;о
со 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации движения глаз | 1981 |
|
SU1009418A1 |
| Электронно-копировальный прибор | 1980 |
|
SU924654A1 |
| Устройство для регистрации движений глаз | 1980 |
|
SU891063A1 |
| Блок измерения разности граничных токов развертки | 1976 |
|
SU682759A1 |
| Кинотелевизионная камера | 1987 |
|
SU1559429A1 |
| ТЕЛЕВИЗОР | 1994 |
|
RU2120194C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2000 |
|
RU2197070C2 |
| Электронно-копировальный прибор | 1983 |
|
SU1125594A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 1993 |
|
RU2096925C1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1979 |
|
SU955179A1 |
Изобретение касается оценки зрительной деятельности оператора и может быть использовано для ее анализа, например, при проведении эргонометрической экспертизы. Сущность изобретения состоит в устранении систематической ошибки слежения, обусловленной запаздыванием видеосигнала, вносимого аналоговыми узлами устройства. В устройство введен блок 10 компенсации запаздывания, содержащий источник 11 компенсирующего сигнала, ключи 12, 13 и суммирующие усилители 14, 15, включенные в цепи формирования координатных разверток. Компенсация запаздывания осуществляется скачкообразным изменением тока в отклоняющих катушках в момент переключения координаты развертки, когда апертура, двигаясь по кресту, проходит точно через центр изображения роговичного блика. Это позволяет осуществлять измерение направления взгляда при любых возможных скоростях движения глаза без каких-либо ограничений. 3 ил.
(D.f
ISJ
Изс)б)етение относится к технике эргономических исследований, касается вонросов оценки ;фите. 1ьной деятельности оператора, может быть ис11о. 1ьзовано для ее ана.чиза, например, при пронедении эргономической экспертизы пультов управления приборных панелей, кабин транснортных средств и т.п. для их наиболее рациональной компоновки и является усовершенствованием устройства по авт. св. № 1009418.
Цель изобретения - расширение диапазона исследований путем обеспечения возможности работы во всем физиологическом диапазоное скоростей движения глаза и устранения эксцентриситета следящего растра.
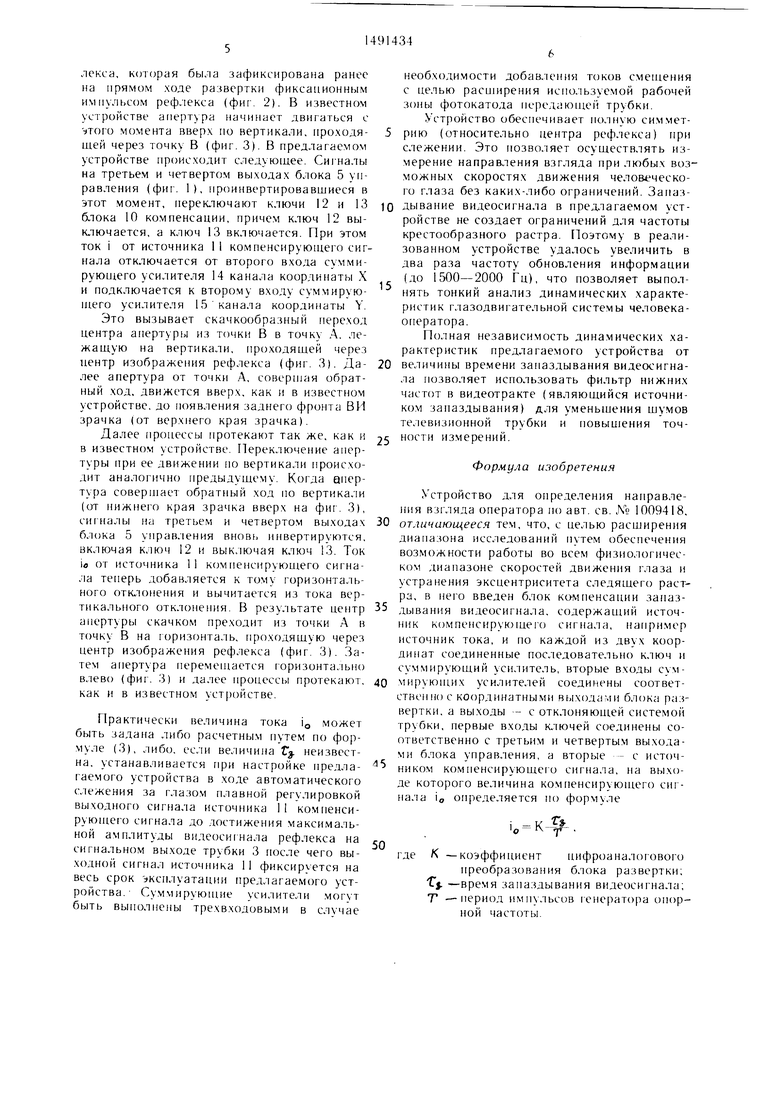
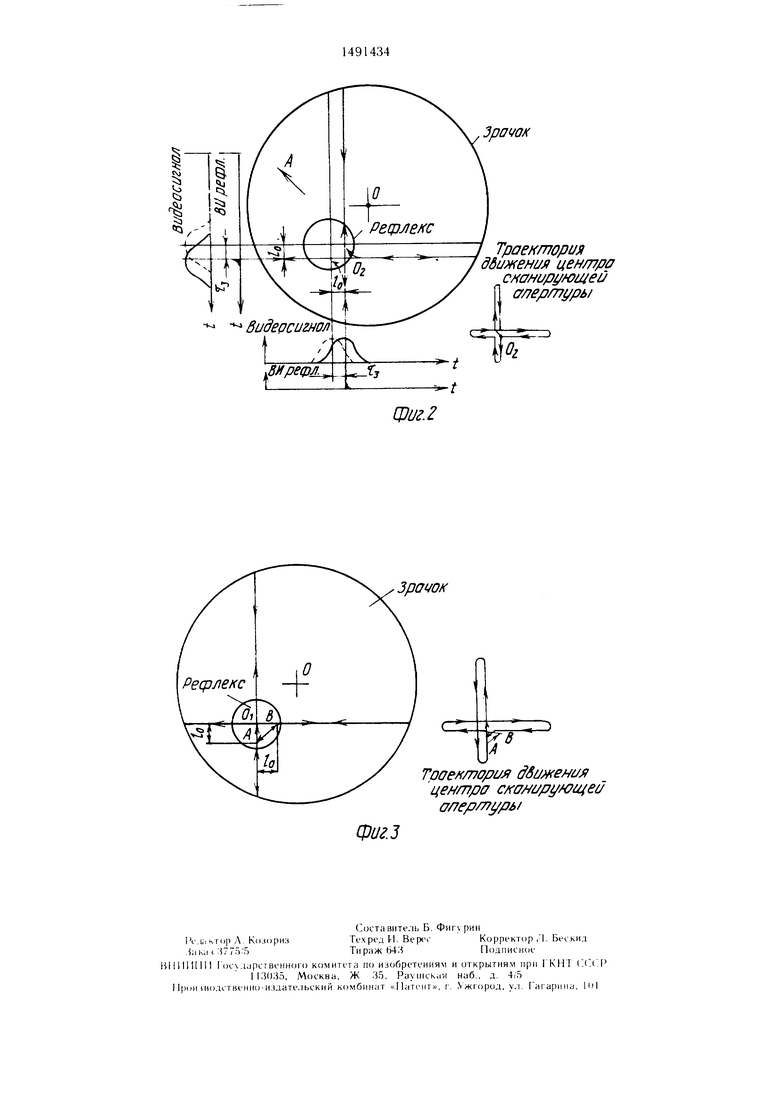
На фиг. 1 приведена функциональная схе ма устройства для определения направления взгляда оператора; на фнг. 2 - траектория движения сканирующей апертуры в известном устройстве; на фиг. 3 то же, в нредла- гаемом уст)ойстве.
Устройсгво содержит оптически связанные осветитель 1. оптический блок 2 и нере- даюшую те.чевнзионнук) трубку 3, а также б;1ок 4 формирования видеоимпульсов, первый вход которого соединен с выходом пере- даюп1е11 те.ревизионной трубки 3, а первый, второй и трет nil выходы - с первым, вторым и третьим входом блоки Г) управления, первый, второй, г|Н 1пй и четвертый ны- ходЬ) KOTopi.Mo соединены с первым, вторьз1м , т)етьим н четвертым входами блока 6 разверток, а пятый, шестой и седьмой с первым, вторым и третьим входами арифметического блока 7. четвертый, пятый входы которого соедипе11ь; соответственно с третьим н четвертым выходом блока 5 управления, генератор 8 опорной частоты сое- динен с пятым входом б, 1ока 6 разверток, шестым входом арифметического блока 7 и четвертым входом блока 5 управления, второй вход которого через pe,:ie 9 включения поисковой развертки соединен с шестым входом блока 6 разверток, седьмым входом арифметического б. юка 7 и пятым входом блока 5 управления.
Блок 10 компенсации запаздывания видеосигнала содержит источник 11 компенсирующего сигнала, например источник тока, и по каждой из двух координат соединенные последовательно ключи 12 и 13 н суммирующие усилители 14 и 15, вторые входы которых соединены соответственно с координатными выходами X и Y б, 1ока 6 разверток, а выходы - с отклоняющей системой трубки ii, первые входы ключей 12 и 13 подключены соответственно к третьему н четвертому выходам блока 5 управления, осуществляющим переключения координатных счетчиков блока 6 разверток и сканирование развертки по ко- ординате X и Y. Вторые входы ключей 12 и 13 подключены к источнику 11 компенсирующего сигна,та.
.
Устройство работает следующим обра
:и)м.
Алгоритм работы устройства обеспечивает устранение систематической ошибки слежения (асимметрии), обусловленной запаздыванием видеосигнала (фиг. 2), вносимого аналоговыми узлами устройства. Для этого введены средства, обеспечивающие увеличение длины обратного хода сканирующей апертуры на величину Ео, пропорциональную запаздыванию относительно точки, соответствующей моменту появления фиксационного импульса рефлекса, совпадающего по времени с верп1иной запаздываюп1,его видеосигнала. Компенсация запаздывания про- движеппем апертуры на величину 1 осуществляется таким скачкообразным изменением тока в отклоняющих катушках на величину io в момент переключения координаты развертки, при котором апертура, двигаясь по кресту, проходит точно через центр изображения роговичного блика (фиг. 3).
Определяют необходимую величину токовой добавки io. Времени запаздывания Т| соответствует nj тагов развертки
-Г )
где Т-период генератора импульсов опорной частоты. Очевидны следующие соотношения:
.к jC
П {L
,
ШКв
Т „
mexi
к,. (2)
О 5 д
5
5
0
L/TKiKe
,,
V mai« ц. Г .Г
(3)
Imate
,.о-смещение апертуры и ток отклонения, соответствующие времени запаздывания;
mert/maKc,-наибольп ие величины числа в счет- пам чнках блока развертки, а также соответствующих тока отклонения и величина отклонения анертуры; KI,K -коэффициент цифроаналогового
преобразования.
Предлагаемое устройство с точки зрения алгоритма, последовательности и моментов переключения элементов работает аналогично известному устройству. Отличие заключается только в траектории движения центра сканирующей апертуры в режиме слежения (фиг. 3), что обеспечивается введением блока 10 компенсации запаздывания видеосигнала. Этот блок обеспечивает скачкообразное изменение тока отклонения, а следовательно, скачкообразное перемещение апертуры на участке АВ (фиг. 3).
Рассмотрим этот процесс с того .момента, когда апертура движется горизонтально от правого края зрачка (фиг. 3) в обратном направлении. Апертура доходит до точки В рефлекса, которая была зафиксирована ранее на прямом ходе развертки фиксационным импульсом реф;1екса (фиг . 2). В известном устройстве апертура начинает двигаться с -лого момента вверх но вертикали, нроходя- щей через точку В (фиг. 3). В предлагаемом устройстве происходит следующее. Сигналы на третьем и четвертом выходах блока 5 управления (фиг. 1), проинвертировавшиеся в этот момент, переключают ключи 12 и 13 блока 10 компенсации, причем ключ 12 выключается, а ключ 13 включается. При этом ток i от источника 1 1 компенсируюп1его сигнала отключается от второго входа су.мми- руюи1его усилителя 14 канала координаты X и подключается к второму входу суммирую- niero усилителя 15 канала координаты Y.
Это вызывает скачкообразный переход центра апертуры из точки В в точку А. лежащую на вертикали, проходящей через центр изображения рефлекса (фиг. 3). Далее апертура от точки А, соверп ая обратный ход, движется вверх, как и в известном устройстве, до появления заднего фронта ВИ зрачка (от верхнего края зрачка).
Далее процессы протекают так же, как и в известном устройстве. Переключение апертуры при ее движении ю вертикали происходит аналогично предыдущему. Когда апертура совершает обратный ход по вертикали (от нижнего края зрачка вверх на фиг. 3|, сиг налы на третьем и четвертом выходах блока 5 управ.чения вновь инвертируются, включая ключ 12 и выключая ключ 13. Ток ie от источника 11 компенсирующего сигнала теперь добавляется к тому горизонтального отклонения и вычитается из тока вертикального отклонения. В результате центр апертуры скачком преходит из точки А в точку В на горизонталь, проходящую через центр изображения рефлекса (фиг. 3). Затем апертура перемещается оризонтально влево (фиг. 3) и далее процессы протекают, как и в известном устройстве.
Практически величина тока ig может быть задар{а либо расчетным путем по формуле (3), либо, если величина Г. неизвестна, устанавливается при настройке предлагаемого устройства в ходе автоматического слежения за глазом плавной регулировкой выходного сигнала источника 11 компенсирующего сигнала до достижения максимальной амплитуды видеосигнала рефлекса на сигнальном выходе трубки 3 после чего выходной сигнал источника 11 фикcиpveтcя на весь срок эксплуатации предлагаемого устройства. Суммирующие усилители могут быть выполнены трехвходовыми в случае
5
необходи.мости добавления токов смешения с целью расширения используемой рабочей зоны фотокатода передающей трубки.
Устройство обеспечивает полную си.ммет- 5 рию (относительно центра рефлекса) при слежении. Это позволяет осуществ,1ять измерение направления взгляда при любых возможных скоростях движения человеческого глаза без каких-либо ограничений. Заназ0 дывание видеосигнала в предлагаемо.м устройстве не создает ограничений для частоты крестообразного растра. Поэтому в реализованном устройстве удалось увеличить в два раза частоту обновления информации (до 1500-2000 Гц), что позволяет выполнять тонкий анализ динамических характеристик глазодвигательной системы человека- оператора.
Полная независимость дина.мических характеристик пред.тагаемого устройства от
0 величины вре.мени заназдывания видеосигнала позволяет использовать фильтр нижних частот в видеотракте (являющийся источником запаздывания) для уменьшения щумов телевизионной трубки и повыи ения точ5 ности измерений.
Формула изобретения
Устройство для определения направления взгляда оператора по авт. св. Х 1009418, 0 отличающееся тем, что, с целью расщирения диапазона исследований путем обеспечения возможности работы во всем физиологическом диапазоне скоростей движения глаза и устранения эксцентриситета следящего растра, в него введен блок компенсации запаз5
дывания видеосигнала, содержащий источ
ник компенсирующе|-о сигнала, например источник тока, и по каждой из двух коор- соединенные пос,тедовательно ключ и суммирующий усилитель, вторые входы сум- мируюпщх усилителей соединены соответственно с координатными .выходами блока развертки, а выходы -- с отклоняющей системой трубки, первые входы ключей соединены соответственно с третьим и четвертым выходами блока управления, а вторые - с источником компенсирующего сигнала, на выходе которого величина компенсирующего сиг- р(ала io определяется по формуле
,
где К -коэффициент цифроа налогового преобразования блока развертки; Tj. -время запаздывания видеосигнала; Т -период импульсов генератора опорной частоты.
Видерсигнал
t i
БИрефл
)
е-
- -- -t-t J
dpuvox
Траектория дбиженил цен/77дд снанир /ющеи 1 алер/лурь/
Троем/лорил dSu sHi/A ценшра c/ c7HL/pi//cafee} илер/7 1/рА/
| Устройство для регистрации движения глаз | 1981 |
|
SU1009418A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
