Изобретение относится к области приборов, предназначенных для преобразования электромагнитного излучения в электрический сигнал, несущий информацию об изображении, при размещении этих приборов на подвижном основании. Примерами таких приборов могут служить, например, субмиллиметровые телескопы, теплопеленгаторы, тепловизоры, телекамеры, визуализаторы рентгеновского излучения. Как правило, в таких приборах используется одно- или многоэлементные приемники сигнала, а для получения стандартного видеосигнала используется память на кадр или его часть, например полукадр.
Известен способ стабилизации изображения, заключающийся в том, что на корпус оптико-электронного прибора устанавливают силовые гироскопы, которые при воздействии качек обеспечивают удержание прибора в установленном направлении за счет развиваемого ими гироскопического момента [1, стр. 95]. Недостатком этого способа является необходимость использования гироскопов с высоким кинетическим моментом, которые имеют большую массу и габариты.
Известен также способ стабилизации, описанный в [2]. При этом способе в оптическую систему оптико-электронного прибора устанавливают подвижный оптический элемент, позволяющий смещать формируемое изображение относительно устройства, преобразующего электромагнитное излучение в электрический сигнал. Перемещение подвижного оптического элемента осуществляют с помощью управляемого привода. Недостатком такого способа стабилизации изображения является то, что дополнительный подвижный оптический элемент вносит потери в прохождение потока излучения и тем самым ухудшает пороговую чувствительность оптико-электронного прибора, кроме того, наличие дополнительного привода усложняет конструкцию оптико-электронного прибора.
В [3, стр. 76-79] описан способ стабилизации изображения, когда в нем выделяются неподвижные реперные точки, осуществляется их привязка к растру, в каждом полукадре определяется их положение, и за счет сигнала смещения на отклоняющую систему, пропорционального изменению положения реперных точек относительно первоначального, положение центра растра остается стабильным в пространстве. Этот способ обладает следующими недостатками: во-первых, изображение должно быть типовым и располагаться на постоянном от оптико-электронного прибора расстоянии либо оптико-электронный прибор должен иметь систему регулирования фокусного расстояния, которая обычно увеличивает массу прибора и ухудшает его оптические характеристики; во-вторых, для выделения реперных точек требуется достаточно сложная аппаратура для обработки видеосигнала; в-третьих, при достаточно большой амплитуде качек часть реперных точек может выйти за пределы растра, что может сорвать дальнейший процесс стабилизации, в-четвертых, смещение можно осуществить только в следующем кадре (полукадре), то есть возникает ошибка стабилизации изображения из-за дискретности обновления информации о смещении.
Еще одним способом стабилизации изображения является способ, описанный в [4] . В оптико-электронной системе по этой заявке перемещение измеряется с помощью акселерометра (измерителя смещения), а соответствующая коррекция изображения осуществляется за счет изменения порядка считывания элементов с матрицы приборов с зарядовой связью (ПЗС). Но эта система может быть применена лишь в приборах, где в качестве преобразователя излучения в электрический сигнал используются ПЗС приемники. Кроме того, поскольку изображение до считывания должно быть записано в ПЗС, возникает временной лаг между моментом формирования первичного электрического сигнала от потока излучения и моментом получения сигнала от измерителя смещения (ИС). В результате также возникают ошибки в стабилизации изображения.
Наиболее близким к заявляемому техническому решению является способ, предложенный в [5] . В этом случае для стабилизации изображения измеряют смещение оптико-электронного прибора (телекамеры), для каждого элемента изображения определяют адрес в запоминающем устройстве с учетом измеренного смещения, записывают в запоминающее устройство элементы изображения в соответствии с полученными адресами, а считывание элементов изображения осуществляют в обычной последовательности, соответствующей развертке растра. Недостатком этого способа является то, что при наличии запаздывания в формировании видеосигнала будут возникать ошибки стабилизации даже при идеальном определении величины смещения изображения. Кроме того, могут возникать дополнительные ошибки из-за того, что не учитываются несовпадения измерительных осей ИС с направлениями развертки и нелинейные искажения, вносимые формирующей оптическое изображение системой.
Известна система стабилизации [6, стр. 182-186, рис. 3.1], содержащая датчики состояния объекта стабилизации, датчики возмущений, действующих на него, управляемые органы, вызывающие перемещения объекта стабилизации, и датчики управляемых органов, а также управляющую машину, которая на основе полученной информации формирует необходимые воздействия на управляемые органы. Такая система позволяет пересчитать измеренные смещения на любое требуемое направление. Но при использовании ее для стабилизации изображения требуется использование мощных приводов для поворота оптико-электронного прибора, которые обладают относительно низкой надежностью и имеют существенные ошибки при динамичных воздействиях на объект управления.
В системе стабилизации изображения [7] для коррекции положения изображения используют подвижный оптический элемент, установленный в формирующей оптической системе. В качестве измерителя смещения используют устройство обработки видеосигнала, по сигналам которого и перемещается подвижный оптический элемент. К недостаткам этой системы можно отнести как и относительно низкую надежность приборного привода (хотя и более высокую, чем силового), так и то, что при наличии запаздывания в формировании видеосигнала корректирующий сигнал также будет формироваться с запаздыванием. А это неизбежно вызовет появление ошибок стабилизации изображения.
Наиболее близкой по числу совпадающих признаков авторами признана оптико-электронная система, описанная в [5] . Она состоит из телекамеры (оптико-электронного прибора), установленной на платформе, кинематически связанной с двигателями и датчиками сдвига (измерителями смещения). На двигатели подаются сигналы управления, сформированные каналом слежения. Вход канала слежения соединен с выходом запоминающего устройства. Вход данных запоминающего устройства соединен с видеовыходом телекамеры, а входы формирователя адреса записи - с выходами датчиков сдвига. Запоминающее устройство в этой системе выполняет функции блока смещения изображения. Недостатком этой системы является наличие существенных ошибок в стабилизации изображения при задержке формирования видеосигнала, наличие дополнительных ошибок из-за неучета несовпадения измерительных осей измерителя смещения с направлениями развертки оптико-электронного прибора (ОЭП) и неучета нелинейностей формирующей изображение оптической системы и системы развертки ОЭП. В результате создаются дополнительные трудности как для работы канала слежения, так и для наблюдения за процессом слежения оператором.
Задачей предлагаемой группы изобретений является уменьшение погрешности стабилизации изображения, выдаваемого оптико-электронными приборами, имеющими запаздывание в формировании видеосигнала относительно момента попадания потока излучения на фотоприемник, а также уменьшение влияния на точность стабилизации изображения нелинейных искажений, вносимых оптико-электронным прибором.
Для решения указанной задачи способ стабилизации изображения, заключающийся в преобразовании потока излучения в видеосигнал, измерении смещения изображения, формировании адреса записи с учетом замеренного смещения, запоминании элементов видеосигнала в соответствии с полученными адресами и считывании запомненного сигнала в последовательности, соответствующей закону развертки, модифицирован следующим образом: для формирования адреса записи измеренное смещение задерживают на время, равное запаздыванию в формировании видеосигнала, и пересчитывают на направление развертки с учетом нелинейностей ОЭП.
Стабилизация изображения при предложенном способе осуществляется нижеописанным образом.
В качестве измерителя смещения могут использоваться акселерометры, гироскопические датчики угла, датчики угловых скоростей, лазерные и волоконно-оптические гироскопы и т.п. В общем случае направление развертки оптико-электронного прибора может не совпадать с плоскостью, в которой осуществляется измерение перемещения. Так, например, гироскопические приборы, как правило, измеряют перемещение в абсолютной системе координат, а прибор может находиться в подвесе, ориентированном иначе, чем оси гироскопа. Кроме того, в оптико-электронном приборе может использоваться неортогональная, например спиральная, развертка и, как правило, оптико-электронный прибор имеет нелинейности формирующей изображение и отклоняющей систем, приводящие к тому, что поле растра становится нелинейным. Для приведения в соответствие измеренных величин направлению развертки идеального растра, они должны быть пересчитаны на соответствующее направление с учетом нелинейностей оптико-электронного прибора. Эти нелинейности могут быть предварительно измерены по эталонным изображениям (тест-таблицам). Зависимости, по которым может быть произведен пересчет из одной системы координат в другую, приведены, например, в [8]. Компенсация нелинейностей может быть осуществлена, например, с помощью функционального преобразователя, реализующего функцию, обратную функции, аппроксимирующей нелинейность, если та определяется в виде аналитического выражения, либо умножением на обратную матрицу, если для каждой точки идеального растра замерено фактическое отклонение. Может также использоваться и комбинация этих двух способов, если удовлетворительные по точности аппроксимации могут быть получены для ограниченных областей растра (кусочно-линейная аппроксимация, в частности). В частном случае, например, когда используются ортогональная развертка и гироскопический датчик угла, закрепленный на оптико-электронном приборе таким образом, что направления измеряемых им перемещений совпадают с направлениями развертки, а формирующая и развертывающая системы идеальны, преобразование координат редуцируется к масштабированию. Однако, если при формировании видеосигнала имела место задержка (см. , например [9, стр. 32-40, 62-63]), то величина поправки будет сформирована с опережением по отношению к получаемым элементам (пикселам) видеосигнала. Это приведет к тому, что адреса записи будут сформированы неточно, а соответственно стабилизация изображения будет иметь погрешности. Чтобы избежать этого, вводится задержка на использование замеренного сигнала смещения на время, равное запаздыванию в формировании видеосигнала. Указанную задержку в общем случае нецелесообразно устанавливать после пересчета смещения на направление развертки либо формирования адреса записи, т.к. эти операции тесно связаны с положением пиксела в растре, хотя в некоторых частных случаях такая перестановка последовательности операций допустима. Таким образом адрес записи поступающего пиксела видеосигнала с учетом вводимой задержки соответствует такому его идеальному положению в растре на момент попадания потока излучения на фотоприемник, как, если бы на оптико-электронный прибор не действовали возмущения. Поэтому, производя считывание пикселов из памяти в последовательности, соответствующей развертке идеального растра, получим изображение, стабилизированное относительно оптической оси, связанной с центром растра.
Для реализации описанного способа в оптико-электронную систему, содержащую измеритель смещения и последовательно соединенные оптико-электронный прибор и блок смещения, введены последовательно соединенные блок задержки и преобразователь координат, при этом выход измерителя смещения соединен со входом блока задержки, а выход преобразователя координат соединен со вторым входом блока смещения.
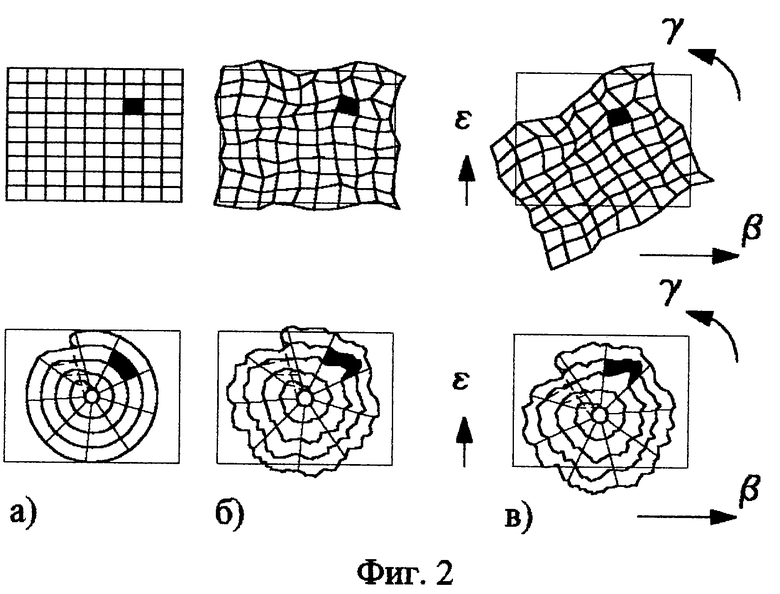
Предлагаемые изобретения поясняются графическими материалами. На фиг.1 изображена функциональная схема предлагаемой оптико-электронной системы (ОЭС). На фиг.2 схематично приведены положения растров в плоскости изображений (для ортогональной и спиральной разверток): а - идеального; б - с учетом нелинейностей; в - с учетом смещений.
ОЭС состоит из последовательно соединенных оптико-электронного прибора (ОЭП) 1 и блока смещения (БСм) 2, а также из последовательно соединенных измерителя смещения (ИС) 3, блока задержки (БЗ) 4 и преобразователя координат (ПК) 5. Выход преобразователя координат соединен со вторым входом блока смещения.
Все используемые в системе блоки являются по отдельности известными. В качестве оптико-электронного прибора могут использоваться субмиллиметровые телескопы, теплопеленгаторы, тепловизоры, телекамеры, визуализаторы рентгеновского излучения. Блок смещения может быть реализован аналогично прототипу. В качестве измерителей смещения могут использоваться акселерометры, датчики угловых скоростей, позиционные гироскопы, оптико-электронные координаторы, датчики приводов перемещения и поворота ОЭП и т.п. Блок задержки может быть реализован как с использованием аналоговых линий задержки, так и с использованием цифровых элементов памяти, например, за счет использования в качестве адреса считывания ранее сформированного адреса записи, взятого с соответствующим запаздыванием. Преобразователь координат также может быть выполнен с использованием аналоговой либо цифровой элементной базы. Например, реализация ПК с помощью электромеханических приводов и вращающихся трансформаторов приведена в [8]. Нелинейные элементы ПК могут быть реализованы и на операционных усилителях (см., например, [10]). Известны и микросхемы, выполняющие операцию умножения, и схемотехника, позволяющая с их помощью реализовать операцию деления (см., например, [11]).
Рассмотрим работу оптико-электронной системы.
Поток электромагнитного излучения поступает на вход оптико-электронного прибора 1, где преобразуется в видеосигнал с некоторым запаздыванием по отношению к моменту попадания излучения на фотоприемник. В случае перемещения оптико-электронного прибора, например при размещении его на подвижном носителе, изображение также сместится. Чтобы обеспечить стабилизацию изображения определяется величина сдвига с помощью измерителя смещения 3. Так как направление развертки в общем случае не совпадает с направлениями, в которых осуществляет замер измеритель смещения, в преобразователе координат 5 сигнал смещения пересчитывается на направление развертки. Применение преобразователя координат позволяет также скомпенсировать нелинейные искажения, вносимые формирующей и развертывающей системами ОЭП. Предварительно смещение, измеренное ИС 3, задерживается на величину, равную запаздыванию в формировании видеосигнала в блоке задержки 4. Полученное на выходе ПК 5 значение смещения используется для формирования адреса записи в блоке смещения 2, на вход данных которого поступает видеосигнал из оптико-электронного прибора 1. Источник сигналов, синхронизирующих работу блоков, может размещаться как в одном из них, так и отдельно.
Рассмотрим подробнее простейший частный случай, когда развертка ОЭП ортогональна, измеритель смещения измеряет углы качек в направлениях развертки и поворот относительно оптической оси ОЭП. Пусть в пространстве изображений ОЭП каждому элементу аij (i - номер строки, j - номер элемента в строке) соответствуют координаты хj, yi относительно оптической оси. Если оптическая система ОЭП идеальна, то в соответствии с законами геометрической оптики пространство предметов связывают с пространством изображений соотношения
где ε - угол в пространстве предметов относительно оптической оси в плоскости вертикальной развертки;
β - угол в пространстве предметов относительно оптической оси в плоскости горизонтальной развертки;
f - фокусное расстояние ОЭП.
Если углы качек равны соответственно εк, βк и γ (поворот вокруг оптической оси), то положение соответствующей точки в пространстве изображений можно определить по зависимости
Соответственно, чтобы "вернуть" элемент изображения в прежнюю позицию, потребуется выполнить обратный пересчет координат хjк, yiк, связанных с ОЭП, в стабилизированную систему координат
Если кроме геометрических имеют место и другие искажения так, что
тогда соответственно должны быть выполнены дополнительные преобразования
где ϕ1, ϕ2 - функции, обратные F1, F2.
Поскольку преобразование изображения в информационный сигнал осуществляется с некоторой задержкой τ относительно текущего времени t, то на вход данных блока смещения вместо текущих элементов изображения с координатами xjк(t), yiк(t) поступают пикселы с координатами xjк(t-τ), yiк(t-τ). Поэтому в зависимостях (3), (3а) следует вместо координат εк(t), βк(t) и γ(t) использовать εк(t-τ), βк(t-τ), γ(t-τ). Для чего, как это указывалось выше, координаты от измерителя качек должны запоминаться и храниться в течение интервала времени, равного τ. После того, как координаты, соответствующие стабилизированному изображению, определены, необходимо сформировать соответствующие им адреса записи. Положение пикселов в видеосигнале имеет при заданном законе развертки однозначно определенную зависимость относительно начала кадра, задаваемого обычно синхроимпульсом. Для ортогональной n-строчной развертки с периодом Т и числом пикселов в строке m можно считать справедливыми зависимости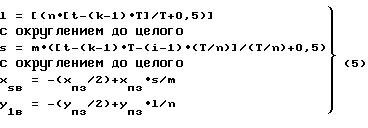
где xjв, yiв - координаты пиксела в направлениях строчной и кадровой разверток;
xпз, yпз - размеры сканируемого поля зрения в пространстве изображений;
k - номер текущего кадра;
l - номер строки в видеосигнале;
s - номер пиксела в строке.
Из (5) видно, что при известных координатах xjн(t-τ), yiн(t-τ) соответствующие им в стабилизированном изображении номер строки и пиксела в ней определяются однозначно
Очевидно, что точки, для которых s>m, s<1, l>n, l<1, должны исключаться из рассмотрения, как не принадлежащие стабилизируемому полю зрения. Если же известно положение пиксела в видеосигнале стабилизированного изображения, адрес ячейки для его записи определяется тривиально. Так, если под кадр выделен линейный массив из N=n•m ячеек, откуда последовательно построчно должны быть считаны элементы видеосигнала, то пикселу (l, s) соответствует ячейка с номером, равным ([l-1]•m + s). Если один массив используется для записи, а другой в это время для считывания, то адреса для записи массива четного кадра просто увеличиваются нa N.
Из изложенного видно, что использование способа стабилизации изображения, заключающегося в преобразовании потока излучения в видеосигнал, измерении смещения, задержке информации о смещении на время, равное запаздыванию в формировании видеосигнала, пересчете на направление развертки с учетом нелинейностей ОЭП задержанных величин, формировании адреса записи с учетом пересчитанного смещения, запоминании элементов видеосигнала в соответствии с полученными адресами и считывании запомненного сигнала в последовательности, соответствующей закону развертки, позволяет уменьшить ошибки стабилизации изображения, сформированного оптико-электронным прибором, имеющим задержку видеосигнала, при одновременном обеспечении компенсации нелинейностей оптико-электронного прибора.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Репников А.В., Сачков Г.П., Черноморский А.И. "Гироскопические системы", М., "Машиностроение", 1983, стр. 95, аналог.
2. Патент США 4731669, НКИ 358-229 (МКИ H 04 N 5/247, 5/225), 1988, аналог.
3. Петраков А.В. "Автоматические телевизионные комплексы для регистрации быстропротекающих процессов", М., "Энергоатомиздат", 1987, стр. 76-79, аналог.
4. Заявка Великобритании 2162019, НКИ H 4 F (МКИ H 04 N 5/21), 1986, аналог.
5. А. с. СССР 1592956, МКИ H 04 N 7/18, 1988, прототип способа и устройства.
6. Фрейдзон И.Р. "Судовые автоматизированные электроприводы и системы". Л., "Судостроение", 1988, стр. 182-186, аналог.
7. Патент США 4682242, НКИ 358-265 (МКИ H 04 N 1/12), 1987, аналог.
8. Ривкин С.С. "Стабилизация измерительных устройств на качающемся основании", М., "Наука", 1978.
9. Богомолов П. А. , Сидоров В.И., Усольцев И.Ф. "Приемные устройства ИК-систем". Под общ. ред. д. ф.-м.н. Сидорова В.И., М., "Радио и связь", 1987, стр. 34-40, 62, 63.
10. Тетельбаум И. И. , Шнейдер Ю.Р. "400 схем для АВМ", М., "Энергия", 1978.
11. "Применение интегральных микросхем. Практическое руководство". Под ред. А. Уильямса. Кн. 1, М., "Мир", 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2197003C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ, ФОРМИРУЕМОГО ОПТИКО-ЭЛЕКТРОННЫМ ПРИБОРОМ С МЕХАНИЧЕСКОЙ РАЗВЕРТКОЙ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156548C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБЗОРА И СОПРОВОЖДЕНИЯ | 2003 |
|
RU2237979C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251712C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
Изобретение относится к приборам, предназначенным для преобразования электромагнитного излучения в электрический сигнал, несущий информацию об изображении, при размещении этих приборов на подвижном основании. Техническим результатом является уменьшение ошибки стабилизации изображения, сформированного оптико-электронным прибором, имеющим задержку видеосигнала, при одновременном обеспечении компенсации нелинейностей оптико-электронного прибора. Технический результат достигается тем, что способ стабилизации изображения модифицирован следующим образом: для формирования адреса записи измеренные смещения задерживают на время, равное запаздыванию в формировании видеосигнала относительно момента попадания потока излучения на фотоприемник, и пересчитывают на направление развертки. Для реализации такой модификации в устройство дополнительно введены блок задержки и преобразователь координат. 2 с.п. ф-лы, 2 ил.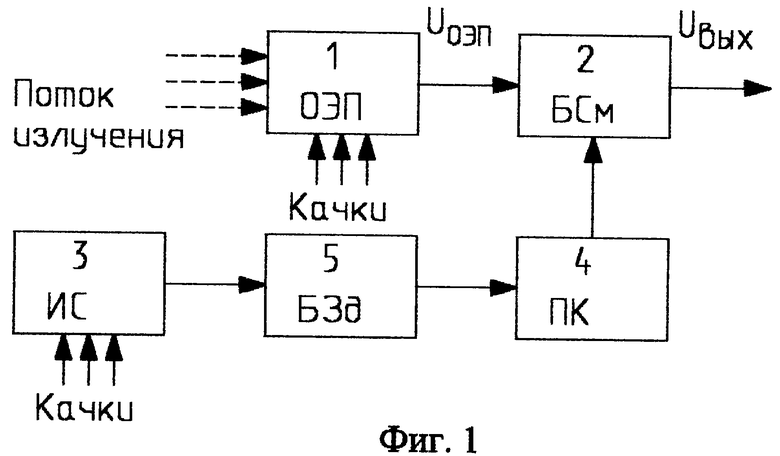
| SU 1592956, 15.09.1990 | |||
| US 4682242 A, 21.07.1987 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1994 |
|
RU2096927C1 |
| RU 2059206 С1, 27.04.1996 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

