Изобретение относится к области расходометрии, в частности к способам измерения скорости потока и/или расхода многофазных текучих сред, представляющих собой мелкодисперсную или недиспергированную смесь газа и многосоставной жидкости (например, смесь газа, нефти и воды).
Имеются расходомеры с датчиками ЯМР (заявка US № 20070164737, МПК G01V 3/00.; заявл. 07.12.2006; опубл. 19.07.2007), в которых скорость потока определяют по амплитуде регистрируемого датчиком ЯМР сигнала, возникающего в результате действия на магнитные ядра вещества определенной последовательности радиочастотных импульсов. При этом зависимость амплитуды сигнала ЯМР от скорости потока базируется на эффекте зависимости от скорости потока величины намагниченности ядер, определяемой либо временем их нахождения в зоне внешнего основного или предполяризующего магнитного поля, либо в зоне приемно-передающей катушки датчика ЯМР.
Главным недостатком расходомеров, основанных на таком принципе, является зависимость амплитуд сигнала ЯМР, а следовательно, и вычисляемых значений скоростей потока и/или расхода текучих сред, от характеристик спин-решеточной релаксации ядер, на которых наблюдается сигнал ЯМР. В результате такие расходомеры имеют ограниченные области применения, так как требуют заранее в алгоритм расчета вводить данные о характеристиках спин-решеточной релаксации измеряемых сред и практически не могут быть использованы в случаях многофазных/многокомпонентных сред, в которых каждая из фаз/компонент будет характеризоваться индивидуальным временем релаксации.
Известны расходомеры (заявка US № 20060020403, G01F 1/00.; опубл. 26.01.2006), использующие постоянный градиент магнитного поля для кодирования информации о скорости потока в фазе сигнала ЯМР.
Известен также расходомер с датчиком ЯМР (пат. 6452390 США, МПК G01F 1/716, G01F 1/704, G01V 3/00. № 09/711914; заявл. 15.11.2000; опубл. 17.09.2002), в котором скорость потока определяется путем фазового кодирования частоты сигнала ЯМР за счет формирования в области расположения катушки возбуждения/детектирования сигнала ЯМР импульсов линейного градиента магнитного поля, ориентированного вдоль направления потока.
Главным недостатком используемого в упомянутых расходомерах принципа является сложность точного определения фазы регистрируемого сигнала ЯМР, а также неоднозначность ее определения для случаев превышения значения 2π, что будет реализовываться при больших скоростях потока. Кроме того, предлагаемые в аналоге технические решения не позволяют установить однозначную связь между значением регистрируемой фазы сигнала с характеристиками скорости потока для случаев неизвестного профиля распределения скоростей, а следовательно, и для случаев разных скоростей течения фаз/компонент многофазной/многокомпонентной среды.
Наиболее близким техническим решением является расходомер (патент US № 6046587, Е21В 47/10, G01F 1/716, 1/74, 1/704, G01R 33/44, 33/60, G01V 3/00, опубл. 04.04.2000), в котором для измерения скорости потока используется датчик ядерного магнитного резонанса (ЯМР), а для определения в протекающей жидкости доли воды (или нефти) используют либо второй датчик ЯМР, либо второй датчик, основанный на явлении электронного парамагнитного резонанса (ЭПР). При этом так же как и в большинстве расходомеров, труба с текущей жидкостью проходит вначале через магнитное поле предполяризующей системы для предварительной поляризации ядер флюида, а затем через основной магнит с однородным магнитным полем, в котором располагается и сам датчик ЯМР, содержащий приемно-передающую радиочастотную катушку, необходимую для возбуждения и регистрации сигналов ЯМР. Фактически в упомянутом патенте предложены решения по нескольким разным способам измерения скорости потока. Часть из этих способов не отличается принципиально от решений, предложенных в других и, в том числе, в уже упомянутых выше патентах. Так, скорость потока флюида предлагается оценивать из сравнительного анализа амплитуд сигнала, получаемых либо от двух датчиков ЯМР, разнесенных между собой на некоторое расстояние вдоль направления потока, либо из анализа амплитуды сигнала ЯМР в условиях действия на систему непрерывной последовательности насыщающих радиочастотных импульсов. В первом случае используется эффект различия в значениях поляризации ядер, которую они достигают к моменту прохождения жидкости через датчики за счет разницы во времени действия на них внешнего магнитного поля. Во втором случае используется эффект ограниченной зоны действия возбуждающего радиочастотного поля (только внутри радиочастотной катушки). Это приводит к тому, что сигнал ЯМР от части флюида, которая за время между импульсами не успевает вытечь из зоны катушки, при достаточной высокой частоте следования возбуждающих радиочастотных импульсов насыщается, в то время как другая часть флюида, вновь втекающая в рабочую зону датчика ЯМР, характеризуется большой амплитудой сигнала. Таким образом, при удачном подборе параметров импульсной последовательности общая амплитуда регистрируемого сигнала может оказаться прямо пропорциональной скорости потока. В общем же случае необходимо иметь тарировочную кривую зависимости амплитуды сигнала ЯМР от скорости потока, в которой были бы учтены характеристики ядерной магнитной релаксации флюида.
Наиболее близким к заявляемому является то предложение в прототипе, которое направлено на получение непосредственной информации о скорости потока каждой из компонент и/или фаз многокомпонентного флюида. Эта цель достигается путем получения функции распределения скоростей потока флюида на основании анализа частотного спектра сигнала ЯМР (сигнала эхо). Сам спектр частот определяют из данных быстрого Фурье-преобразования эхо сигнала ЯМР, регистрируемого в условиях наличия градиента внешнего магнитного поля вдоль направления потока флюида после воздействия на спин-систему, как минимум, двух радиочастотных импульсов с заданным временным интервалом. Действительно, в этом случае из частотного спектра сигнала спинового эхо, полученного после двух радиочастотных импульсов при условии его регистрации во время действия линейного градиента магнитного поля вдоль направления потока, искомый спектр скоростей легко вычисляется при известном (заданном) времени появления сигнала эхо (время между первым радиочастотным импульсом и моментом формирования сигнала эхо) и известном (заданном) значении градиента магнитного поля. Если при этом были обеспечены условия полной поляризации ядер в предполяризующем магните, то из полученного спектра скоростей можно рассчитать не только данные о распределении скоростей для разных фаз (газ и жидкость), но и об их количестве. В частности, величины расхода по жидкости и газу в случае, когда жидкость и газ не смешаны, могут определяться непосредственно из анализа функции распределения скоростей потока, которая будет характеризоваться соответственно двумя максимумами на спектре частот - для жидкости и для газа.
Однако способ, изложенный в прототипе, также имеет недостатки.
Часть замечаний относится к тем предложениям патента, которые, так или иначе, связаны с получением информации о скорости потока по амплитуде сигнала ЯМР на основе либо эффекта неполного насыщения сигнала за счет течения жидкости через приемно-передающую катушку, либо за счет эффекта неполной поляризации ядер в магнитном поле. В обоих случаях информация о скорости потока является опосредованной. Кроме того, при таком способе измерения очень сложно получить информацию о распределении скоростей. Существенная дополнительная неопределенность в результаты измерения будет вноситься возможным изменением во времени характеристик ядерной магнитной релаксации исследуемого флюида. Прежде всего, это касается времен спин-решеточной релаксации, которые сильно зависят от фазового и компонентного состава текущего флюида, что, в свою очередь, в условиях варьирования состава текущего флюида будет приводить к изменению во времени как степени насыщения сигнала ЯМР радиочастотными импульсами, так и степени частичной поляризации (для случая неполной поляризации) ядер в предполяризующей магнитной системе. Именно эти эффекты в данном патенте, так же как и в ряде других заявочных и патентных материалах (например, см. заявку US № 20070164737, МПК G01V 3/00), предлагается использовать для определения характеристик скорости потока флюида. Другими словами, обсуждаемый способ может быть успешно реализован только в тех случаях, когда распределение скоростей по сечению потока заранее определено и фиксировано. Кроме того, также должны быть известны и неизменны во времени характеристики ядерной магнитной релаксации (прежде всего, время спин-решеточной релаксации). Совершенно очевидно, что в реальных условиях указанные требования невыполнимы. Действительно, функция распределения скоростей будет зависеть не только от самой скорости потока (при больших скоростях возможен переход от ламинарного потока к турбулентному), но и от состава жидкости, наличия в ней газа, распределения газа в жидкости и т.д. Кроме того, нельзя пренебрегать и таким нежелательным эффектом, как возможное отложение асфальтосмолистых и парафиновых соединений на внутренней поверхности трубы, что будет приводить к изменению формы и уменьшению площади поперечного сечения потока текущего флюида. Это неминуемо скажется как на распределении скоростей потока, так и на самой скорости, что, в свою очередь, приведет к ошибкам в определении значений скорости в обсуждаемом способе. Если же говорить о требовании неизменности характеристик ядерной магнитной релаксации текущего флюида, то также очевидна невыполнимость этого требования в реальных условиях. Дело в том, например, что скорость спин-решеточной релаксации будет различной не только для разных компонент (нефть, вода) флюида, но и для разных (жидкость, газ) его фаз. В тех случаях, когда указанные компоненты и фазы пространственно разделены (имеют малую площадь соприкосновения) отмеченные различия в характеристиках времен релаксации можно даже использовать для получения количественных характеристик потока по каждой компоненте и фазе. Однако в большинстве случаев это не так. Молекулы газа могут быть не только распределены по жидкости в виде пузырьков, но и частично растворены в жидкости, а вода может образовывать с нефтью водно-нефтяную эмульсию. И в том, и в другом случае как за счет взаимного растворения, так и за счет малости размеров пузырьков газа в жидкости или за счет малости размеров капель воды (или нефти) в дисперсионной среде будут реализовываться условия больших значений удельной площади S/V (где S - поверхность раздела фаз или компонент, а V - их объем), что приведет к возможности осуществления интенсивного молекулярного или спинового обмена между спиновыми/молекулярными подсистемами фаз или компонент. В результате такого обмена для части флюида произойдет усреднение характеристик ядерной релаксации, причем значение средней скорости релаксации будет зависеть от многих неконтролируемых параметров: парциальных значений времен релаксации упомянутых фаз/компонент, подвижности молекул жидкости, зависящей, в том числе, от концентрации растворенного газа в жидкости; размеров и формы пузырьков или капель; характеристик межфазного слоя и т.д. В условиях эксплуатации многофазного расходомера в нефтяной промышленности в качестве многофазного флюида будет выступать смесь нефти, воды и газа. Очевидно, что характеристики магнитной релаксации упомянутых составляющих смеси будут зависеть не только от месторождения, конкретной скважины, но также будут изменяться во времени. Причем зависимость характеристик добываемой водно-нефтяной смеси от времени во многом носит случайный характер, не поддающийся систематизации и, следовательно, учету в работе расходомера.
Таким образом, в самом предлагаемом способе регистрации скорости потока по зависимости амплитуды сигнала ЯМР от времени нахождения ядер в магнитном поле заключается и его главный недостаток, связанный с тем, что достигаемая к моменту регистрации сигнала величина намагниченности ядер, при прочих равных условиях, сильно зависит от характеристик ядерной релаксации текущего флюида. Особенно сильно этот недостаток будет проявляться при измерении многофазных/многокомпонентных потоков. Действительно, система предполяризующего магнитного поля по определению должна обеспечить предварительную поляризацию ядер прежде, чем они попадут в зону датчика ЯМР. Причем желательно, чтобы уровень поляризации был близок к максимальному (равновесному для величины используемого магнитного поля в области датчика ЯМР) для всех компонент и фаз в потоке. В противном случае разные компоненты и фазы флюида будут поляризованы в разной степени в зависимости от значений соответствующих им времен T1 спин-решеточной релаксации: сильнее всего будут поляризованы те компоненты и фазы, которые будут обладать наименьшими значениями T1. В результате относительный вклад в регистрируемый сигнал от компонент и фаз флюида с большими значениями времен T1 будет занижен по сравнению с таковым для случая, когда предполяризующая магнитная система обеспечивает достижения равновесной поляризации ядер для всех компонент и фаз флюида. Это будет приводить к ошибкам в вычислении характеристик расхода по компонентам и фазам. Таким образом, от качества выполнения предполяризующего магнита в конечном счете зависит качество работы всего устройства - точность измеряемых характеристик. Причем этот вывод сохраняет свою актуальность независимо от принципа, используемого в ЯМР расходомере для измерений скорости потока.
Наиболее прямой путь, обеспечивающий достижение заданного (равновесного для данной напряженности магнитного поля) значения поляризации ядер, предполагает увеличение времени нахождения флюида в поле этого магнита до величин порядка 5T1. На практике решение этой задачи приводит к существенному увеличению размеров предполяризующего магнита, так как конструкция этой части расходомера, как правило, классическая. Это труба с текущей в ней жидкостью/газом, размещенная в зазоре между полюсами двух магнитов, внешние поля которых замкнуты между собой массивной конструкцией из магнитопроводящего материала. К примеру, если использовать один из стандартных внутренних диаметров трубопровода 0,07 м, а время спин-решеточной релаксации T1 принять равным 1 сек, то легко найти, что для расхода 100 м3/сут длина участка трубопровода, находящегося в магнитном поле, должна быть не меньше полутора метров. Следовательно, и размеры предполяризующего магнита должны быть не меньше указанной величины. В конечном счете это приводит к существенному увеличению размеров и веса всего расходомера.
Следующие замечания относятся непосредственно к тому предложению патента, в котором информацию о скорости потока предлагается получать из анализа спектра частот в сигнале спинового эхо.
В качестве первого критического замечания отметим, что в предлагаемом устройстве и схеме воздействия радиочастотными импульсами амплитуда сигнала спинового эхо будет заниженной, так как за время между возбуждением сигнала ЯМР и моментом регистрации сигнала эхо часть флюида успевает покинуть рабочую зону датчика ЯМР и не дает вклада в сигнал эхо. Причем чем больше скорость течения, тем в большей степени будет занижена амплитуда сигнала эхо. Так как при течении флюида по трубе всегда существует распределение скоростей, то очевидно, что для слоев с разными скоростями отмеченный эффект также будет различен: максимальным он будет для тех слоев флюида, которые характеризуются максимальными значениями скорости потока. Таким образом, искажения в регистрируемом спектре проявятся, прежде всего, в области больших скоростей, которые определяют основной вклад в значения расхода. Следовательно, отмеченный эффект способен привести к существенным ошибкам в определении характеристик расхода флюида в целом, а компонент с высокими скоростями потока - в особенности.
Следующая проблема возникает в связи с тем, что разные компоненты и разные фазы флюида, как правило, будут характеризоваться разными значениями времен спин-спиновой (T2) релаксации и, кроме того, разными значениями коэффициентов самодиффузии. В результате их относительные вклады в сигнал эхо будут зависеть как от времени, прошедшего с момента подачи первого возбуждающего радиочастотного импульса до момента регистрации эхо, так и от параметров градиента магнитного поля, который необходимо применять для частотной кодировки скоростей компонент и фаз флюида. Более того, при регистрации сигналов ЯМР в потоке флюида в условиях наличия градиента магнитного поля нельзя не учитывать и эффекты так называемой наведенной диффузии - появление дополнительного к самодиффузии распределения смещений молекул за счет распределения скоростей.
Еще одна важная проблема связана с тем, что, строго говоря, математическая операция Фурье-преобразования некорректна в случаях, когда оцифровка сигнала во временной области происходит в условиях переменной частоты сигнала. При течении флюида вдоль направления градиента магнитного поля реализуется именно это нестандартное условие. Причем частота прецессии спинов презонирующих ядер будет меняться во времени так быстро, как быстро за счет скорости потока будет меняться положение ядер вдоль оси направления градиента магнитного поля. Этот эффект и является, по сути, источником информации о скорости потока.
Технической задачей предлагаемого изобретения является создание простого и точного способа и устройства для измерения скорости потока флюида в трубопроводе, работающего в широком диапазоне скоростей и фазовых составов флюида.
Техническая задача решается способом измерения скорости потока многофазного флюида при помощи регистрации сигнала ядерного магнитного резонанса (ЯМР) в условиях действия градиента магнитного поля, направленного вдоль направления потока, и последующего преобразования измеренного сигнала в частотный спектр.
Новым является то, что с целью повышения точности результатов измерений и минимизации искажающего амплитуду сигнала эффекта, обусловленного втекающим/вытекающим флюидом из рабочей зоны приемной катушки, первоначальное возбуждение ядер осуществляют только в части приемной катушки - в объеме слоя, ориентированного поперек потока и характеризующего малой толщиной по сравнению с размером рабочей зоны приемной катушки вдоль направления потока, при этом момент времени регистрации сигнала выбирают таким, чтобы за период времени от момента первоначального возбуждения ядер до момента регистрации сигнала при максимальной скорости потока для всех фаз флюида этот слой находился в пределах рабочей зоны данной катушки, которая определяется длиной катушки.
Новым также является то, что зону первоначального возбуждения ядер в виде слоя формируют в начале приемной катушки - со стороны втекающего потока флюида, благодаря взаимному расположению приемной и градиентной (или передающей) катушек.
Новым также является то, что с целью повышения точности результатов измерений и минимизации эффекта некорректности операции Фурье-преобразования в условиях переменной частоты время регистрации сигнала эхо минимизируют.
Новым также является то, что при помощи последовательности радиочастотных импульсов формируют два и более сигналов эхо в разные моменты времени, которые регистрируют при наличии градиентов магнитного поля в максимально одинаковых условиях, далее для этих сигналов выполняют Фурье-преобразование и получают два или более частотных спектров, из которых по разнице в частотах соответствующих спектральных линий, то есть по зависимости их частоты от времени формирования сигнала эхо, судят о скоростях составляющих потока.
Новым также является то, что с целью получения информации о зависимостях частоты и амплитуды от времени для отдельных компонент сигнала и использования этой информации в окончательных расчетах характеристик текущего флюида частотные спектры, полученные для разных времен формирования сигнала эхо, подвергают двумерному анализу, из которого по зависимостям частоты от времени находят скорости, по зависимостям амплитуд от времени - дополнительные характеристики состава и свойств флюида, а по экстраполированным на нулевое время значениям амплитуд - относительные доли компонент и фаз флюида с определенными для них значениями скоростей.
Для решения технической задачи осуществления предлагаемого способа может быть использовано устройство, содержащее трубопровод для потока многофазного флюида, корпус с магнитной системой для поляризации ядер и датчиком, работающим на явлении ЯМР, электронные блоки градиента, передатчика и приемной системы; электронную систему управления, сбора и хранения информации; процессор для обработки поступающей информации по заданным алгоритмам, датчики давления и температуры, а также предполяризующую магнитную систему.
Новым является то, что предполяризующая магнитная система выполнена в виде параллельных пластин из магнитного материала, расположенных в поперечном сечении внутри корпуса, одновременно выполняющего роль трубопровода, и сориентированных по потоку флюида, причем силовые линии магнитного поля, создаваемые внутренними слоями, максимально эффективно замыкаются на полюса магнитов соседних слоев, создавая заданное распределение плотности силовых линий в зазорах между слоями.
Новым также является то, что с целью упрощения и облегчения конструкции предполяризующей магнитной системы корпус выполнен из материала с высокой магнитной проницаемостью (например, железо).
Новым также является то, что с целью повышения эффективности внешнего магнитопровода корпус дополнительно окружен проволочным или листовым материалом с соответствующими ему магнитными характеристиками.
На фиг.1 изображена схема осуществления способа.
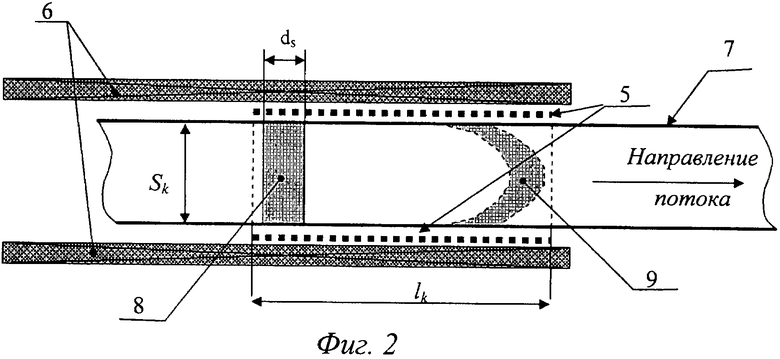
На фиг.2 изображена схема осуществления способа с использованием градиентной катушки.
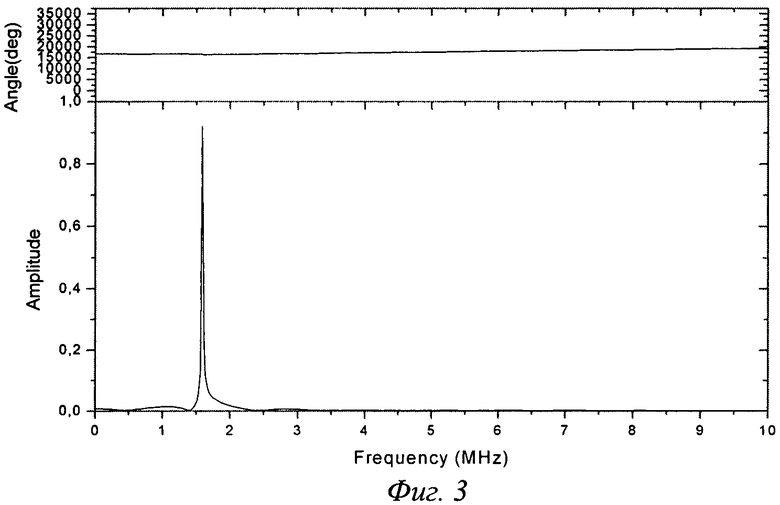
На фиг.3 изображен частотный спектр в условиях постоянной частоты сигнала (f0=1.59 МГц), где время регистрации сигнала 40 мкс.
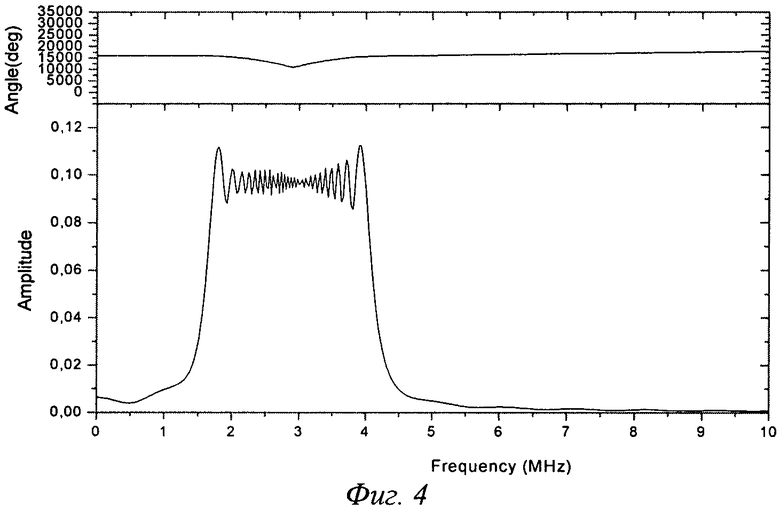
На фиг.4 - частотный спектр в условиях переменной частоты сигнала, где время регистрации сигнала 40 мкс, при первоначальном значении частоты f0=1.59 МГц.
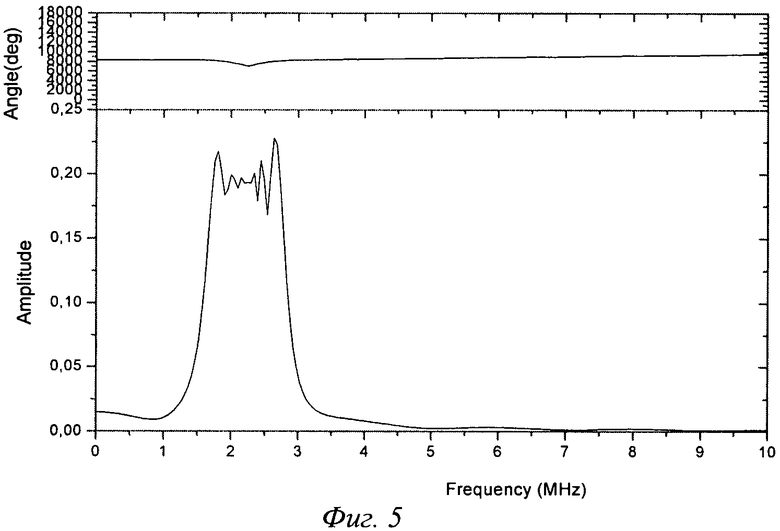
На фиг.5 - частотный спектр в условиях переменной частоты сигнала, где время регистрации сигнала 20 мкс, при первоначальном значении частоты f0=1.59 МГц.
На фиг.6 - частотный спектр в условиях переменной частоты сигнала, где время регистрации сигнала 10 мкс, при первоначальном значении частоты f0=1.59 МГц.
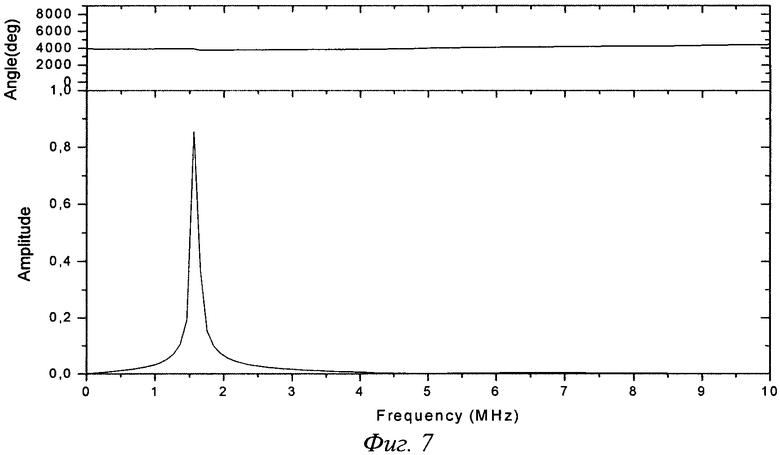
На фиг.7 изображен частотный спектр в условиях постоянной частоты сигнала (f0=1.59 МГц), где время регистрации сигнала 10 мкс.
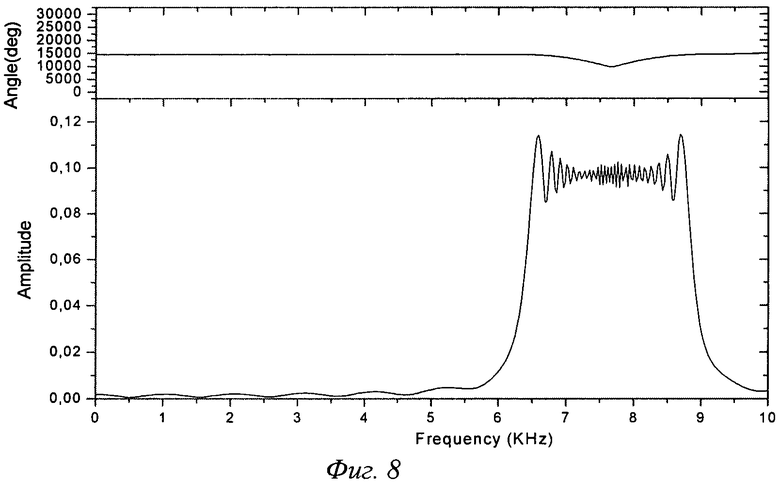
На фиг.8 изображен частотный спектр в условиях переменной частоты сигнала, где время регистрации сигнала 40 мкс, при первоначальном значении частоты ft=4f0=6.36 МГц.
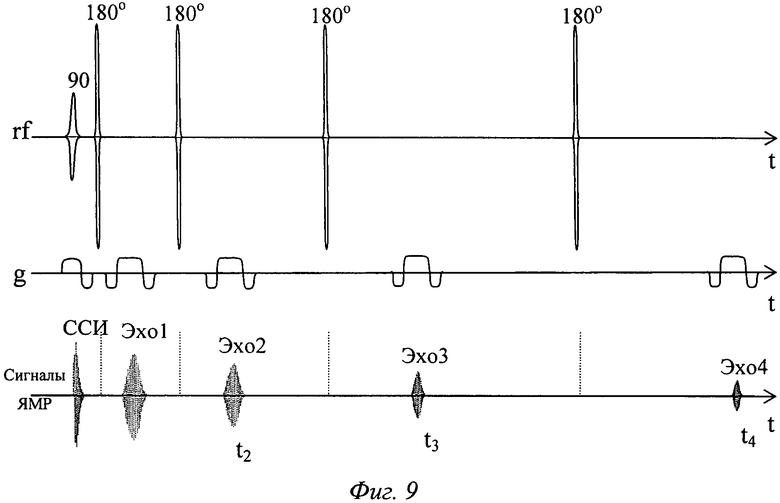
На фиг.9 изображена последовательность радиочастотных импульсов (rf - канал передатчика), импульсов градиента магнитного поля gv и сигналов ЯМР (ССИ и эхо).
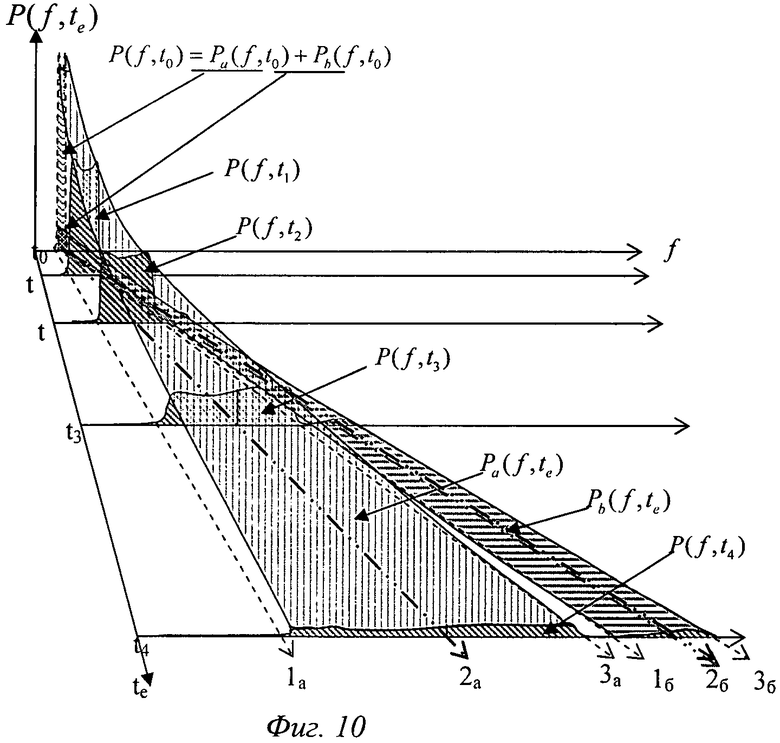
На фиг.10 изображен вид спектров Р(f,te), полученных в результате Фурье-преобразования сигналов эхо1, эхо2, эхо3 и эхо4 для времен их формирования t1, t2, t3 и t4 (см. фиг.9).
Устройство для реализации способа содержит предполяризующую магнитную систему с корпусом 1 и магнитами 2 для поляризации ядер, основную магнитную систему 3 с магнитами 4 и датчик (приемно/передающая катушка) 5 (фиг.1 и 2), работающий на явлении ЯМР, электронные блоки градиента (не показаны), передатчика и приемной системы (не показаны); электронную систему управления (не показана), сбора и хранения информации (не показаны); процессор (на фиг. не показан) для обработки поступающей информации по заданным алгоритмам, датчики давления и температуры (на чертеже не показаны), а также градиентную катушку 6 (фиг.1 и 2) и трубопровод 7 (фиг.1 и 2), проходящий через датчик ЯМР. При этом трубопровод 7 выполнен из диэлектрика. Магниты в предполяризующей магнитной системе (фиг.1) выполнены в виде параллельных пластин 2 из магнитного материала (магнитов - см. Вид Б), расположенных в поперечном сечении внутри корпуса 1 и сориентированных параллельно потоку флюида, причем силовые линии магнитного поля, создаваемые внутренними слоями, максимально эффективно замыкаются на полюса магнитов соседних слоев, создавая заданное распределение плотности силовых линий в зазорах между слоями. Направление магнитного поля в предполяризующей магнитной системе ориентируют в направлении, совпадающем с направлением основного магнитного поля, создаваемом магнитами 4 в основной магнитной системе 3. Устройство содержит также второстепенные элементы 10 и 11, предназначенные для герметичного соединения трубопровода 12 с корпусом 1 предполяризующей магнитной системы и трубопроводом 7 из диэлектрика, которые, в общем случае, имеют разные поперечные сечения. Датчик 5 (фиг.1 и 2), выполненный в виде приемной катушки, подбирают такой длины lk, а трубопровод 7 (фиг.2) с таким проходным сечением Sk, чтобы за время регистрации сигнала ds этот слой первоначального возбуждения ядер ds (фиг.1 и 2)после намагничивания, которая производится в части приемной катушки 5, находился в пределах данной катушки 5.
С целью упрощения и облегчения конструкции предполяризующей магнитной системы корпус 1 предполяризующей магнитной системы выполнен из материала с высокой магнитной проницаемостью (например, железо) и выполняет роль внешнего магнитопровода. При этом с целью повышения эффективности внешнего магнитопровода корпус 1 дополнительно может быть окружен проволочным или листовым материалом (не показаны) с соответствующими ему магнитными характеристиками.
Параллельные пластины 2 предполяризующей магнитной системы установлены в корпусе 1 с возможностью изменения их количества и зазора между ними и/или замены на магнитные пластины такой же формы, но выполненные из магнитного материала, характеризующегося более высокой поверхностной плотностью магнитных силовых линий по сравнению с магнитным материалом замещаемых пластин.
Для того чтобы использовать предложенный в прототипе метод прямой регистрации спектра скоростей потока жидкости, путем применения процедуры быстрого Фурье-преобразования к сигналу ЯМР, необходимо:
а) регистрацию сигнала производить в условиях наличия градиента gv магнитного поля, направленного вдоль направления потока флюида;
б) сигнал должен регистрироваться спустя некоторое заданное время te после возбуждения спиновой системы для того, чтобы за это время молекулы флюида переместились вдоль направления потока на расстояние

где ν - искомая скорость потока флюида.
Тогда зависимость f(ν) частоты регистрируемого сигнала от скорости для случая линейного градиента магнитного поля имеет вид

где γ - есть гиромагнитное отношение резонирующих ядер,
Н0 - значение напряженности внешнего магнитного поля в зоне датчика ЯМР,
С - некоторая константа, связанная с преобразованиями частоты сигнала в электронных блоках приемного канала устройства и в процессорах.
Строго говоря, для определения скорости потока необходимо знать не саму частоту сигнала ЯМР, а ее сдвиг (изменение) по сравнению с частотой f(0) сигнала, зарегистрированного либо при нулевой скорости потока (ν=0), либо при нулевом градиенте магнитного поля (gv=0), либо при нулевом времени (te=0). Тогда для сдвига частоты можно ожидать выполнения простого соотношения

Если текущий флюид будет характеризоваться спектром скоростей или будет содержать фазы с существенно различающимися значениями скоростей потока, то в этих случаях будет наблюдаться соответствующая форма спектра частот, однозначно связанного со спектром скоростей. При этом если учесть эффекты ядерной релаксации, то интегральные интенсивности для линий в частотном спектре будут отражать спиновые плотности текущих компонент и фаз флюида.
Итак, рассмотрим вышеизложенное с точки зрения возможности реализации на практике. Как мы уже отмечали выше, первая проблема заключается в искажении частотного спектра сигнала за счет того, что за время te обязательно должен быть зафиксирован сдвиг положения молекул флюида на расстояние le=te·ν, прямо пропорциональное скорости течения ν. В результате за указанное время часть уже поляризованного и способного дать сигнал эхо флюида покинет рабочую зону датчика ЯМР и тем самым уменьшит амплитуду сигнала. Чем больше значение ν, тем больше будет эффект занижения амплитуды сигнала, а при наличии распределения скоростей тем больше будет искажаться форма регистрируемого частотного спектра и, следовательно, форма вычисляемого по нему спектра скоростей.
Наше предложение (см. фиг.1 и 2) заключается в том, чтобы радиочастотным импульсом первоначально возбуждать не весь флюид, находящийся в зоне приемной катушки датчика ЯМР, а только его часть (слой 8). Тогда для любой заданной скорости потока ν интервал времени te, определяемый как время между возбуждением слоя 8 и регистрацией сигнала эхо, может быть выбран так, чтобы к моменту времени te возбужденные ядра оказались в положении (слой 9), не выходящем за пределы рабочей зоны приемной катушки датчика ЯМР. При известных максимальной скорости фаз потока флюидов, определяемых из условий работы трубопровода, и минимальном оптимальном времени te, определяемом характеристиками электронных блоков устройства (передатчик, приемник, блок градиента магнитного поля и т.д.) и требованиями к времени регистрации сигнала, подбирают параметры проходного сечения Sk корпуса трубопровода 7 и длину lk (фиг.2) приемной катушки 5 датчика ЯМР.
Наиболее оптимальным представляется выбирать зону (слой) 8 (фиг.1 и 2) возбуждения с толщиной ds (фиг.2) таким образом, чтобы она оказалась в начальной (по направлению потока флюида) области приемной катушки 5. Тогда при длине приемной катушки, например, lk и скорости потока ν положение сигнала эхо можно будет выбирать исходя из условия

В частности, из этого же неравенства наглядно видно, что при условии lk=ds вообще нельзя установить для te значение, не равное нулю.
Поставленная задача может быть достигнута несколькими способами. Один из них предполагает наличие, например, двух радиочастотных катушек: одна передающая (не показано), а другая - приемная. В этом случае положение зоны возбуждения будет определяться положением передающей катушки относительно приемной.
Поскольку в устройстве уже содержится градиентная катушка 6 (фиг.1 и 2), то более предпочтительным является другое решение, основанное на эффекте селективного возбуждения спинов в условиях, когда на спиновую систему одновременно действуют радиочастотным импульсом возбуждения и градиентом магнитного поля. Такая комбинация воздействий в ЯМР-томографии известна как селективный радиочастотный импульс. В этом случае задача формирования зоны (слоя) 8 (фиг.1 и 2) возбуждения с толщиной ds (фиг.2) таким образом, чтобы она оказалась в начальной (по направлению потока флюида) области приемной катушки 5, решается путем соответствующего смещения градиентных катушек 6 относительно приемно/передающей. Тогда при выборе интервала времени между моментами возбуждения и регистрации сигнала, удовлетворяющего условию te≤(lk-ds)/ν, зона возбуждения 8 переместится в положение 9, но не выйдет за пределы рабочей зоны катушки 5 и, следовательно, будет обеспечена регистрация неискаженного сигнала ЯМР. Это даст возможность получать неискаженную информацию о скорости и распределении скоростей текущего флюида.
Как известно, для достижения равновесной поляризации ядер необходимо выполнение одного условия: текущий флюид должен находиться в магнитном поле предполяризующего магнита в течение времени

где T1 - есть время спин-решеточной релаксации.
При фиксированных размерах предполяризующего магнита обычно время tpol нахождения флюида в магнитном поле увеличивают путем придания трубопроводу формы змеевика, так, как это сделано, например, в прототипе. В этом случае время нахождения флюида в магнитном поле будет определяться не только размером (lII) магнита в направлении потока, но поперечным размером (l⊥), который при заданном внешнем диаметре (D) трубопровода будет определять количество (n) колен на змеевике:
n=l⊥/D
Тогда при заданной средней скорости потока ν время нахождения флюида в магнитном поле будет определяться как tpol=n·lII/ν. Недостатком такой конструкции является необходимость создания предполяризующей магнитной системы с большой площадью сечения магнитного поля, что в совокупности с необходимым внешним магнитопроводом приводит к утяжелению конструкции и неэффективному использованию магнитного материала.
Для создания более эффективной и компактной конструкции предполяризущей магнитной системы мы предлагаем магнитный материал расположить слоями внутри корпуса 1 в виде пластин 2, как показано на фиг.1, при этом использовать увеличенное проходное сечение корпуса 1, выполняющего одновременно роль трубопровода для текущего флюида. При этом часть поперечного сечения, занимаемая собственно магнитным материалом, может быть сделана относительно небольшой за счет использования тонкого (примерно 1.6-3.2 мм) магнитного материала так, что результирующее проходное сечения между пластинами сохранится достаточно большим. Расстояние между слоями магнитного материала будет определяться необходимым значением напряженности магнитного поля, однако, в любом случае оно будет существенно больше толщины магнитного материала. По нашим расчетам, при использовании высококачественных магнитных материалов пластин 2 на основе редкоземельных металлов в предлагаемой конструкции можно добиться условий, когда суммарное поперечное сечение магнитных пластин будет составлять не более 10-20% от исходной площади внутреннего поперечного сечения корпуса 1. Таким образом, если, например, корпус 1 выполнить в виде отрезка трубы, то увеличение его диаметра, например, всего в 3 раза по сравнению с диаметром основного трубопровода 12 (фиг.1) будет приводить к уменьшению скорости потока флюида в нем не менее чем в 7 раз. При этом необходимое значение напряженности магнитного поля можно регулировать количеством и, следовательно, расстоянием между слоями последовательно расположенных магнитов внутри трубопровода за счет установки и удаления дополнительных пластин. В предлагаемой конструкции поток флюида осуществляется в пространстве между магнитными пластинами, полюса которых ориентированы так, что силовые линии магнитного поля, создаваемые полюсами внутренних магнитных пластин, эффективно замыкаются на противоположные полюса магнитов соседних пластин, разделяя тем самым поперечное сечение трубопровода на области с последовательно связанными магнитными полями и создавая заданное распределение плотности силовых линий в зазорах между слоями. Эффективность предложенной конструкции состоит и в том, что внешний магнитопровод требуется только для замыкания силовых линий магнитного поля крайних магнитных пластин. При этом корпус 1, выполненный из железа, частично сам может выполнять функцию внешнего магнитопровода. При необходимости корпус 1 в этой части может содержать дополнительный внешний магнитопровод, например, в виде намотки листового или проволочного материала с соответствующими магнитными характеристиками. Длину и проходное сечение отрезка трубопровода (корпуса 1) с расположенными внутри него магнитными пластинами 2 выбирают так, чтобы при заданных максимальных значениях скорости потока и времен спин-решеточной релаксации за время прохождения флюида по нему были обеспечены условия полной поляризации ядер в предполяризующем магните.
Эффективно уменьшить время, необходимое для достижения значения поляризации ядер M0, равновесного для напряженности магнитного поля H0, можно путем помещения ядер на некоторое время в магнитное поле с напряженностью большей, чем H0. Так, например, если в поле с напряженностью Hpol≈Н0 значение поляризации М=0.9·М0, равное 90% от равновесного, достигается за время t≈2.3·T1, то в поле с напряженностью Hpol≈2·Н0 для той же цели потребуется в четыре раза меньшее время. Необходимость такой ускоренной поляризации ядер может возникнуть в случаях больших скоростей потока. Создание в определенной части предполяризующего магнита повышенного по сравнению с H0 значения напряженности магнитного поля может быть легко достигнуто путем, например, добавления дополнительных пластин магнитного материала между уже существующими пластинами и/или замены на магнитные пластины такой же формы, но выполненные из магнитного материала, характеризующегося более высокой поверхностной плотностью магнитных силовых линий по сравнению с магнитным материалом замещаемых пластин.
Теперь рассмотрим проблему, связанную с тем, что, как уже упоминалось, математическая операция Фурье-преобразования некорректна в случаях, когда оцифровка сигнала во временной области происходит в условиях переменной частоты сигнала. Это обстоятельство наглядно демонстрируется на фиг.3-8.
На фиг.3 показана форма частотного спектра, полученного в результате операции Фурье-преобразования некоторого модельного сигнала, зарегистрированного во временной области в условиях постоянной частоты сигнала f0=1.59 МГц. Время регистрации сигнала составляло 40 мкс. На фиг.4 показан результат Фурье-преобразования для сигнала, отличающегося от предыдущего, только тем, что теперь частота сигнала линейно изменялась во времени (что соответствует условиям стационарного потока флюида вдоль направления линейного градиента магнитного поля). Здесь и далее скорость изменения частоты сигнала задавалась одинаковой и равнялась 1.59 МГц за 50 мкс. Причем в момент начала регистрации сигнала его частота соответствовала значению f0=1.59 МГц (за исключением ситуации, показанной на фиг.8). Все остальные условия были неизменными. Из сравнения спектров на фиг.3 и 4 явно видно, сколь сильно искажается результат Фурье- преобразования в случае непостоянства частоты регистрируемого сигнала. Более того, показанные искажения спектра не удается формализовать какими-либо простыми соотношениями, которые могли бы, например, среднюю МГц за время измерения (40 мкс) частоту сигнала  связать с частотой, соответствующей середине (примерно 3 МГц) спектра, показанного на фиг.4.
связать с частотой, соответствующей середине (примерно 3 МГц) спектра, показанного на фиг.4.
Результаты Фурье-преобразования сигнала с частотой, зависящей линейно от времени, явно улучшаются, если уменьшать время измерения. Это хорошо демонстрируется сравнением спектров, представленных на фиг.4, 5 и 6, которые получены в условиях последовательного уменьшения времени регистрации: 40, 20 и 10 мкс соответственно.
Спектр, показанный на фиг.7, соответствует ситуации с фиксированной во времени частотой сигнала. Оба спектра на фиг.6 и фиг.7 получены в одинаковых условиях по времени регистрации сигнала, которое было так мало (10 мкс), что за это время частота сигнала в случае, представленном на фиг.6, изменялась по сравнению с первоначальной всего на 20%.
Для исключения ошибок, связанных с некорректностью выполнения математической операции Фурье-преобразования сигналов с зависящей от времени частотой, в нашем способе предлагается производить несколько измерений сигнала ЯМР текущего флюида с заданными между ними промежутками времени так, чтобы при этом все остальные условия (продолжительность измерения, амплитуда градиента магнитного поля, скорость потока) регистрации сигнала были максимально одинаковыми. Одинаковость перечисленных условий несложно выполнить для условия стационарного потока, так как амплитуда градиента магнитного поля и продолжительность измерения задаются программно в блоке управления устройством. Условие стационарности потока флюида в трубопроводе в общем случае, конечно же, невыполнимо, однако при выборе малых значений для интервалов времени между упомянутыми измерениями всегда можно будет говорить о выполнении условий квазистационарности (в течении времени измерения необходимых характеристик) процесса течения.
Тогда анализируя спектры, полученные вышеописанным способом для разных времен регистрации сигнала, можно будет легко найти частотный сдвиг между ними, из которого при известных параметрах градиента магнитного поля и интервала времени между измерениями может быть вычислена скорость потока. Это хорошо демонстрируется сравнением спектров, представленных на фиг.4 и фиг.8.
Спектр, представленный на фиг.8, получен для сигнала, который в отличие от ситуации, показанной на фиг.4, был сдвинут по частоте вверх на 4.77 МГц. Как видно из сравнения упомянутых спектров, их вид сильно искажен эффектом непостоянства частоты, но эти искажения примерно одинаковы, так как все условия регистрации сигнала были идентичны и в обоих случаях частота сигнала в течение времени регистрации увеличивается на одинаковую величину 1.27 МГц. Легко видеть, что при этом главная информация, закодированная в относительном сдвиге обсуждаемых спектров относительно друг друга, не искажена и соответствует заданному в модельных расчетах значению 4.77 МГц.
Итак, для реализации вышеизложенного предложения необходимо использовать такую импульсную последовательность, которая позволяла бы формировать, как минимум, два сигнала эхо и осуществлять тем самым два измерения в максимально одинаковых условиях, различающихся между собой только временем. При этом для каждого из этих измерений путем быстрого Фурье-преобразования получают частотные спектры, которые будут характеризоваться одинаковыми искажениями, связанными с эффектом непостоянства частоты сигнала во время измерения, но разными сдвигами частот, обусловленными разными временами регистрации сигнала эхо. Из сравнения полученных частотных спектров по соответствующим алгоритмам обработки в процессоре устройства будет вычисляться спектр сдвига частот, который, в свою очередь, по известному линейному закону связан с искомым спектром скоростей исследуемого флюида.
На фиг.9 показана последовательность радиочастотных импульсов, воздействующих на спиновую систему (rf - канал передатчика): первый импульс 90°-ный, остальные -180°-ные. Первый 90°-й импульс является селективным, так как он сформирован на фоне действия градиента магнитного поля gν. Форма импульса градиента такова, что после формирования основной части с положительным знаком градиента формируется градиент обратного знака. Длительность действия градиента с отрицательным знаком подбирается из условия компенсации дисперсии фаз резонирующих ядер, возникающей в результате действия основного градиента. Другими словами, параметры импульсов градиента (упомянутого и всех последующих) выбираются так, чтобы их интегральные значения равнялись нулю.
Если первый импульс градиента необходим для того, чтобы 90°-ный радиочастотный импульс оказывал селективное воздействие на резонирующие ядра в зоне 8 (фиг.1 и 2), то остальные импульсы градиента обеспечивают частотную кодировку положения ядер в моменты формирования сигналов эхо1 (фиг.9), эхо2, эхо3 и т.д. Координаты ядер в эти моменты времени будут смещены от первоначальных вдоль направления потока на величину, пропорциональную скорости ν и прошедшую с момента возбуждения первым радиочастотным импульсом времени - t1, t2, t3, … для сигналов эхо1, эхо2, эхо3, … соответственно.
Каждое новое положение резонирующих ядер в моменты формирования эхо может быть продетектировано путем оцифровки сигнала в условиях градиента магнитного поля, направленного вдоль потока. В результате последующего Фурье-преобразования для каждого времени te=t1, t2, t3, … формирования сигнала эхо получают частотный спектр P(f,te), который в стационарном режиме будет линейно связан со спектром скоростей K(ν):

Функция R(ν,te) в этом выражении отражает то обстоятельство, что с ростом значения времени te сигнал ЯМР подвержен дополнительному затуханию вследствие спин-спиновой релаксации, расфазировки в неоднородном магнитном поле, расфазировки за счет самодиффузии и наведенной диффузии. В общем случае, указанные причины уменьшения с ростом te амплитуды сигнала ЯМР не удается факторизовать, так как их характеристики (времена релаксации, коэффициенты самодиффузии и т.д.) могут различаться для компонент флюида, характеризующихся разными скоростями ν. Единственное время, при котором неизвестная функция R(ν,te) не искажает частотный спектр, есть нулевое время te=t0=0, и только при этом времени частотный спектр P(f,te) можно считать нормированным на единицу. Следовательно, полное восстановление вида спектра К(ν) оказывается возможным путем сравнительного анализа частотных спектров R(f,te), полученных для разных времен te и их экстраполяции на нулевое время. Все упомянутые причины описываются убывающими функциями зависимости амплитуды сигнала эхо от времени. Причем часто в качестве таких функций используют экспоненциальные функции. Это позволяет функцию R(v,te) в первом приближении представлять в виде некоего распределения k(ν) экспоненциальных функций типа exp(-te/Tj(ν)), то есть R(ν,te)≈k(ν)·exp(-te/Tj(ν)), где Tj(ν) может выступать в качестве дополнительной характеристики для текущей со скоростью ν компоненты флюида. К примеру, это может быть время спин-спиновой релаксации Tj(ν)=Т2(ν) или фактор, связанный с коэффициентом само диффузии Tj(ν)∝1/D(ν). Установление такой взаимосвязи между характеристиками скорости и временами релаксации и/или коэффициентами самодиффузии сложных флюидов позволяет более однозначно решать задачу соотнесения получаемых экспериментальных данных о скоростях в потоке с определенными компонентами и фазами флюида.
На фиг.10 показан один из возможных вариантов вида спектров R(f,te), получаемых в результате Фурье-преобразования сигналов эхо1, эхо2, эхо3 и эхо4 для времен их формирования t1, t2, t3 и t4 (фиг.10). Время t0 (фиг.10) соответствует нулевому времени, на которое производится экстраполяция значений плотности распределения P(f,te). Из фиг.10 видно, что спектры P(f,te) с ростом времени te становятся все шире и смещаются в область более высоких частот. (Заметим, что при инвертировании знака градиентов магнитного поля будет иметь место обратная картина: спектры P(f,te) с ростом времени te будут смещаться в область более низких частот). Более того, в данном примере распределение по скоростям может быть описано бимодальной функцией: видно, что в общем спектре частот можно выделить две компоненты, которые условно назовем компонентами а и b, описываемые соответственно функциями Pa(f,te) и Pb(f,te).
Пунктирными линиями 1a, 3a и 1b, 3b показаны траектории изменения крайних (fmin и fmax) частот как функций времени te в спектрах Pa(f,te) и Pb(f,te) соответственно. Линиями 2a и 2b обозначены траектории изменения средних  и
и  частот от времени te в спектрах Pa(f,te) и Pb(f,te) соответственно. Пользуясь простыми соотношениями вида:
частот от времени te в спектрах Pa(f,te) и Pb(f,te) соответственно. Пользуясь простыми соотношениями вида:


легко рассчитать средние скорости  и
и  для наблюдаемых компонент флюида а и b.
для наблюдаемых компонент флюида а и b.
На оси частот при времени te=t0=0 показаны спектры Pa(f,to) и Pb(f,to), как результат экстраполяции на нулевое время экспериментально измеряемых распределений Pa(f,te) и Pb(f,te). При условии нормировки P(f,t0)=Pa(f,t0)+Pb(f,t0) на единицу интегральные значения Pa(f,t0) и Pb(f,t0) будут отражать соответственно относительные доли флюида, характеризующиеся в потоке средними скоростями и . Таким образом, информация о скорости (фиг.10) вычисляется, по сути, из угла наклона к оси времени прямых, описывающих траекторию изменения частоты от времени te. Информация об относительной доле в общем потоке компоненты с определенной таким образом скоростью v находится из вклада этой компоненты в нормированную на единицу функцию P(f,t0), полученную путем экстраполяции на нулевое время экспериментально измеряемых функций P(f,te).
Таким образом, способ получения информации о скоростях потока компонент и фаз флюида включает измерения, по меньшей мере, двух сигналов эхо в условиях действия градиента магнитного поля и Фурье-преобразование этих измерений в частотные спектры, последующий двумерный анализ частотных спектров с целью получения информации о зависимостях частоты и амплитуды компонент сигнала от времени, из которой по зависимостям частоты от времени находят скорости, по зависимостям амплитуд от времени - ЯМР-характеристики (времена релаксации), а по экстраполированным на нулевое время значениям амплитуд - относительные доли компонент и фаз флюида с определенными значениями скоростей. На основании полученных с датчика ЯМР данных, включая данные об отношении газ/жидкость, а также дополнительных данных, полученных с другого датчика (например, датчика ЭПР (на фиг.1, 2 не показан)), о содержании в текущем флюиде нефти, вычисляют по заданным алгоритмам полную функцию распределения скоростей в потоке по компонентам и фазам флюида. По полученной функции распределения скоростей вычисляют все необходимые характеристики потока: мгновенные и средние за заданный промежуток времени скорости потока компонент и фаз флюида, а также мгновенные и средние значения для их относительных долей. Для перерасчета доли газа в текущем флюиде на нормальные условия используются показатели датчиков температуры и давления (на фиг.1, 2 не показаны), входящие в состав устройства.
Предлагаемые способ и устройство для его осуществления просты, точны и имеют возможность работы в широком спектре скоростей, в том числе и максимальных, и различных фазовых сочетаниях способа и устройства для измерения скорости потока флюида в трубопроводе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ядерного магнитного каротажа и устройство для его реализации | 2016 |
|
RU2645909C1 |
| ЯМР СПЕКТРОСКОПИЯ С ИСПОЛЬЗОВАНИЕМ СРЕДСТВА ЯМР С ГРАДИЕНТНЫМ ПОЛЕМ | 2003 |
|
RU2251097C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КЕРНОВ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2020 |
|
RU2747741C1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2018 |
|
RU2679630C1 |
| J-СПЕКТРОСКОПИЯ В СТВОЛЕ СКВАЖИНЫ | 2003 |
|
RU2350985C2 |
| ИНТЕГРАЦИЯ ВО ВРЕМЕННОМ ИНТЕРВАЛЕ ДАННЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ ЭХО-СИГНАЛОВ ПРИ РАЗЛИЧНЫХ ЗНАЧЕНИЯХ ГРАДИЕНТА И ВРЕМЕНИ МЕЖДУ ЭХО-СИГНАЛАМИ | 2004 |
|
RU2354989C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ЖИДКОФАЗНЫХ И ТВЕРДОТЕЛЬНЫХ КОМПОНЕНТ В СМЕСИ УГЛЕВОДОРОДОВ | 2008 |
|
RU2383884C1 |
| ИМПУЛЬСНАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ САМОДИФФУЗИИ МЕТОДОМ ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА | 2012 |
|
RU2517762C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПЛАСТОВОГО ФЛЮИДА ПРИ ЯДЕРНО-МАГНИТНОМ КАРОТАЖЕ | 2006 |
|
RU2393509C2 |
| УСТРОЙСТВО СКВАЖИННОЙ ЛАБОРАТОРИИ ДЛЯ ИССЛЕДОВАНИЯ СКВАЖИННОГО ФЛЮИДА | 2021 |
|
RU2769258C1 |

Использование: для измерения скорости потока многофазного флюида при помощи регистрации сигнала ядерного магнитного резонанса (ЯМР). Сущность изобретения заключается в том, что измерение скорости потока многофазного флюида при помощи регистрации сигнала ядерного магнитного резонанса (ЯМР) в условиях действия градиента магнитного поля, направленного вдоль направления потока, и последующего преобразования измеренного сигнала в частотный спектр осуществляется путем возбуждения ядер только в части приемной катушки - в объеме слоя, ориентированного поперек потока и характеризующегося малой толщиной по сравнению с размером рабочей зоны приемной катушки вдоль направления потока, при этом время регистрации, длину приемной катушки и проходное сечение трубопровода подбирают такими, чтобы за время регистрации сигнала при максимальной скорости фаз потока флюидов этот слой не выходил за пределы рабочей зоны данной катушки. Технический результат: обеспечение возможности создания простого и точного способа и устройства для измерения скорости потока флюида в трубопроводе, работающего в широком диапазоне скоростей и фазовых составов флюида. 2 н. и 6 з.п. ф-лы, 10 ил.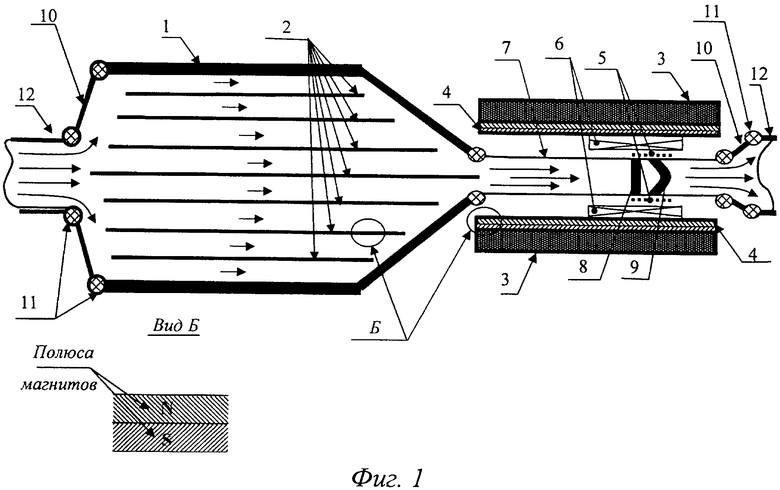
1. Способ измерения скорости потока многофазного флюида при помощи регистрации сигнала ядерного магнитного резонанса (ЯМР) в условиях действия градиента магнитного поля, направленного вдоль направления потока, и последующего преобразования измеренного сигнала в частотный спектр, отличающийся тем, что, с целью повышения точности результатов измерений и минимизации искажающего амплитуду сигнала эффекта втекающего/вытекающего флюида из рабочей зоны приемной катушки, первоначальное возбуждение ядер осуществляют только в части приемной катушки - в объеме слоя, ориентированного поперек потока и характеризующегося малой толщиной по сравнению с размером рабочей зоны приемной катушки вдоль направления потока, при этом время регистрации, длину приемной катушки и проходное сечение трубопровода подбирают такими, чтобы за время регистрации сигнала при максимальной скорости фаз потока флюидов этот слой не выходил за пределы рабочей зоны данной катушки.
2. Способ по п.1, отличающийся тем, что зону первоначального возбуждения ядер в виде слоя формируют в начале приемной катушки - со стороны втекающего потока флюида, благодаря взаимному расположению приемной и градиентной (или передающей) катушек.
3. Способ по п.1 или 2, отличающийся тем, что, с целью повышения точности результатов измерений и минимизации эффекта некорректности операции Фурье-преобразования в условиях переменной частоты, время регистрации сигнала эхо минимизируют.
4. Способ по п.1 или 2, отличающийся тем, что, в условиях градиента магнитного поля формируют два и более сигналов эхо в разные моменты времени, которые с целью повышения точности результатов измерений регистрируют в максимально одинаковых условиях, далее для этих сигналов выполняют Фурье-преобразование и судят о скоростях составляющих потока по разнице в частотных сдвигах спектральных линий, то есть по зависимости частоты от времени формирования сигнала эхо.
5. Способ по п.1 или 2, отличающийся тем, что, с целью получения информации о зависимостях частоты и амплитуды от времени для отдельных компонент сигнала и использования этой информации в окончательных расчетах характеристик текущего флюида, полученные для разных времен формирования сигнала эхо частотные спектры подвергают двумерному анализу, из которого по зависимостям частоты от времени находят скорости, по зависимостям амплитуд от времени - дополнительные характеристики состава и свойств флюида, а по экстраполированным на нулевое время значениям амплитуд - относительные доли компонент и фаз флюида с определенными значениями скоростей.
6. Устройство для осуществления способа, содержащее трубопровод для потока многофазного флюида, корпус с магнитной системой для поляризации ядер и датчиком, работающим на явлении ЯМР, электронные блоки градиента, передатчика и приемной системы; электронную систему управления, сбора и хранения информации; процессор для обработки поступающей информации по заданным алгоритмам, датчики давления и температуры, а также предполяризующую магнитную систему, отличающееся тем, что предполяризующая магнитная система выполнена в виде параллельных пластин из магнитного материала, расположенных в поперечном сечении внутри корпуса, одновременно выполняющего роль трубопровода, и сориентированных по потоку флюида, причем силовые линии магнитного поля, создаваемые внутренними слоями, максимально эффективно замыкаются на полюса магнитов соседних слоев, создавая заданное распределение плотности силовых линий в зазорах между слоями.
7. Устройство по п.6, отличающееся тем, что, с целью упрощения и облегчения конструкции предполяризующей магнитной системы, корпус выполнен из материала с высокой магнитной проницаемостью (например, железо).
8. Устройство по п.6, отличающееся тем, что, с целью повышения эффективности внешнего магнитопровода, корпус дополнительно окружен проволочным или листовым материалом с соответствующими ему магнитными характеристиками.
| US 6046587 A, 04.04.2000 | |||
| US 6452390 B1, 17.09.2002 | |||
| US 2006020403 А1, 26.01.2006 | |||
| Способ измерения скорости (расхода) жидкости методом ЯМР | 1983 |
|
SU1673847A1 |
| Способ измерения скорости течения жидкости | 1989 |
|
SU1727084A1 |
| Устройство для измерения скорости течения жидкостей | 1968 |
|
SU494678A1 |

