: | со
:л
Изобретение относится к контрольно-измерительной технике и может быть использовано для решения задач неразрушающего контроля методом вихревых токов, в частности для измерения расстояний до электропроводящих поверхностей и контроля физико-механических свойств электропроводящих изделий.
Целью изобретения является повы- шение точности измерений за счет снижения приборной погрешности, повьппе- ние быстродействия и расширение области применения за счет появления возможности определения магнитных характеристик материалов.
На чертеже представлена блок-схема устройства для вихретокового контроля .
Устройство для вихретокового кон- троля содержит управляемый по частоте и амплитуде генератор 1, трансформа- .тор 2, последовательно соединенные вихретоковый преобразователь 3, первый буферный усилитель 4, первый ам- плитудный детектор 5, коммутатор 6, аналого-цифровой преобразователь 7, микропроцессор 8 и индикатор 9, причем второй и третий выходы микропроцессора 8 подсоединены к управляющим входам генератора 1 и коммутатора 6 соответственно, а также последовательно соединенные управляемый делитель 10 напряжения, сумматор 11, второй вход которого соединен с выходом буферного усилителя А, и второй ампли- тудньй детектор 12, выход которого подключен к второму входу коммутатора 6. Управляюпщй делитель 10 состоит из последовательно соединенных второго буферного усилителя 13, вход которого, являющийся первым входом управляемого делителя 10, подключен к вторичной обмйтке трансформатора 2, ре- зистивного делителя 14, в одно из плеч которого включен резисторный оп- трон 15, третьего амплитудного детектора 16 и пропорционально-интегрирующего регулятора 17, управляющий вход которого является управляющим входом управляемого делителя 10 напряжения и подключен к выходу первого амплитудного детектора 5, а выход пропорционально-интегрирующего регулятора 17 подключен к управляющему входу оптрона 15, Выходом управляемого де- лителя 10 является вход третьего амплитудного детектора 16, Первичная обмотка трансформатора 2 включена
между выходом генератора 1 и входом преобразователя 3.
Устройство для вихретокового контроля работает следующим образом.
Управляемый микропроцессором 8 по частоте и амплитуде выходного сигнала генератор 1,запитывает вихретоковый преобразователь 3. Выбор частоты и амплитуды тока возбуждения определяется оператором в соответствии с решаемой задачей.
Сигнал с измерительной обмотки вихретокового преобразователя 3 поступает на вход первого буферного услителя 4, где усиливается и подается на входы первого амплитудного детектора 5 и сумматора 11, где векторно суммируется с некоторым сигналом (Ад), поступающим с выхода управляемого делителя 10 напряжения, входным сигналом для которого является напряжение на вторичной обмотке трансформатора 2. Управляющим сигналом для делителя 10 напряжения является выходное напряжение первого амплитудного детектора 5.
Сигнал, пропорциональный модулю вектора, вносимого в вихретоковый преобразователь 3 напряжения (А ), снимаемый с выхода первого амплитудного детектора 5, и сигнал, пропорциональный модулю векторной суммы (AJ), формируемый на выходе второго амплитудного детектора 12, поочередно с помощью управляемого микропроцессором 8 коммутатора 6 подаются на вход аналого-цифрового преобразователя 7, преобразуются в двоичный код и выводятся в микропроцессор 8, где обрабатываются в соответствии с заданной программой контроля. Результат обработки выводится на индика- - тор 9.
Рассмотрим работу устройства на примере двухпараметрового контроля - одночастотного измерения расстояния до электропроводящей немагнитной поверхности (h) и измерения удельной электрической проводимости (б).
Анализ сигналов накладного вихретокового преобразователя, расположенного над проводящим полупространством, показывает, что
Ь,(А,„, Ag coscf); ( , A coscf).
(1) (2)
где (f - фаза вносимого напряжения относительно вектора опорного напряжения, который ортогонален вектору тока возбуждения. Таким образом, зная А ц и , по соотношениям (1) и (2) можно определить h и G . При этом величину Ар„ cos ц получают следующим образом.
Осуществляя съем информации с обоих детекторов 5,12, микропроцессор 8 сначала опрашивает первый амплитудный детектор 5, сигнал на выходе которого пропорционален Ag . Управляемый делитель 10 напряжения вьфабатывает опорный сигнал, амплитуда которого равна амплитуде выходного напряжения первого буферного усилителя 4. На вход управляемого делителя 10 подается сигнал с вторичной обмотки трансформатора 2, которьй усиливается вторым усилителем 13 и подается на резистивный делитель 14. На выходе третьего амплитудного детектора 16 формируется напряжение, величина которого равна амплитуде сигнала на выходе делителя 14. Оно подается на второй вход пропорционально-интегрирующего регулятора 17, на другой вход которого подается вы- ходной сигнал с первого амплитудного детектора 5. На выходе регулятора 17 появляется сигнал управления оптро- ном 15, изменяющим сопротивления одного из плеч делителя 14 до тех пор, пока входные напряжения регулятора 17 не сравняются. При этом амплитуда сигнала на входе амплитудного детектора 16 равна амплитуде сигнала на входе амплитудного детектора 5.
Выбирая коэффициенты передач обоих плеч векторного сумматора 11 одинаковыми, получаем на его выходе векторную сумму двух одинаковых по модулю напряжений, т.е. Л А,,А,(3) . Выходной сигнал сумматора 11 детектируется вторым амплитудным детектором 12 и также вводится в микропроцессор 8. Введенные величины (А и А) подвергаются обработке в соответствии с нижеследующим алгоритмом. С Учетом (3) и теоремы косинусов можно записат
А 2A -2Acos ,
но Acoscf и является искомой величиной. Следовательно
Асов cf А AL 2А
Таким образом, обработав совместно вводимую информащпо в соответствии с (1), (2) и (4), можно определит искомые величины h и СЗ . Так как предлагаемое устройство не гарантирует ортогональность вектора А, вектору тока возбуждения, то в более общем случае необходимо рассматривать уравнения
h f, (А, Acos(tf+ucf)); (5) С - fjCA, Acos(if + utf)), (6)
где uCf-угол между вектором А, и вектором, строго ортогональным вектору тока возбуждения.
Для использования (5) и (6) необходимо знать 6( . Находят &(р с помощью микропроцессора 8 решением системы уравнений, например, для h, задавая некоторые калибровочные величины зазоров h, hj
h, f,(A,, A,cos(cf,+uq)),h f (A,, A,,cos(q),+&(f)),
д J5 2025 ,Q
ь
40
55
что разрещимо относительно uCf .
Предлагаемое устройство обладает более высоким быстродействием данной схемы, так как вектор опорного напряжения в любой момент по модулю равен вектору вносимого напряжения и нет необходимости в участии микропроцессора 8 в работе управляемого делителя 10 напряжения, что значительно сокращает время, необходимое для одного измерения, и позволяет вести контроль при быстро изменяющихся параметрах объекта контроля (например, контроль в потоке).
Кроме того, благодаря введению в схему трансформатора 2 появляется возможность определения знака угла фазы вносимого напряжения относительно вектора тока возбуждения, т.е. можно определять магнитные свойства материала.
При стремлении cf к О , что имеет место на практике, Aj. уменьшается. Это приводит к тому, что при преобра- зовднии напряжения, пропор1щонального А в цифровой код допускают значительные ошибки в определении о , так как для расчета G можно воспользоваться приближенной формулой
G ktg (90 -cf),
где k - некоторая функция зазора.
Значение tg(90 -Cf) при малых Cf на- ходят приближенно из формулы
tg(90 -if)« . z
Например, аналого-цифровой преобразователь работает с погрешностью ±3 единиць. Если , а А 100 и
G k -
А
г
мы получаем относительную погрешность, достигающую 7%, что недопустимо. Но благодаря тому, что вектор опорного сигнала А ортогонален вектору тока возбуждения и , имеется возмож- ность за счет увеличения коэффициен тов передачи амплитудных детекторов 5,12 или коэффициента передачи сумматора 11 растянуть А на всю шкалу аналого-цифрового преобразователя 7. При зтом относительная погрешность уменьшается до 1,2%. Таким образом, предлагаемое устройство для вихрето- кового контроля позволяет повысить точность и стабильность измерений, уменьшить время измерения и расширить область применения.
Формула изобретения
Устройство для вихретоковбго контроля, содержащее управляемый по частоте и амплитуде генератор, последовательно соединенные вихретоковый преобразователь, буферный усилитель,
с
с
5
0 5 о
5
д
первый а1чплитудный детектор, коммутатор, аналого-цифровой преобразователь, микропроцессор, второй и третий выходы которого подключены соответственно к входу генератора и второму входу коммутатора, и индикатор, и последовательно соединенные управляемый делитель напряжения, сумматор, второй вход которого соединен с выходом буферного усилителя, и второй амплитудный детектор, выход которого подключен к третьему входу коммутатора, отличающееся тем, что, с целью повышения точности измерений, быстродействия и расширения области применения, оно снабжено трансформатором, первичная обмотка которого включена между выходом управляемого генератора и входом вихре- токового преобразователя, а его вторичная обмотка подключена к первому входу управляемого делителя напряжения, который выполнен в виде последовательно соединенных второго буферного усилителя, вход которого является первым входом управляемого делителя напряжения, резистивного делителя, в одно из плеч которого включен резистивный оптрон, а выход резистивного делителя является выходом управляемого делителя напряжения, третьего амплитудного детектора, и пропорционально - интегрирующего регулятора, второй вход которого подключен к выходу первого амплитудного детектора и является вторым входом управляемого делителя напряжения, а его выход подключен к управляющему входу оптрона.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вихретокового контроля | 1984 |
|
SU1224704A1 |
| Устройство для ультразвуковогоизМЕРЕНия КОНцЕНТРАции КОМпОНЕНТОВВ СлОжНыХ пОлиМЕРНыХ КОМпОзицияХ | 1979 |
|
SU815618A1 |
| Электромагнитный многочастотный структуроскоп | 1983 |
|
SU1100558A1 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП | 1995 |
|
RU2085932C1 |
| ЭЛЕКТРОМАГНИТНЫЙ МНОГОЧАСТОТНЫЙ СТРУКТУРОСКОП | 1999 |
|
RU2179312C2 |
| Устройство контроля качества точечной сварки | 1984 |
|
SU1226267A1 |
| Фазометр | 1985 |
|
SU1298685A1 |
| Устройство для измерения удельной электрической проводимости | 1982 |
|
SU1472845A1 |
| Устройство для вихретокового контроля | 1985 |
|
SU1260834A1 |
| Устройство для вихретокового контроля | 1985 |
|
SU1330541A1 |
Изобретение относится к области контрольно-измерительной техники и может быть использовано для контроля качества электропроводных изделий, в частности контроля расстояния до электропроводящих поверхностей, контроля качества сплавов по их удельной электропроводности. Целью предлагаемого изобретения является повьшение точности измерений, повышение быстродействия, расширение области применения за счет появления возможности определения магнитных характеристик материалов. Принцип работы устройства для вихретокового контроля заключается в том, что сигнал с измерительной обмотки вихретокового преобразователя 3 суммируется с некоторым опорным сигналом. Сигнал, пропорциональный модулю вектора, вносимого в преобразователь напряжения, и сигнал, пропорциональный модулю векторной суммы, поочередно подаются на вход аналого-цифрового преобразователя 7 и вводятся в микропроцессор 8, где обрабатываются в соответствии с заданной программой контроля. 1 ил. $ сл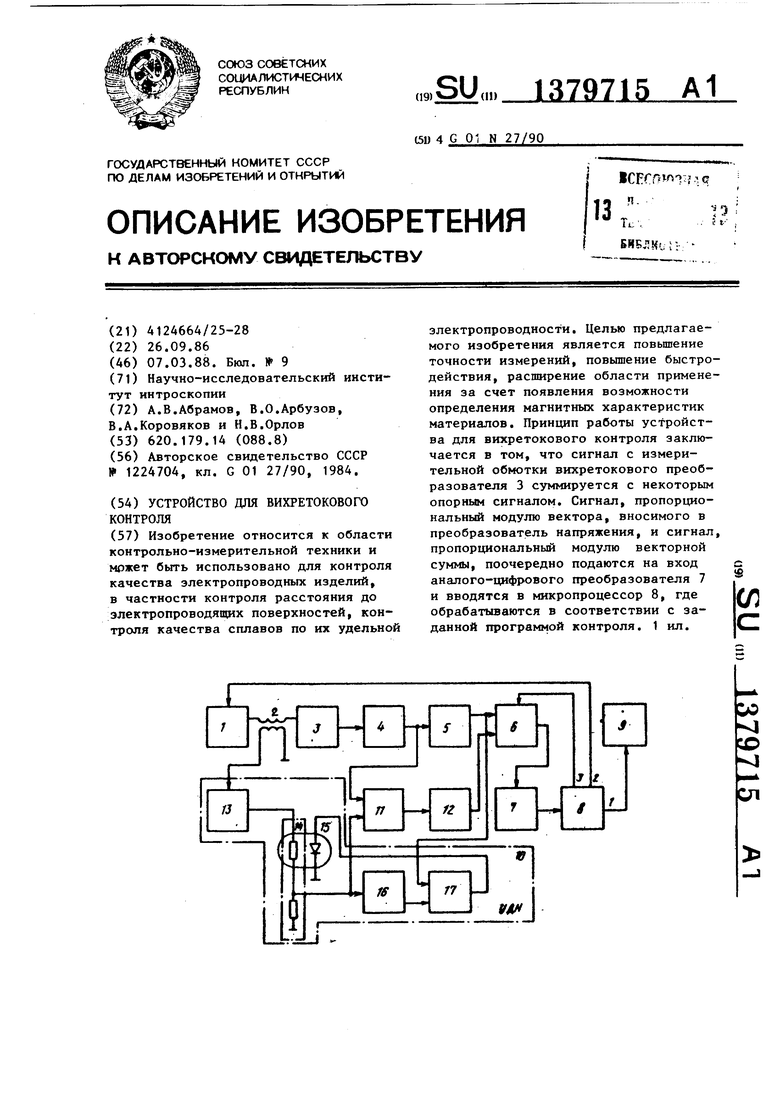
| Устройство для вихретокового контроля | 1984 |
|
SU1224704A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
