1
(21)4244382/24-28
(22)14.05.87
(46) 30.06.89. БЮП. 24
(71)Ленинградский институт точной механики и оптики
(72)М.А. Великотный, В.И.Поляков и Ю.В.Борщев
(53)535.825.23(088.8)
(56)Авторское свидетельство СССР 1155849, кл. G 01 В 15/00, 1985.
(54)УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЗОНЫ С НЕРАВНОМЕРНОЙ ОСВЕ- ЦЕННОСТЬЮ.
(57)Изобретение относится к измерительной технике и может быть использовано для бесконтактного определения положения объектов. Цель изобретения - повьшение быстродействия - достигается за счет уменьшения времени обработки видеосигнала путем одновременного со сканированием объекта блоком фоточувствительных
элементов сравнения текущего значения видеосигнала с его максимальным значением, полученным в предыдущем цикле сканирования. Видеосигнал, формируемый при сканировании блока 1 фоточувствительных элементов, интегрируется интегратором 3. Результат интегрирования поступает на схему 5 сравнения .и схему 4 выборки-хранения, где он запоминается. На второй вход схемы 5 сравнения из схемы 4 выборки-хранения поступает с коэффициентом пропорциональности К., определяемым делителем 9, максимальное значение интеграла, полученное на предыдущем шаге; при совпадении сигналов вырабатывается импульс, управляющий блоком 7 счета, который преобразует результат измерения в двоичное число. Регистрация сигнала осуществляется с помощью блока 8 выходного регистра. 2 ил.
§
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель координаты энергетического центра зоны с неравномерной освещенностью | 1987 |
|
SU1453174A1 |
| Способ определения положения зоны с неравномерной освещенностью и устройство для его осуществления | 1983 |
|
SU1155849A1 |
| Устройство для определения положения зоны с неравномерной освещенностью | 1990 |
|
SU1795276A1 |
| Способ определения положения зоны с неравномерной освещенностью и устройство для его осуществления | 1987 |
|
SU1516785A1 |
| Способ определения зоны с неравномерной освещенностью и устройство для его осуществления | 1986 |
|
SU1506272A1 |
| Устройство для определения положения зоны с неравномерной освещенностью | 1984 |
|
SU1226061A1 |
| Устройство для измерения рассогласования между углом и кодом | 1987 |
|
SU1411973A1 |
| Способ измерения рассогласования между углами поворота,один из которых задан кодом | 1985 |
|
SU1285595A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Устройство для контроля качества объективов | 1983 |
|
SU1141300A1 |
Изобретение относится к измерительной технике и может быть использовано для бесконтактного определения положения объектов. Цель изобретения - повышение быстродействия - достигается за счет уменьшения времени обработки видеосигнала путем одновременного со сканированием объекта блоком фоточувствительных элементов сравнения текущего значения видеосигнала с его максимальным значением, полученным в предыдущем цикле сканирования. Видеосигнал, формируемый при сканировании блока 1 фоточувствительных элементов, интегрируется интегратором 3. Результат интегрирования поступает на схему 5 сравнения и схему 4 выборки-хранения, где он запоминается. На второй вход схемы 5 сравнения из схемы 4 выборки-хранения поступает с коэффициентом пропорциональности Кд, определяемым делителем 9, максимальное значение интеграла, полученное на предыдущем шаге
при совпадении сигналов вырабатывается импульс, управляющий блоком 7 счета, который преобразует результат измерения в двоичное число. Регистрация сигнала осуществляется с помощью блока 8 выходного регистра. 2 ил.
4ai СО О СО
Изобретение относится к измерительной технике и может быть использовано для бесконтактного определения положения объектов.
Цель изобретения - повышение быстродействия - достигается за счет того, что в течение скаиирования блоков фоточувствительных элементов производится одновременное сравнение текущего значения интеграла видеосигнала с его максимальным значением, полученным в предыдущем цикле сканирования.
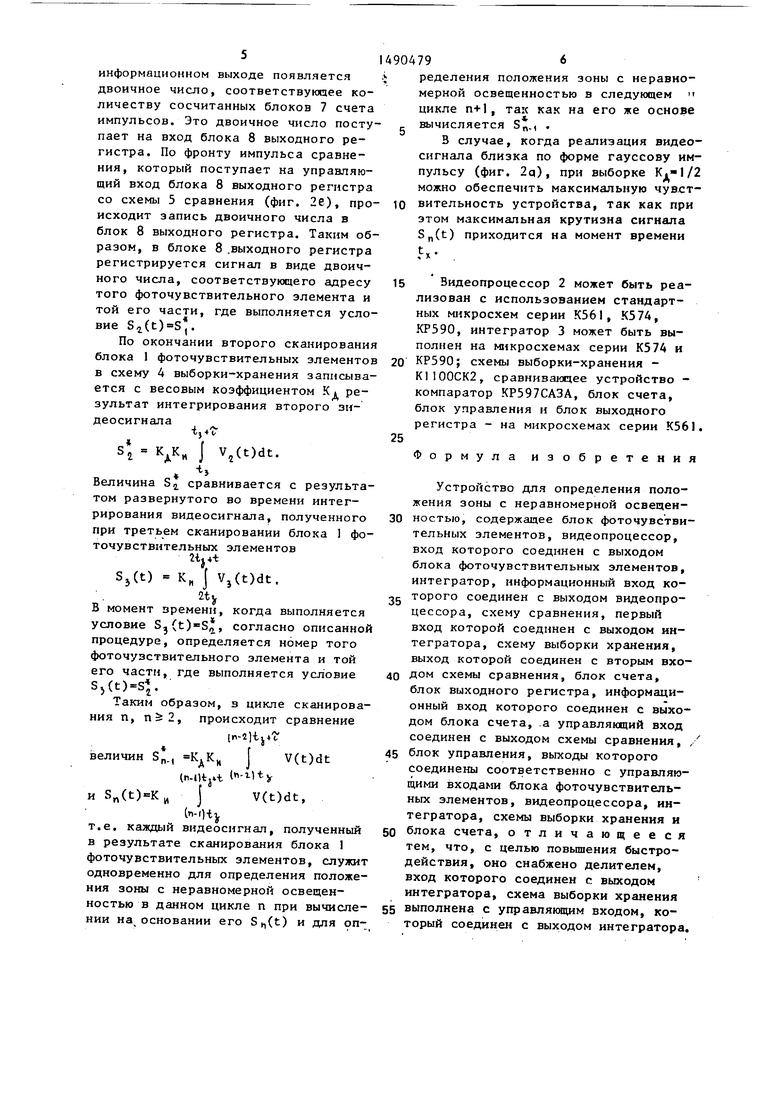
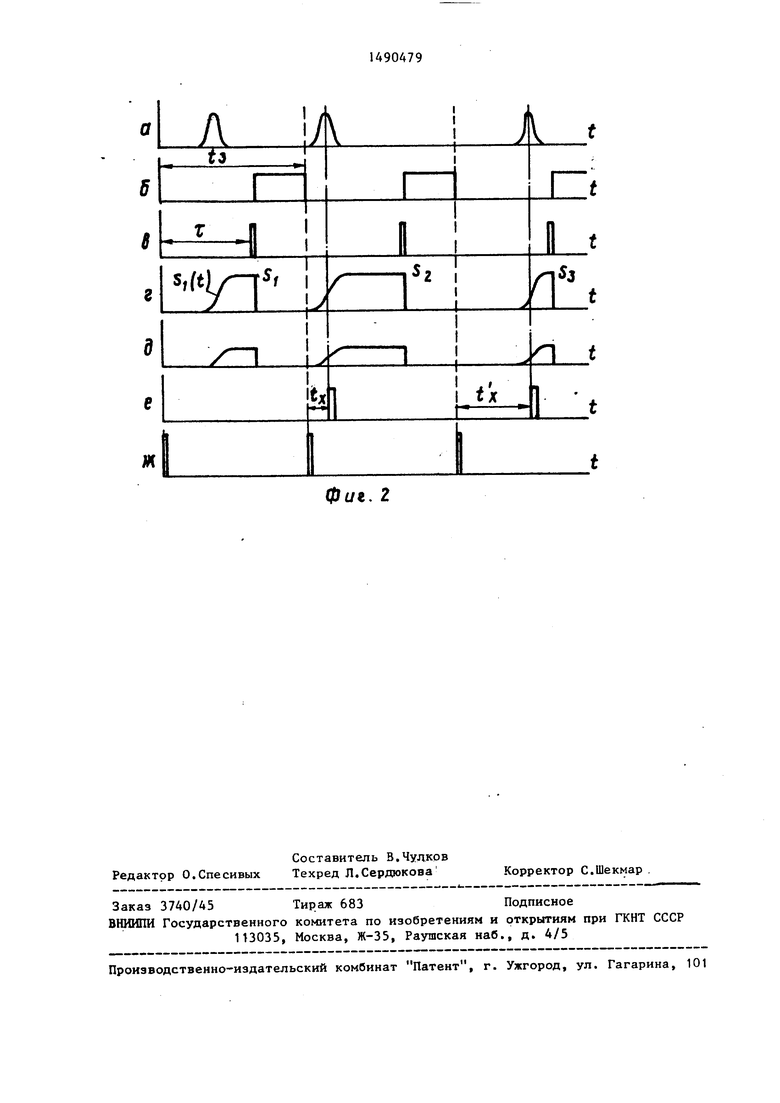
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - эпюры напряжений в соответствующих точках блок- схемы .
Устройство содержит блок 1 фоточувствительных элементов, видеопроцессор 2, интегратор 3, схему 4 выборки-хранения, схему 5 сравнения, блок 6 управления, блок 7 счета, блок 8 выходного регистра и делитель 9. Блок 1 фоточувствительных элементов соединен с видеопроцессором 2. Вход видеопроцессора 2 подключен к входу интегратора 3. Выход интегратора 3 соединен с первым входом схемы 5 сравнения и входом делителя 9. Выход делителя 9 подключен к входу схемы 4 выборки-хранения, выход которой соединен с вторым входом схе- 5 сравнения. Выход схемы 5 сравнения соединен с управляющим входом блока 8 выходного регистра. Информационный вход блока 8 выходного регистра соединен с информационным выходом блока 7 счета. Блок 6 связан с управляюдими входами блока 1 фоточувствительных элементов, видеопроцессором 2, интегратором 3, схемой 4 выборки-хранения, блоком 7 счета.
Устройство работает следующим образом.
Квантованный по времени видеосигнал с выхода блока 1 фоточувствительных элементов, в качестве которого используется линейный формирователь изображения на основе прибора с зарядовой связью, поступает на вход видеопроцессора 2. Видеопроцессор 2 Осуществляет преобразование видеосигнала и выделение измерительной информации, заключающееся в устранении помех, обусловленных влиянием тактовых и сбросовых импульсов, с помощью двойной коррелированной выборки.
Видеосигнал, формируемый при первом сканировании блока 1 фоточувствительных элементов (фиг. 2а , сигнал I), интегрируется интегратором 3. Результат интегрирования (фиг. 2)
V
S, K,j V(t)dt,
0
0
где Kj, - коэффициент передачи интегратора 3; V(t) - выходной сигнал видеопроцессора 2; - время сканирования блока 1 фоточувствительных элементов, поступает на вход дели5 теля 9 с коэффициентом передачи К«.
j
Сигнал с выхода делителя (фиг. 2д) поступает на вход схемы выборки-хранения. Во время действия импульса управления из блока 6 управления (фиг. 2в) результат интегрирования запоминается. После окончания записи ВЫХОДНС1Й сигнал интегратора принимает нулевое значение при воздействии на его управляющий вход импульса управления блока 6 управления (фиг. 25).
Задержка видеосигнала осуществляется за счет повторного сканирования блока 1 фоточувствительных элементов 0 и использования полученного видео- йигнапа в качестве задержанного. При вторичном сканировании линейной ц епочки фоточувствительных элементов 1 видеосигнала с выхода видеопроцессора 2 (фиг, 2о, сигнал II) поступает на вход интегратора 3, а
с его выхода в виде
V(t)dt,
5
5
S(t)
0
Ки I Ьэ
5
0
5
(фиг. 2i) - на один вход схемы 5 сравнения. На другой вход схемы 5 сравнения поступает выходной сигнал схемы 4 выборки-хранения S,. Через время t после начала второго сканирования блока 1 фоточувствительных элементов, когда результат развернутого во времени интегрирования S(t) становится равным S, на выходе схемы 5 сравнения появляется импульс сравнения (фиг. 2 ).
В начале каждого сканирования блока 1 фоточувствительных элементов на блок 7 счета поступает управляющий сигнал (фиг. ), который устанавливает счетчик на нулевое значение. После окончания этого сигнала блок 7 счета начинает считать вырабатываемые в нем импульсы и на его
информационном выходе появляется двоичное число, соответствуюаее количеству сосчитанных блоков 7 счета импульсов. Это двоичное число поступает на вход блока 8 выходного регистра. По фронту импульса сравнения, который поступает на управляющий вход блока 8 выходного регистра со схемы 5 сравнения (фиг. 26), происходит запись двоичного числа в блок 8 выходного регистра. Таким образом, в блоке 8 .выходного регистра регистрируется сигнал в виде двоичного числа, соответствующего адресу того фоточувствительного элемента и той его части, где выполняется условие Si(t) S.
По окончании второго сканирования блока 1 фоточувствительных элементов в схему 4 выборки-хранения записывается с весовым коэффициентом Кд результат интегрирования второго видеосигнала
Л
V2(t)dt.
Величина 82. сравнивается с результатом развернутого во времени рирования видеосигнала, полученного при третьем сканировании блока 1 фоточувствительных элементов
S,(t)
2ij4-t
К„ j V,(t)dt.
2ty
В момент времени, когда выполняется условие Sj(t)S, согласно описанной процедуре, определяется номер того фоточузствительного элемента и той его части, где выполняется условие Sj(t)s|.
Таким образом, в цикле сканирования п, п52, происходит сравнение
ln-2lij+ i
J V(t)dt (n.l) («-il-tv И S(t)K, J V(t)dt,
(n-Oiv т.е. каждый видеосигнал, полученный
в результате сканирования блока 1 фоточувствительных элементов, служит одновременно для определения положения зоны с неравномерной освещенностью в данном цикле п при вычислении на основании его S,(t) и для опвеличин 5„., К.Кц
ределения положения зоны с неравномерной освещенностью в следующем цикле п+1, так как на его же основе вычисляется S., .
В случае, когда реализация видеосигнала близка по форме гауссову импульсу (фиг. 2q), при выборке можно обеспечить максимальную чувствительность устройства, так как при этом максимальная крутизна сигнала S(t) приходится на момент времени
ь- .
Видеопроцессор 2 может быть реализован с использованием стандартных микросхем серии К561, К574, КР590, интегратор 3 может быть выполнен на микросхемах серии К574 и КР590; схемы выборки-хранения - К1100СК2, сравнивающее устройство - компаратор КР597САЗА, блок счета, блок управления и блок выходного регистра - на микросхемах серии К561.
Формула изобретения
Устройство для определения положения зоны с неравномерной освещен
ностью, содержащее блок фоточувствительных элементов, видеопроцессор, вход которого соединен с выходом блока фоточувствительных элементов, интегратор, информационный вход которого соединен с выходом видеопроцессора, схему сравнения, первый вход которой соединен с выходом интегратора, схему выборки хранения, выход которой соединен с вторым входом схемы сравнения, блок счета, блок выходного регистра, информационный вход которого соединен с выходом блока счета, -а управляющий вход соединен с выходом схемы сравнения, , блок управления, выходы которого
соединены соответственно с управляющими входами блока фоточувствительных элементов, видеопроцессора, интегратора, схемы выборки хранения и блока счета, отличающееся
тем, что, с целью повьппения быстродействия, оно снабжено делителем, вход которого соединен с выходом интегратора, схема выборки хранения 55 выполнена с ущзявляющим входом, который соединен с выходом интегратора.
. 2
