сатором и сумматором, выход которого подключен к вторым входам первого и второго вычитателей, и последовательно соединенными третьим амплитудным детектором, подключенным к второй дополнительной обмотке, третьим компенсатором и третьим вычитателем, выход которого подключен к второму вхоДУ делителя, выходы второго и третьего компенсаторов подключены соответственно к вторым входам -третьего вычитателя и сумматора, а выходы второго, четвертого и пятого масштабных
усилителей подключены к индикатору.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2066646C1 |
| Вихретоковое устройство для неразрушающего контроля с температурной компенсацией | 1987 |
|
SU1490615A1 |
| Электромагнитное устройство неразрушающего контроля | 1988 |
|
SU1566279A2 |
| Вихретоковое устройство неразрушающего контроля | 1988 |
|
SU1522086A1 |
| Измеритель линейных перемещений | 2015 |
|
RU2624844C2 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП | 1992 |
|
RU2020470C1 |
| Устройство контроля качества точечной сварки | 1984 |
|
SU1226267A1 |
| ВИХРЕТОКОВОЕ УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 1996 |
|
RU2111482C1 |
| Устройство для вихретокового контроля | 1986 |
|
SU1379715A1 |
| Способ вихретокового контроля осевых перемещений валов и устройство для его осуществления | 1990 |
|
SU1753251A1 |
Изобретение относится к неразрушающему контролю электромагнитным методом. Цель изобретения - повышение информативности и точности контроля. Устройство позволяет определить параметры контроля из следующих соотношений: H = K1 U2+U3-U1K2)
A=1/2 K22 X (U2+U3-2K21 X H) и X = 1/2 K23 X A (U2 - U3) , где H,A и X - соответственно расстояние между обмотками 7,8 и объектом контроля, размер объекта контроля и смещение контролируемого объекта параллельно плоскости обмотки 2 вихретокового преобразователя
U1,U2,U3, - соответственно напряжния с выхода усилителя 5 и обмоток 7 и 8
K1,K2,K21,K22,K23 - постоянные коэффициенты. Указанный алгоритм реализуется с помощью компенсаторов 10, 20, 23, вычитателей 12, 15, 24, сумматора 21, делителя 17 и пяти масштабных усилителей 11,13,14,16 и 18. 3 ил.
фиг.1
фи.3
| Электромагнитное устройство неразрушающего контроля | 1984 |
|
SU1226270A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
