Изобретение относится к сейсмологии, в частности к конструкциям приемников сейсмических сигналов, и может быть использовано для контроля и записи вибрационных перемещений земной коры при различных динамических процессах как на поверхности, так и внутри грунтовых массивов, а также любого технологического оборудования, включая ядерные реакторы.
Известен сейсмограф ВЭГИК для изучения сейсмического эффекта взрывов, регистрации землетрясений и микросейсм первого рода [1]. Сейсмограф содержит маятник, подвешенный к стойкам на двух парах взаимно перпендикулярных тонких стальных пластин (крестовой упругий шарнир), образующих ось вращения маятника. Для регистрации вертикальных колебаний оси вращения придается горизонтальное положение, а маятник находится в горизонтальном положении (центр тяжести в одной горизонтальной плоскости с осью вращения удерживается при помощи стальной винтовой пружины). Положение равновесия маятника регулируется винтом, меняющим натяжение пружины, а период собственных колебаний (Т1 = 0,8-2 с) - путем изменения угла наклона пружины и сменой подвесных стальных пластин. Для регистрации горизонтальных колебаний пружина снимается с маятника, прибор поворачивается на 90о и становится на три установочных винта. Маятник оканчивается легкой дюралюминиевой формой, на конце которой жестко укреплен легкий цилиндрический каркас из плексигласа с намотанными на нем двумя обмотками (катушками) из тонкого эмалированного медного провода. Катушка находится в цилиндрическом воздушном зазоре постоянного магнита. Одна из катушек служит для регистрации движения маятника, другая - для регулировки его затухания. Маятник со стойками и магнит смонтированы на плоской станине, которая жестко крепится в металлическом корпусе. Одна из боковых стенок для наблюдения за состоянием маятника сделана из плексигласа. Регистрация колебаний производится обычно при помощи малогабаритных гальванометров [1]. Недостатком известного сейсмографа является низкая надежность, обусловленная наличием крестообразного подвеса. Резкие колебания (при взрывах, толчках) сминают или срезают пластины.
Наиболее близким по технической сущности к предлагаемому изобретению является сейсмограф ВБП-3, содержащий маятник, состоящий из двух неравных, но близких по величине масс, размещенных симметрично с двух сторон от оси вращения. Маятник выполнен в виде плоской алюминиевой рамки, на одной стороне которой для уменьшения массы высверлены отверстия. Для прочности у рамки имеются ребра жесткости. Латунные полуоси, закрепленные на рамке и посаженные в радиальные шарикоподшипники, образуют ось вращения маятника. Цилиндрическая рамка из электролитической меди, закрепленная на маятнике, служит для демпфирования его собственных колебаний. На рамку намотана тонким медным эмалированным проводом плоская индукционная катушка, служащая преобразователем. Маятник на подшипниках установлен в гнездах латунной скобы, жестко прикрепленной к полюсным наконечникам подковообразного постоянного магнита из сплава "Магнико". Полюсные наконечники из мягкого железа приклеены к магниту клеем БФ. На скобе на двух направляющих стержнях установлен еще цилиндрический сердечник из мягкого железа. В воздушном зазоре между полюсными наконечниками и сердечником образуется равномерное радиальное магнитное поле. При намагничивании сердечник снимается, иначе основной магнитный поток направляется через него, а не через магнит. Взамен сердечника в воздушный зазор вводится латунный клин, чтобы избежать поломки магнита. В этом зазоре находится медная рамка демпфера с индукционной катушкой преобразователя. При такой системе подвески маятник колеблется с угловыми поворотами до 30о в обе стороны от положения равновесия, не ударяясь об ограничители (скобу). Магнит с маятником вставляется в выемку станины (шасси) и жестко крепится к ней перекладиной и болтами. Концы индукционной катушки выведены к колодке на станине. К ней же подведен кабель, пропущенный через герметичный сальник в станине. Защитный кожух из немагнитного материала прижимается болтами к станине через резиновую прокладку и обеспечивает герметичность прибора до давления в 2 атм. На станине укреплена ручка для переноски прибора. Жестко связанные между собой скоба, магнит, станина и кожух образуют основание прибора, которое при измерениях следует за движением объекта, маятник при этом стремится остаться в покое. В индукционной катушке возбуждается ЭДС, пропорциональная скорости движения основания относительно маятника. Эта ЭДС подается на клеммы гальванометра магнитоэлектрического осциллографа (регистратора) [2]. Недостатком известного сейсмографа является низкая чувствительность, обусловленная тем, что подвес маятника осуществлен на осях, вращающихся в шарикоподшипниках.
Цель изобретения - повышение чувствительности, расширение диапазона измерения в сторону нижних частот, противогрузочной способности и создание технической возможности размещения в вертикальных каналах и скважинах (уменьшение габаритов).
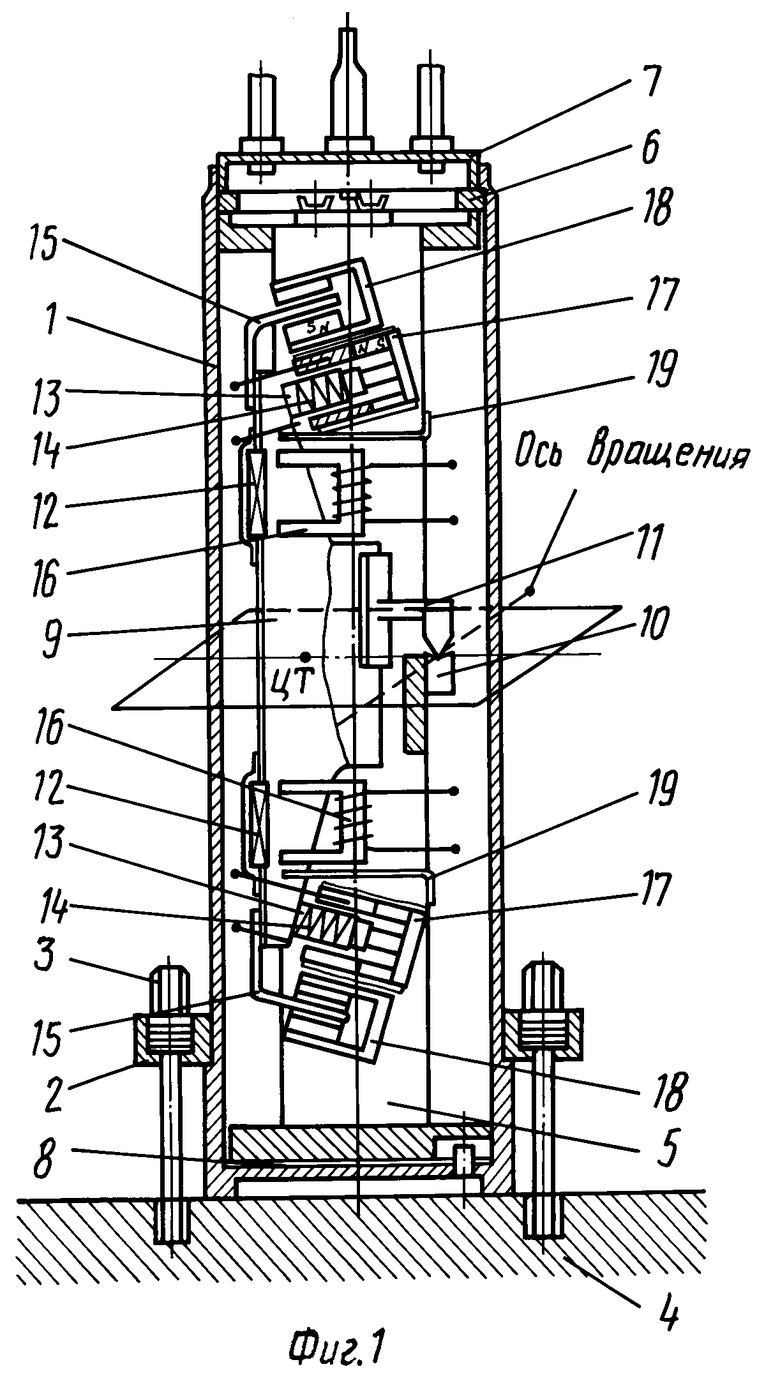
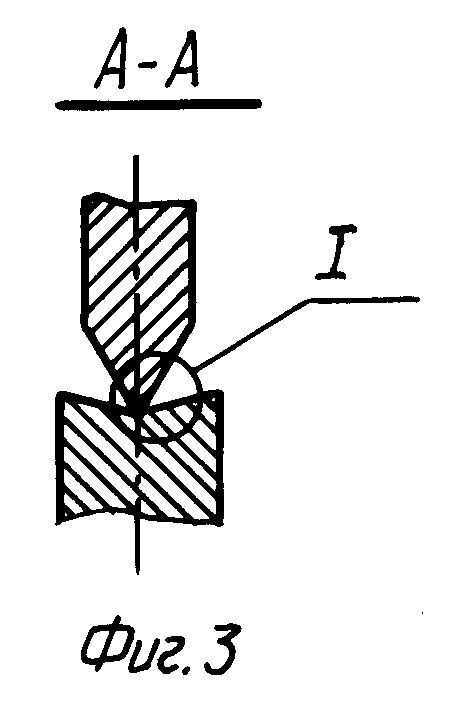
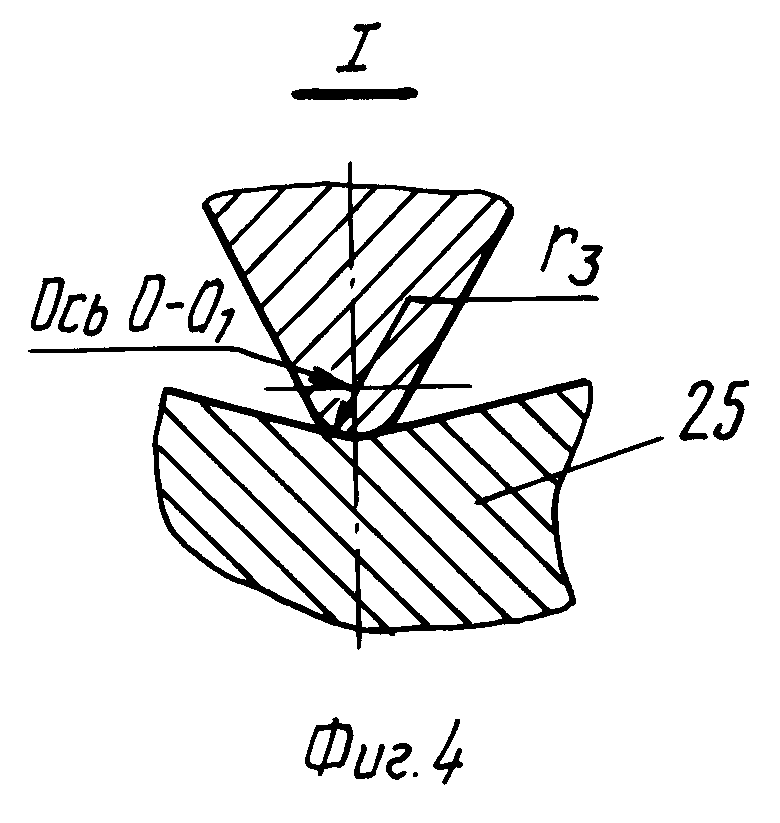
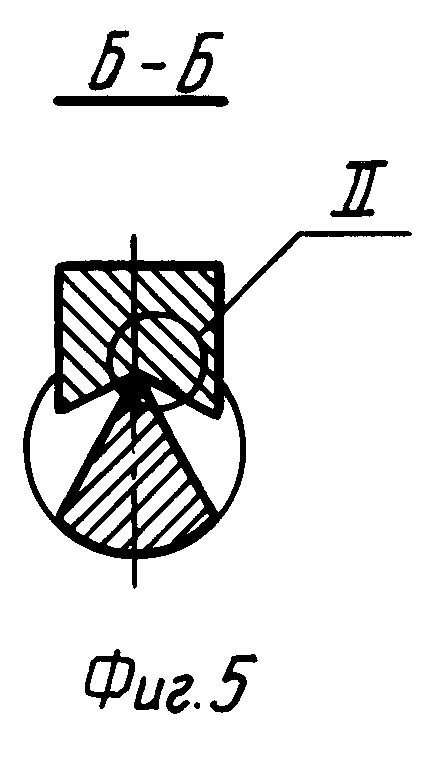
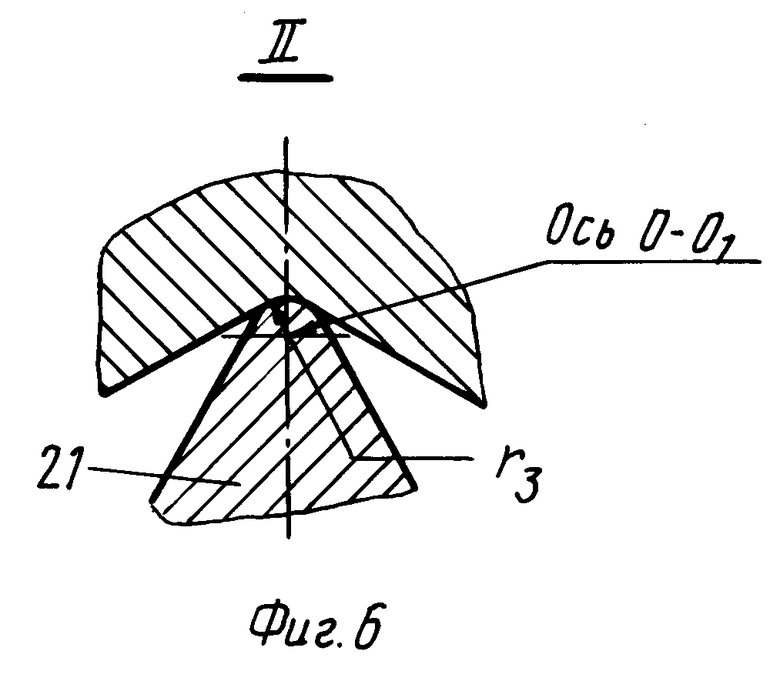
На фиг.1 представлена конструктивная схема сейсмографа; на фиг.2 - узел качения; на фиг.3 - разрез по А-А на фиг.2; на фиг.4 - узел I на фиг.3; на фиг.5 - разрез по Б-Б на фиг.2; на фиг.6 - узел II на фиг.5.
Сейсмограф состоит из жесткого цилиндрического корпуса 1 (герметичного), который через зажимное кольцо 2 шпильками 3 крепится к объекту 4 исследования. Внутри корпуса 1 размещено шасси 5, крепление которого к корпусу 1 осуществлено посредством стопорного резьбового кольца 6, фиксированного верхней запаянной крышкой 7. Для ликвидации взаимных подвижек корпуса 1 и шасси, вызванных различиями в температурных коэффициентах расширения материалов, предусмотрена предварительно нагруженная с усилием 400 Н плоская пружина 8, расположенная между днищем корпуса 1 и основанием шасси 5. Конструктивные шип и паз (без позиции) в данном соединении препятствуют повороту шасси 5 относительно корпуса 1. Внутри корпуса 1 размещен маятник 9, выполненный из титановой трубки со скошенными торцами и с технологическими и крепежными отверстиями на его образующей поверхности. Маятник 9 соединен с узлом качения 10 посредством титанового кронштейна 11. Сейсмограф имеет измерительный преобразователь перемещения маятника, демпфирующее устройство, узел компенсации момента силы тяжести и элементы связи и передачи информации на диспетчерский пункт. На несущей конструкции маятника 9 симметрично относительно горизонтальной плоскости, проходящей через центр тяжести, установлены по мере удаления от этого центра тяжести следующие элементы: замыкатель 12 (шунтирующая часть) преобразователя перемещения, каркас 13 из проводящего немагнитного материала с силовой обмоткой 14 узла компенсации и пассивный элемент 15 (медная пластинка) демпфирующего устройства. Кроме того, на маятнике 9 размещены элементы, повышающие жесткость маятника, и элементы балансировки маятника (не показаны). На шасси 5 закреплены ответные части: катушки 16 - активные системы преобразователя перемещения, магнитные системы 17 узла компенсации момента силы тяжести, магнитные системы 18 демпфирующих устройств, узел качения 10 (подвески) маятника 9, магнитные экраны 19, клеммные колодки (не показаны) и опорные элементы (не показаны) трассировки проводов (элементы связи и передачи информации на диспетчерский пункт).
Активные системы - катушки 16 преобразователя перемещения состоят из П-образного магнитопровода, выполненного из электролитической стали, обмотки - из провода ПНЭТ - КСОТ, содержащих по 150 витков, и держателя с магнитами элементами фиксации провода. В конструкции держателя предусмотрены элементы, увеличивающие его жесткость (например, в виде дополнительных ребер жесткости).
Магнитные системы 17 узла компенсации силы тяжести выполнены в виде коаксиально-цилиндрической конструкции с кольцевым магнитом (из материала 10 НДК 35Т5А) и магнитопроводов (из сплава 49 КФ 2), обеспечивающих цилиндрический рабочий зазор с индукцией магнитного поля 1 Тл. Обечайка (без позиции) магнитной системы 17 выполнена из титанового сплава. Соединение деталей магнитной системы осуществлено спецклеем, выдерживающим нагрев до 400оС (например К-400). Кроме того, узел компенсации может быть выполнен в виде индукционного токовихревого привода, статорная часть которого жестко закреплена на шасси.
Магнитные системы 18 демпфирующих устройств выполнены в виде О-образного магнитопровода с парой последовательно включенных магнитов. Элементы крепления магнитной системы допускают регулировку демпфирования путем шунтирования части рабочего магнитного потока. Магнитные экраны 19 представляют собой пластины из стали Ст10 и предназначены для ослабления влияния полей рассеяния магнитных систем на пассивные элементы - замыкатели 12 преобразователя перемещения маятника. Клеммная колодка выполнена из керамики и несет на себе клеммы, к которым методом контактной сварки присоединены провода. Опорные элементы трассировки проводов выполнены из керамики и расположены как на самом шасси, так и в специально отведенных каналах.
Узел качения имеет опорный нож 20, жестко связанный при помощи кронштейна 11 с маятником 9, и вспомогательный нож 21, связанный с шасси 5 через упругий элемент 22 (силовая пружина). Ножи 20 и 21 установлены друг относительно друга встречно и имеют систему (регулировки) совмещения осевой линии их кромок закругления (осей ножей) по вертикали - гайка 23, и по горизонтали путем вращения ножа 21 вокруг продольной его оси стержнями, вставляемыми в специальные отверстия 24.
Опорный узел подвески маятника выполнен из стали Р18, закаленной до HRC 65 ед, и представляет собой конструкцию, содержащую подушки 25 под опорный нож 20, пластины 26 - ограничители горизонтальных подвижек ножа, паз 27 для укладки силовой пружины 22 и винты 28 установки требуемого прижимного усилия с автофикcацией.
Все элементы электромагнитных систем (преобразователя перемещения, демпфирующего устройства и узла компенсации) являются элементами оригинального исполнения, в основу которых заложены известные конструктивные и технологические приемы.
Сейсмограф работает следующим образом. Принцип работы основан на преобразовании вертикальных возмущающих (вибрационных) перемещений основания сейсмографа во вращательные движения вертикального маятника 9 Голицына.
Для приведения системы в равновесие в оси должен действовать постоянный, независящий от угла момент Mm, компенсирующий действие силы тяжести.
Значение этого момента определяется выражением
Mm = m ˙g ˙ l ˙ cos ϕ, где m - масса маятника;
g - ускорение свободного падения,
l - длина рычага;
ϕ - угол провисания.
На центр тяжести (ЦТ) маятника 9 действует сила, создающая момент m ˙ g ˙l. Компенсирующий момент создается парой сил электромагнитной системы 13, 14, 17. Причем неподвижным элементом являются магнитные системы 17, исключающие влияние внешних магнитных полей (за счет экранировки обмотки магнитопровода системы 17).
Совокупность масс элементов 12, 13, 14, 15, массы маятника 9, а также их взаимное расположение (симметрично относительно горизонтальной плоскости, проходящей через ЦТ маятника) на перифериях маятника определяют момент инерции I и положение ЦТ маятника.
Пренебрегая трением в опоре узла качения 10, выражение для амплитудно-частотной характеристики (АЧК) можно представить в виде =
=  где Авых - амплитуда перемещения замыкателя 12 преобразователя перемещения маятника;
где Авых - амплитуда перемещения замыкателя 12 преобразователя перемещения маятника;
Авх - амплитуда вертикальных входных перемещений;
ω - 6,28 F - круговая частота вибрационных воздействий;
F - частота вибрации;
ωo=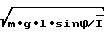 - собственная частота маятника;
- собственная частота маятника;
bc - декремент затухания (подбирается в процессе настройки);
R - расстояние от оси вращения.
Вращательное движение вертикального маятника 9 преобразуется с помощью замыкания 12 и катушки 16 в электрический сигнал. Индуктивный полумост, на базе которого выполнен преобразователь перемещения маятника, питается переменным напряжением частотой 5 кГц и амплитудой до 30 В (преимущественно 25 В).
Электромагнитные системы 13, 14, 17, поддерживающие маятник 9 в подвешенном состоянии, питаются от стабилизатора тока, который соединен кабелем КУГВЭВнг (по линии питания переменным напряжением 5 кГц) и кабелем КВВГЭнг (по линии питания постоянным током).
Сейсмограф прошел испытания и подтвердил свою эффективность.
Сейсмограф компактен (габариты: высота корпуса Н = 350 мм ±0,5, диаметр d = 74 мм ±0,5) за счет использования некоторых узлов конструкции для выполнения нескольких функций. Так, узлы 13, 14, 17 кроме создания компенсационной пары сил выполняют дополнительную функцию демпфера. Ножи 20, 21, кроме выполнения функции оси вращения, несут функцию удержания контакта при перегрузках более 1 g за счет встречного расположения. Все элементы, размещенные на маятнике, кроме своих непосредственных функций создают дополнительный момент инерции, направленный на понижение резонансной частоты за счет периферийного размещения симметрично относительно ЦТ маятника. Корпус 1, кроме своих защитных функций, участвует в создании понижения добротности собственной резонансной частоты шасси 5 за счет использования системы крепления (гайка 6) и за счет легкой прессовой посадки шасси 5 в корпусе 1. Применение изобретения позволит повысить надежность эксплуатации промышленных агрегатов в районах с сейсмической активностью. Высокая чувствительность в области низких частот (0,1-2 Гц) делает этот прибор незаменимым при контроле начала аварийных ситуаций особенно на взрывоопасных объектах, использующих атомную энергию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
| СЕЙСМОГРАФ | 2004 |
|
RU2258245C1 |
| Поплавковый маятниковый компенсационный акселерометр | 1982 |
|
SU1080089A1 |
| СЕЙСМОГРАФ | 2005 |
|
RU2300785C1 |
| ГОРИЗОНТАЛЬНЫЙ СЕЙСМОГРАФ | 2007 |
|
RU2343505C1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| Крутильный сейсмометр | 1980 |
|
SU890310A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2568963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2455616C1 |
| ДАТЧИК УДАРА | 1999 |
|
RU2149459C1 |
Использование: сейсмология, для контроля и записи вибрационных перемещений земной коры при различных динамических процессах как на поверхности так и внутри грунтовых массивов, а также любого технологического оборудования, включая атомные реакторы. Сущность изобретения: содержит герметический корпус, в котором размещены шасси, маятник, демпфирующее устройство, преобразователь перемещения маятника, узел компенсации момента силы тяжести, узел качения и элементы связи и передачи информации на диспетчерский пункт. Все элементы, размещенные на маятнике, кроме своих непосредственных функций, создают дополнительный момент инерции, направленный на понижение резонансной частоты за счет периферийного размещения симметрично относительно центра тяжести маятника. Корпус прибора, кроме своих защитных функций, участвуют в создании понижения добротности собственной резонансной частоты шасси за счет использования системы крепления и за счет легкой прессовой посадки шасси в корпусе. Компактное размещение узлов обусловлено выбором формы маятника: титановая трубка со скошенными торцами и с технологическими и крепежными отверстиями, а также выполнением узла качения: пара ножей, одна из которых жестко закреплена на цилиндрической форме маятника, а другая связана с шасси, причем ножи размещены друг относительно друга встречно с возможностью установки осевой линии их кромок закругления по одной прямой. 6 ил.
СЕЙСМОГРАФ, содержащий герметичный корпус, в котором размещены шасси, маятник, узел качения, электромагнитный преобразователь перемещения маятника, узел компенсации момента силы тяжести, электромагнитное демпфирующее устройство и элементы линии связи с регистратором, отличающийся тем, что электромагнитный преобразователь перемещения маятника, узел компенсации момента силы тяжести и электромагнитное демпфирующее устройство выполнены из двух идентичных систем, размещенных симметрично относительно плоскости, проходящей через центр тяжести маятника и перпендикулярной к его оси вращения, при этом маятник выполнен в виде протяженной фигурной полой цилиндрической формы, а узел качения выполнен в виде пары ножей, один из которых жестко закреплен на цилиндрической форме, а другой нож связан с шасси через упругий элемент, причем ножи размещены друг относительно друга встречно с возможностью установки осевой линии их кромок закругления по одной прямой, узел компенсации выполнен в виде коаксиально установленных магнитной системы, закрепленной на шасси, и полой глухой катушки, обмотка которой размещена на каркасе из проводящего немагнитного материала, жестко закрепленного на маятнике, на котором установлены пассивные элементы демпфирующего устройства и преобразователя перемещения маятника, а магнитные системы демпфирующего устройства и преобразователя перемещения закреплены на шасси, при этом пассивные элементы преобразователя перемещения маятника, узла компенсации момента силы тяжести и демпфирующего устройства размещены на противоположных концах цилиндрической формы маятника.
| Вопросы инженерной сейсмологии, изд-во АН СССР, м.: вып.4, 1961, с.60-61. |
