Известны буровые самоходные каретки с дистанционным управлением. Однако тамие буровые каретки не могут быть эффективно использованы вследствие большого количества вспомогательных операций.
Предлагаемая буровая каретка отличается от известных тем, что в «ей применена тележка с траверсой и гидродомкратами для перемещения манипуляторов по двум взаимщо-перпендикулярным направлениям и четырехзвенный корректировщик для обеспечения заданного направления щпуров. Такое выполнение каретки обеспечивает повышение производительности труда.
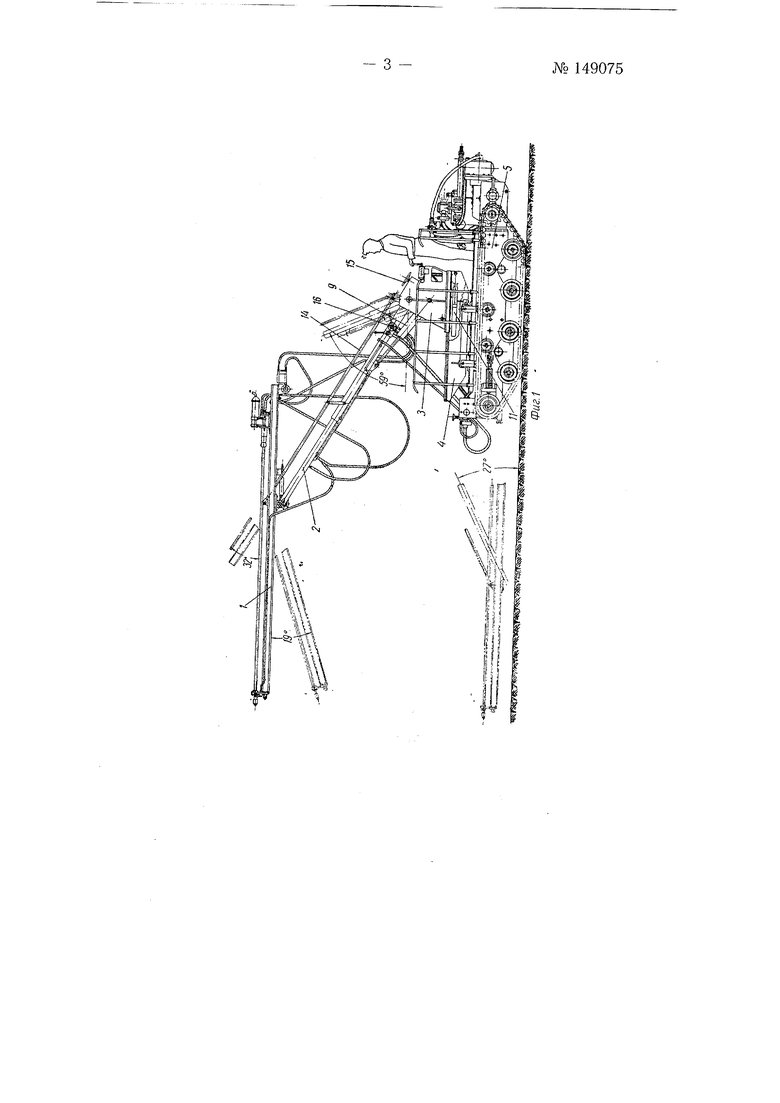
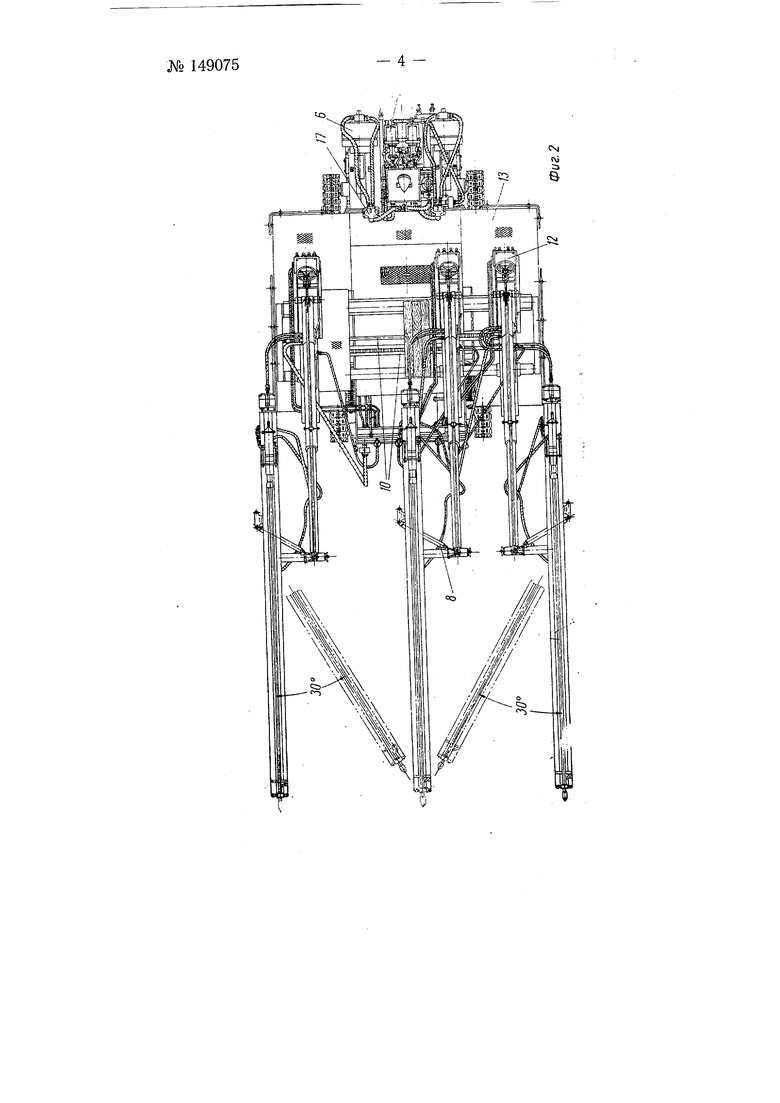
На фиг. 1 изображена буровая каретка, вид сбоку; на фиг. 2 - то же, в плане.
Буровая каретка состоит из группы бурового оборудования, содержащей автоподатчики с пер1сЬораторами /, стреловидные манипуляторы 2, опоры манипуляторов 3, траверсы 4; группы ходового оборудования, с помощью которого происходит перемещение каретки, включающей в себя самоходную гусеничную тележку 5 с двумя реверсивными нневмодвигателями 6; из группы вспомогательных механизмов, с помощью которых осуществляются вспомогательные настроечные операции, состоящей из силовой маслостанции 7, приводимой в действие пневмодвигателем, гидроцилиндров 8, 9, 10 и 11, пультов управления 12 и гидрокоммуникации.
Оперируя рукоятками пультов, бурильщик, находящийся на ходовом мостике 13, производит любое перемещение автоподатчиков в пространстве в пределах конструктивных возможностей каретки.
С помощью гидроцилиндров 8 осуществляется поворот автоподатчиков вокруг вертикальной оси на угол ±30°, гидроцилиндров 9 - подъем и спуск стреловидного .манипулятора на угол до 55°, гидроци№ 149075- 2
линдров W - перемещение траверс по специальным направляющим поперек каретки на расстояние до 1300 мм, гидроцилиндров 11 перемещение, опор манипулятором вдоль траверс параллельно длине оси каретки на расстояние до 900 мм.
Поворот автоподатчиков в вертикальной плоскости производится с помощью тяги 14 и маховичка 15.
Тяга 14 совместно с конструкцией манипулятора образует четырехзвенный корректировщик, с помощью которого автоподатчик перемещается в пространстве параллельно первоначально установленному положению при подъеме и опускании манипулятора. Пуск в работу nejiфоратора, автоподатчика и подача воды для промывки щпура осущесгвляются с помощью кранов 16. Благодаря наличию двух взаимно-перпендикулярных направляющих, по которым перемещаются манипуляторы с автоподатчиками, каретка обладает возможностью обуривать с одной позиции забой любого сечения по форме.
При движении каретки управление пневмодвигателями 6 производится кранами 17, установленными таким образом, что при движении каретки вперед и назад бурильщик может занять любое, удобное для него положение стоя и смотреть вперед по ходу.
Предмет изобретения
Буровая самоходная каретка с дистанционным управлением, отличающаяся тем ,что, с целью увеличения производительности труда, В ней применена тележка с гидродомкратами для перемещения манипуляторов по двум взаимно-перпендикулярным направлениям и четырехзвенный корректировщик для обеспечения заданного направления щпуров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Легкий буровой станок | 1960 |
|
SU140398A1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |