| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КЕРНОВ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2020 |
|
RU2747741C1 |
| ЯМР СПЕКТРОСКОПИЯ С ИСПОЛЬЗОВАНИЕМ СРЕДСТВА ЯМР С ГРАДИЕНТНЫМ ПОЛЕМ | 2003 |
|
RU2251097C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СКАНИРОВАНИЯ И ЛОКАЛЬНОГО ВОЗДЕЙСТВИЯ НА ИССЛЕДУЕМУЮ ОБЛАСТЬ В БИОЛОГИЧЕСКИХ ОБЪЕКТАХ | 2007 |
|
RU2353922C1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2016 |
|
RU2645909C1 |
| Способ измерения распределения постоянного магнитного поля в ЯМР-томографе | 1989 |
|
SU1712845A1 |
| СПОСОБ ПОЛУЧЕНИЯ ЯКР-ИЗОБРАЖЕНИЯ | 1993 |
|
RU2094785C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА МНОГОФАЗНОГО ФЛЮИДА ПРИ ПОМОЩИ РЕГИСТРАЦИИ СИГНАЛА ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА (ЯМР) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427828C1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2018 |
|
RU2679630C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РЧ ПЕРЕДАЮЩЕЙ ЦЕПИ | 2011 |
|
RU2574312C2 |
| Способ магнитно-резонансной интроскопии | 1986 |
|
SU1436039A1 |
Изобретение относится к измерительной технике. Целью изобретения является повышение производительности измерений за счет исключения сканирования по третьей координате путем автоматического удержания чувствительной точки на исследуемой поверхности. Принцип действия устройства основан на методе чувствительной точки. Емкость 10, заполненная жидкостью 9, содержащей ядра, обладающие магнитным моментом (напр., водой), в которую погружен исследуемый объект 16, помещается в зону измерений и подвергается воздействию магнитного поля, представляющего собой суперпозицию в зоне измерений постоянного однородного поля, создаваемого магнитной системой 1, неоднородного поля низкой частоты, создаваемого тремя парами градиентных катушек 2 и 3, 4 и 5, 6 и 7, и поля радиочастотной катушки 8 с частотой ядерного магнитного резонанса (ЯМР) ядер жидкости. В результате синхронного детектирования сигнала ЯМР на частоте, соответствующей значению магнитной индукции в чувствительной точке, постоянная составляющая выходного сигнала содержит лишь вклад от ядер, расположенных в области чувствительной точки. Следовательно, по любой из координат, например X, поле зависит от времени при всех X, кроме X = Хо, соответствующей чувствительной точке. Вклад в сигнал ЯМР дадут те ядра, которые находятся в слое толщиной ΔХ вблизи плоскости X=Хо. Положение чувствительной плоскости определяется соотношением токов в соответствующей паре градиентных катушек 2 ...7. Сигнал свободной ядерной индукции с радиочастотной катушки через блок 12 согласования и защиты поступает в приемный блок 13. Положение третьей чувствительной плоскости зависит от сигнала управления, поступающего с выхода приемного блока 13 на блок 14 управления переменным градиентом, таким образом осуществляется обратная связь, с помощью которой чувствительная точка удерживается на исследуемой поверхности, что позволяет избежать сканирования по третьей координате и сократить тем самым время измерения. 2 ил.
4ib О
О 00
верхности. Принцип дейстзил устройства.основан на методе чувствительной точки. Емкость 10, заполненная жидкостью 9, содержащей ядра, обла- дакхцие магнитным моментом (напр., водой), в которую погружен исследуемый объект 16, помещается в зону измерений и подвергается воздействию магнитного поля, представляющего собой суперпозицию в зоне измерений постоянного однородного ПОЛЯ, создаваемого магнитной системой 1, неоднородного поля низкой частоты, создаваемого тремя парами градиентных катушек 2иЗ, 4и5, 6и7,и поля радиочастотной катуики 8 с частотой ядерного магнитного резонанса (ЯМР) ядер жидкости. В результате синхронного детектирования сигнала 5ШР на частоте, соответствующей значению магнитной индукции в чувствительной точке, постоянная состаапжощая выходного сигнала содержит лишь вклад от ядер, расположенных в области чувствительной точки. Следовательно
Изобретение относится к области измерительной техники и может быть использовано для определения профиля внешней и внутренней поверхности немагнитных объектов.
Целью изобретения является повы- иение производительности за счет ис- юпочепия сканирования по третьей координате путем автоматического удержания чувствительной точки на исследуемой поверхности.
На фиг. 1 представлена функциональная схема устройства; на фиг. 2- временные диаграммы изменения градиентов магнитного поля.
Устройство содержит магнитную систему 1, являющуюся источником постоянного однородного магнитного ПОЛЯ, три пары градиентных катушек 2 и 3, 4 и 5, 6 и 7, оси которых взаимно перпендикулярны, являющиеся источником неоднородного магнитного поля низкой частоты, радиочастотную катушку 8, помещенную в зону суперпозиции полей магнитной системы I и градиентных катущек 2,...7, жидкость 9, содержащую ядра, обладающи магнитным моментом, емкость 10, заполненную жидкостью 9 и установленпо любой из координат, например X, поле зависит от времени при всех X, кроме , соответствующей чувствительной точке. Вклад в сигнал ЯМР дадут те ядра, которые находятся в слое толщиной ДХ вблизи плоскости . Положение чувствительной плоскости определяется соотношением токов в соответствующей паре градиентных катушек 2...7. Сигнал свободной ядерной индукции с радиочастотной катушки через блок 12 согласования и защиты поступает в приемный блок
и сократить тем саьым время измерения. 2 ил.
5
ыую внутри радиочастотной катуики 8, генератор 11 радиочастотных импульсов, выход которого соединен с радиочастотной катушкой 8, соединенные последовательно с радиочастотной катушкой 8 блок 12 согласования и защиты, приемный блок 13 и блок 14 управления переменным градиентом, первый выход которого соед11нен с
д входами градиентных катушек 2,...7, и регистрируюшдп блок 15, вход которого соединен с вторым выходом блока 14 управления.
Принцип действия устройства осно5 ван на методе чувствительной точки, суть которого заключается в том, что весь исследуемый объем за исключением одного малого его элемента - чувствительной точки - подвергается
Q действию беременного магнитного поля низкой (звуковой) частоты. В этих условиях производится синхронное де- текти.рование сигнала ядерного маг- митиого резонанса (ЯМР) на частоте QO соответству1эщей значению поля Е 3 чувствительной точке. Постоянная составляющая выходного сигнала содержит лишь вклад от ядер, расположенных в области чувствительной точки, поскольку спектр ЯМР от остальной части исследуемого объема оказывается модулированным по частоте. Этот метод реализуется на практике при помощи трех переменных во времени градиентов магнитного полл, направления которых взаимно ортогональны, а величина осциллирует с различными частотами. Если градиент, например, по координате X, G,(t) имеет вид
G,(t) G,sinJ2,t. (1) где Q, - частота осцилляцг{и, то магнитное поле в исследуемом -объеме меняется по закону
Bp(X,t) (X-X,)G,sinS2,t. (2)
Из соотношения (2) видно, что поле Вд(Х,С) зависит от времени при всех X, кроме (,. Вютад в наблюдаемый сигнал ЯМР дадут те ядра, которые находятся в слое толщиной Х вблиз плоскости, проходящей через Хр, перпендикулярно оси X. На практике осциллирующий градиент создают парой соосных катуиек, питаемых переменным током, магнитные поля которых направлены навстречу друг другу. Положение чувствительной плоскости определяется при этом соотношением токов в этих катушках.
Устройство для определения профиля поверхности немагнитных объектов работает следующим образом (см. Фиг. 1).
Измеряемый объект 16 помещается в емкость 10, которая является зоной измерения, заполненную жидкостью 9, содержащей ядра, обладающие магнитным моментом, предпочтительно прото- носодержащей, например, водой. Магнитная система создает в зоне измерения постоянное однородное магнитное поле, вызывающее поляризацию
ядер жидкости 9. Одновременно с этим 45 °яз приемного блока 13 точка двизона измерения подвергается воздействию переменного неоднородного магнитного поля, характеризующегося градиентами в трех взаимно перпендикулярных направлениях, причем частоты изменения каждого градиента должны быть различными. Переменное неоднородное магнитное поле создается тремя парами градиентных катущек 2 иЗ, 4и5,6и7. Токи, вызывающие указанные градиенты, создаются блоком 14 управления переменным градиентом, который создает переменные токи в каждой паре градиентных катушек2иЗ, 4и5,6и7, различающиеся по амплитуде и находящиеся в противофазе. Соотноиение амплитуд токов в каждой паре катушек определяет положения чувствительной плоскости; пересечение чувствительных плоскостей, создаваемых каждой парой чувствительных катуиек, определяет
положение чувствительной точки. С помощью первой пары катущек 2 и 3 выделяется чувствительная плоскость, перпендикулярная одной из.осей, на- npntiep, Z; аналогично с помощью второй пары катушек 4 и 5 выделяется плоскость, перпендикулярная оси Y; пересечение двух этих плоскостей дает чувствительную линию, параллельную оси X. И, наконец, с помощью третьей
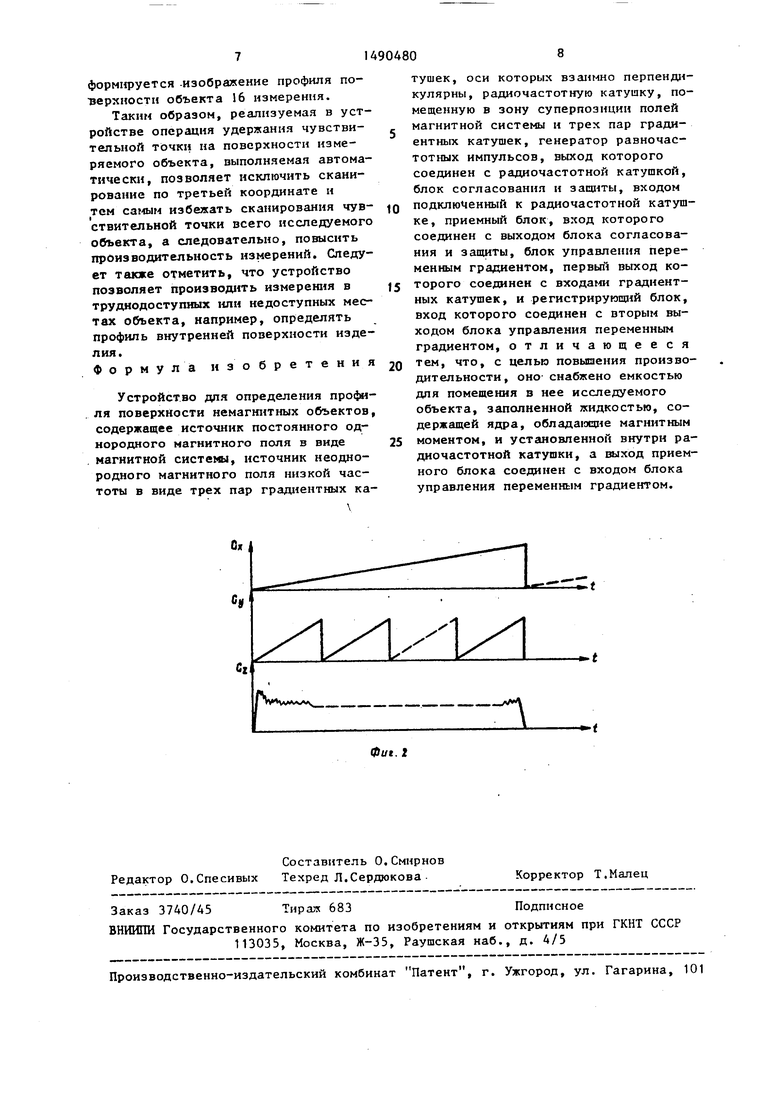
пары катушек 6 и 7 выделяется чувствительная точка. Клок 4 управления формирует управляющие сигналы дпя градиентной системы таким образом, что градиенты GX, GU, G при отсутстзии объекта 16 измерения имеют вид, показанный на фиг. 2. При измерении профиля поверхности объекта 16 в каждый момент времени значения нап- ряженш управления градиентами G,(,
GU, G соответствуют координатам X, Y, Z точек поверхности объекта. Генератор 11 радиочастотных импульсов вырабатывает импульсы, поступающие на радиочастотную катушку 8 и возбуждающие в жидкости 9 сигнал свободной ядерной индукции, который через блок 12 согласования и защиты поступает в приемный блок 13, а с его выхода - в блок 1А управления.
Положение чувствительной плоскости зависит от сигнала на выходе приемного блока 13. Если чувствительная точка находится в жидкости, то под действием управляющего сигнала с вы
0
5
жется 3 напразлении поверхности измеряемого объекта 16. Если точка попадает внутрь измеряемого объекта 16, то сигнал на выходе приемного блока 13 исчезает, и направление изменения градиента G автоматически меняется на противоположное. Таким образом, чувствительная точка постоянно удерживается на поверхности измеряемого объекта 16. Сигнал с второго выхода блока 14 управления, пропорциональные значениям координат положения чувствительной точки, поступают в регистрирующий блок 15, в котором
орм1фуется -изображение профиля поерхности объекта 16 измерения.
Таким образом, реализуемая в устройстве операция удержания чувствительной точки на поверхности измеряемого объекта, выполняемая автоматически, позволяет исключить сканирование по третьей координате и тем самым избежать сканирования чув- ствительной точки всего исследуемого объекта, а следовательно, повысить производительность измерений. Следует также отметить, что устройство позволяет производить измерения в труднодоступных или недоступных местах объекта, например, определять профиль внутреиней поверхности изделия. Формула изобретения
Устройство для определения профи- ля поверхности немагнитных объектов, содержащее источник постоянного однородного магнитного поля в виде магнитной системы, источник неоднородного магнитного поля низкой частоты в виде трех пар градиентных каGX
С
d
I|V4VA
тушек, оси которых взаимно перпендикулярны, радиочастотную катушку, помещенную в зону суперпозиции полей магнитной снстемы и трех пар градиентных катушек, генератор равночас- тотных импульсов, выход которого соединен с радиочастотной катушкой, блок согласования и запц1ты, входом
подключенный к радиочастотной катушке, приемный блок, вход которого соединен с выходом блока согласования и защиты, блок управления переменным градиентом, первый выход которого соединен с входами градиентных катушек, и регистрирующий блок, вход которого соединен с вторым выходом блока управления переменным градиентом, отличающееся
тем, что, с целью повышеиия производительности , оно- снабжено емкостью для помещения в нее исследуемого объекта, заполненной жидкостью, содержащей ядра, обладающие магнитным
моментом, и установленной внутри радиочастотной катушки, а выход приемного блока соединен с входом блока управления переменным градиентом.
| J.Appl | |||
| Phys, 1976, V | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| ХИМИЧЕСКИЙ ОГНЕТУШИТЕЛЬ | 1924 |
|
SU3709A1 |
