1
(21)А279469/31--33
(22)06.07.87
(Д6) 07.07.89. Бюя.У 25
(71)Днепропетровский институт инженеров железнодорожного транспорта
им. М.И.Калинина
(72)Н.Г.Бондарь и А.Л.Закора (53) 699.84(088.8)
(56) Вибрации в технике: Справочник. Т-б.М.: Машиностроение, с.336.
1981,
///
ек.
(54) УСТРОЙСТВО ДЛЯ ГА111ЕНЙЯ КОЛЕБАНИЙ (57) Изобретение относится к строительству, в частности к гашению вынужденных гармонических колебаний строительных конструкций, и позволяет снизить энергоемкость динамического гасителя колебаний. Обратный маятник состоит из стержня I, шарнирно соединенного с демпфируемой конструкцией 2.На стержне I расположен с возможностью фиксации в разных точках по его д:зине магнит 3. В основании маятника расположена спиральная пружина 4. 2 ил. ////////////
(Л
со
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гашения колебаний | 1990 |
|
SU1778387A1 |
| Электромагнитный динамический поглотитель колебаний | 1962 |
|
SU151533A1 |
| Автоматические весы с электромагнитным уравновешиванием | 1985 |
|
SU1303837A1 |
| ДАТЧИК МАГНИТОМЕТРА | 2005 |
|
RU2287837C1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ КОНСТРУКЦИЙ, ИЗГОТОВЛЕННЫХ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 1992 |
|
RU2029160C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 2008 |
|
RU2377506C1 |
| ГИДРОПНЕВМАТИЧЕСКИЙ ДЕМПФЕР | 2001 |
|
RU2216665C2 |
| Устройство для возбуждения колебаний маятника Фуко | 1941 |
|
SU65446A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДЕТЕКТОР ОБЪЕКТА ТОЛКАЮЩЕГО И УДАРНОГО ТИПА | 2012 |
|
RU2558715C2 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
Изобретение относится к строительству ,в частности, к гашению вынужденных гармонических колебаний строительных конструкций, и позволяет снизить энергоемкость динамического гасителя колебаний. Обратный маятник состоит из стержня 1, шарнирно соединенного с демпфируемой конструкцией 2. На стержне 1 расположен с возможностью фиксации в разных точках по его длине магнит 3. В основании маятника расположена спиральная пружина 4. 2 ил.
цзиг.
Ичобретение относится к строитель ству, и час 1 нести к гашению вынужденных гармонических колебаний строительных конструкций,
Целью изобретения является снижение энергоемкости динам1гческого гасителя колебаний.
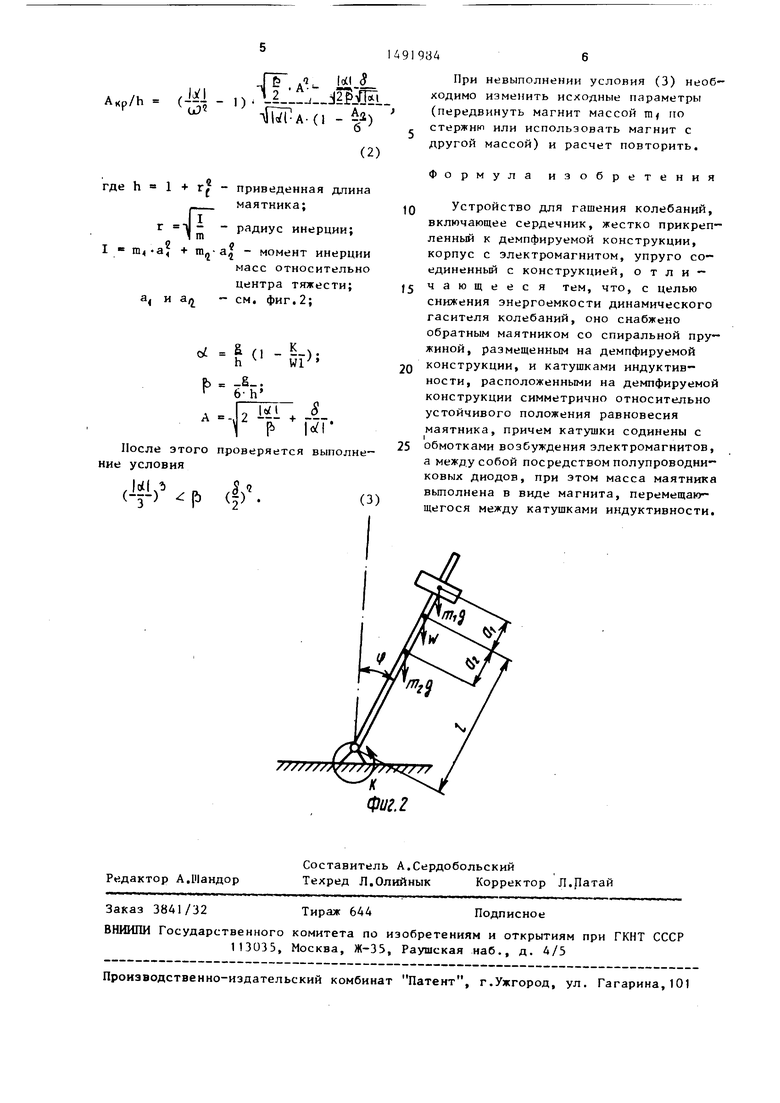
На фиг, 1 показано предлагаемое ус тройство; на фиг.2 - обратный маятник .
Обратный маятник состоит из стержня 1, шарнирно соединенного с демпфируемой конструкцией 2. На стержне 1 расположен с возможностью фиксации в разных точках по его длине магнит (т) 3. В основании маятника расположена спиральная пружина 4 с жесткостью К.
Симметрично относительно устойчивого наклонного положения равновесия обратного маятника на конструкции 2 установлены катушки 5 индуктивности, соединенные с обмотками 6 возбуждения электромагнитов 7, подвешенных к демпфируемой конструкции 2 посредством упругих элементов 8. Между электромагнитами 7 помещен сердечник 9, жесткр соединенный с основанием 2 Катушки 5 индуктивности соединены между собой через полупроводниковые диоды 10,
Если амплитуда стационарных колебаний конструкции 2 меньше , имеют мест колебания маятника с малыми амплитудам относительно устойчивого положения
ШГ „ Ь КГ
равновесия
j- ч- 1 v
П
Как только амплитуда колебаний демпфируемой конструкции 2 превосходит 40 допустимое (критическое) значение , малые колебания относительно наклонного положения маят}1ика скачкообразно сменяются большими колебаниями
относительно неустойчивого положения о
равновесия Ц Тг7Т
При скачкообразном переходе маят-i ника в положение неустойчивого равновесия магнит (масса т) 3 перемещается внутри катушек 5 индуктивности, в которых генерируется индукционньгй ток, подаваемый на обмотки 6 возбуждения электромагнитов 7, подвешенных к демпфируемому объекту (основание) 2 посредством упругих элементов 8. Каждая катушка 5 возбуждения соединена с обмотками 6 возбуждения злектро
0
5
0
5
0
5
0
5
магнитол 7, выполняющих функции массы гасителя, чтобы при перемешении магнита внутри каждой катушки индукционный ток синхронно поступал на обмотки 6 возбуждения электромагнитов 7. При этом в обмотках 6 возбуждения электромагнита 7 возникает магнитное поле.
Электромагниты 7 при колебаниях конструкции 2, демпфируя их, также колеблятся относительно магнита 3 и соединенного с ним сердечника 9. При взаимодействии колеблющихся электромагнитов 7 и сердечника 9 в их магнитном поле возникают силы, препятствующие перемещениям первых, т.е. гашению их колебаний. И так происходит до тех пор, пока амплитуда колебаний конструкции 2 перестанет превышать критические (допустимые) значения. Колебания обратного маятника скачкообразно переходят с больших амплитуд вокруг положения неустойчивого равновесия к колебаниям с малыми амплитудами вокруг установившегося положения. Постановка полупроводниковых диодов исключает поступление тока из работающей в данный момент времени катушки 5 индуктивности в неработающую.
Настройка обратного маятника на частоту гармонического возбуждения ((D) осуществляется путем подбора масс груза (тд) и стержня (т), длины стержня и места расположения груза, а также жесткости спиральной пружины (К) таким образом, чтобы выполнялось условие
W 1 : К,(I)
где V mig - вес маятника;
1 - расстояние от оси вращения маятника до пентра тяжести:
К жесткость спиральной пружины;
m - масса системы, равная сумме масс груза (т) и стержня (тП|2);
g - ускорение свободного падения.
Зная частоту гармонического возбуждения (и) и величину критической амплитуды (Ацр), которую нельзя превосходить, определяют величину О из следующего выражения (квадратное уравнение относительно о ):
