1
(21)Д334876/23-03
(22)ЗО.По87
(46) 07„07.89. Бюл. № 25
(71)Московский горный институт
(72)А.С.Вознесенский
(53)622.289(088.8)
(56)Огненно В.А.и др. Контроль сейсмоакустической эмиссии ударо- опасного участка горных пород СУБРа. В сб.: Геофизические основы контроля напряжений в горных породах„ - Новосибирск: 1983, с. 92.
Авторское свидетельство СССР № 1213194, кл„ Е 21 С 39/00, 1986.
(54)СПОСОБ CEJfEKUHH АКУСТИЧЕСКИХ СИГНАЛОВ В МАССИВЕ ГОРНЬ/Х ПОРОД
(57)Изобретение относится к горному делу. Цель - повышение надежности селекции в анизотропном массиве. В массиве 1 горных пород распространяются акустические сигналы АС) от источников 2 акустической эмиссии и источников 3 акустической помехио Эти АС принимаются преобразователями (П) 4 и 7. Первый из них является П запуска временного интервала запрета, а второй - П сигнала проверки. Если АС, воспринимаемый П 7, попадает во временной интервал запрета, то он считается сигналом помехи. В противном случае АС регистрируется как сигнал акустической эмиссии, Для определения места размещения П 4 и 7 выбирают положение вершины 8 конической поверхности 9, охватывающей зону 5 контроля между источниками 2 и 3. Определяют скорости распространения АС по различным направлениям, коэффициент анизотропии скоростей и направление 11 минимальной скорости распространения АС. Задают угол оСд меньше 90 между направлением 11 и осью 12. Опреде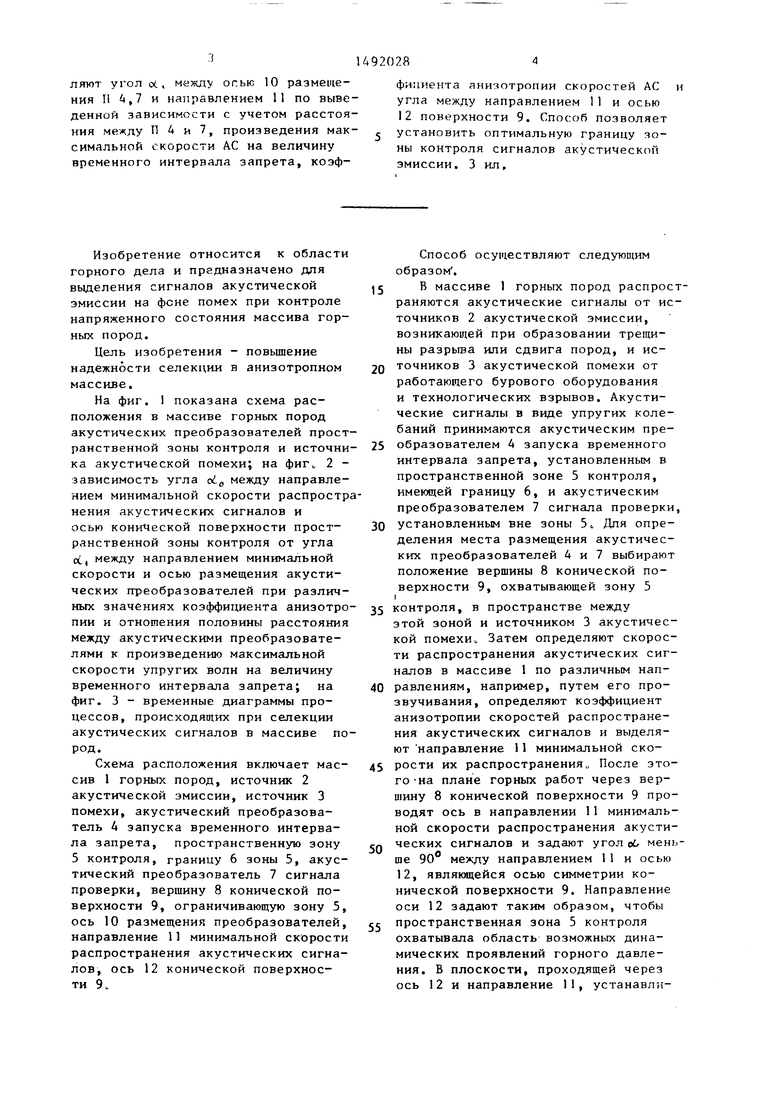
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство селекции акустических сигналов массива горных пород | 1986 |
|
SU1361326A1 |
| СПОСОБ ДИАГНОСТИКИ ОПАСНЫХ СИТУАЦИЙ ПРИ ПОДЗЕМНОЙ ДОБЫЧЕ КАМЕННОГО УГЛЯ И МЕТОДИКА ПРОГНОЗА ПАРАМЕТРОВ ЗОН ТРЕЩИНОВАТОСТИ, ОБРАЗОВАННОЙ ГИДРОРАЗРЫВОМ ПЛАСТА | 2011 |
|
RU2467171C1 |
| Способ определения зон активного трещинообразования в процессе деформирования горных пород и других материалов и многоканальное устройство для его осуществления | 1986 |
|
SU1396105A1 |
| Способ профилактической обработки горного массива и устройство для его осуществления | 1980 |
|
SU911048A1 |
| Способ определения удароопасности участков массива горных пород и устройство для его осуществления | 1987 |
|
SU1553717A1 |
| Устройство для определения координат источника акустической эмиссии | 1989 |
|
SU1712918A1 |
| Способ мониторинга процесса разрушения горных пород в массиве и автоматизированная система для его осуществления | 1989 |
|
SU1645514A1 |
| Акустический способ оценки напряженно-деформированного состояния массива горных пород | 1986 |
|
SU1402667A1 |
| Устройство для контроля напряженного состояния массива горных пород | 1988 |
|
SU1627695A1 |
| Способ определения координат очага акустической и электромагнитной эмиссии | 1989 |
|
SU1657641A1 |
Изобретение относится к горному делу. Цель - повышение надежности селекции в анизотропном массиве. В массиве 1 горных пород распространяются акустические сигналы (АС) от источников 2 акустической эмиссии и источников 3 акустической помехи. Эти АС принимаются преобразователями (П) 4 и 7. Первый из них является П запуска временного интервала запрета, а второй - П сигнала проверки. Если АС, воспринимаемый П 7, попадает во временной интервал запрета, то он считается сигналом помехи. В противном случае АС регистрируется как сигнал акустической эмиссии. Для определения места размещения П 4 и 7 выбирают положение вершины 8 конической поверхности 9, охватывающей зону 5 контроля между источниками 2 и 3. Определяют скорости распространения АС по различным направлениям, коэффициент анизотропии скоростей и направление 11 минимальной скорости распространения АС. Задают угол α0 меньше 90° между направлением 11 и осью 12. Определяют угол α1 между осью 10 размещения П 4,7 и направлением 11 по выведенной зависимости с учетом расстояния между П 4 и 7, произведения максимальной скорости АС на величину временного интервала запрета, коэффициента анизотропии скоростей АС и угла между направлением 11 и осью 12 поверхности 9. Способ позволяет установить оптимальную границу зоны контроля сигналов акустической эмиссии. 3 ил.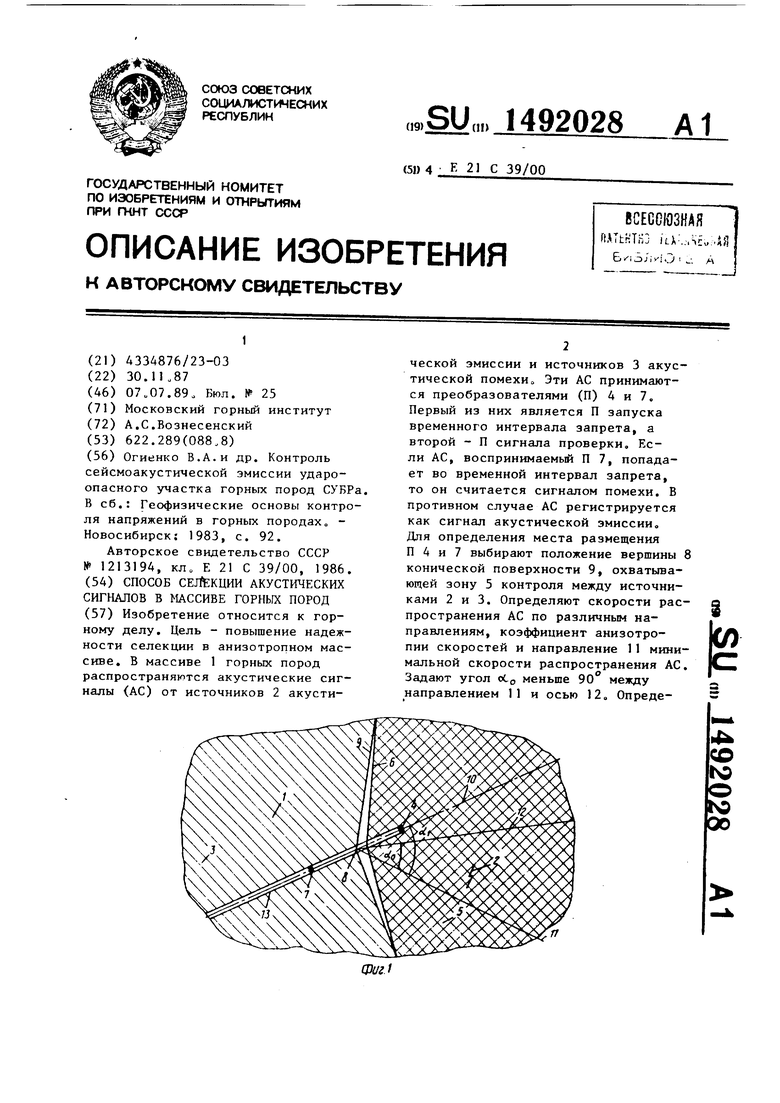
ляют угол ОС, между осью 10 размещения П 4,7 и направлением 11 по выведенной зависимости с учетом расстояния между П 4 и 7, произведения максимальной скорости АС на величину временного интервала запрета, коэфИзобретение относится к области горного дела и предназначено для выделения сигналов акустической эмиссии на фоне помех при контроле напряженного состояния массива горных пород.
Цель изобретения - повьшение надежности селекции в анизотропном массиве.
На фиг, 1 показана схема расположения в массиве горных пород акустических преобразователей пространственной зоны контроля и источника акустической помехи; на фиг 2 - зависимость угла «L между направлением минимальной скорости распрострнения акустических сигналов и осью конической поверхности пространственной зоны контроля от угла ol, между направлением минимальной скорости и осью размещения акустических преобразователей при различных значениях коэффициента анизотропии и отношения половины расстояния между акустическими преобразователями к произведению максимальной скорости упругих волн на величину временного интервала запрета; на фиг. 3 - временные диаграммы процессов, происходящих при селекции акустических сигналов в массиве пород.
Схема расположения включает массив 1 горных пород, источник 2 акустической эмиссии, источник 3 помехи, акустический преобразователь 4 запуска временного интервала запрета, пространственную зону 5 контроля, границу 6 зоны 5, акустический преобразователь 7 сигнала проверки, вершину 8 конической поверхности 9, ограничивающую зону 5, ось 10 размещения преобразователей, направление 11 минимальной скорости распространения акустических сигналов, ось 12 конической поверхности 9.
филиента анизотропии скоростей АС угла между направлением 11 и осью 12 поверхности 9. Способ позволяет установить оптимальную границу зоны контроля сигналов акустической эмиссии. 3 ил.
Способ осуществляют следующим образом,
5 В массиве 1 горных пород распространяются акустические сигналы от источников 2 акустической эмиссии, возникающей при образовании трещины разрьша или сдвига пород, и ис0 точников 3 акустической помехи от работающего бурового оборудования и технологических взрывов. Акустические сигналы в виде упругих колебаний принимаются акустическим пре5 образователем 4 запуска временного интервала запрета, установленным в пространственной зоне 5 контроля, имеющей границу 6, и акустическим преобразователем 7 сигнала проверки,
0 установленным вне зоны 5 Для определения места размещения акустических преобразователей 4 и 7 выбирают положение вершины 8 конической поверхности 9, охватывающей зону 5 I
5 контроля, в пространстве между
этой зоной и источником 3 акустической помехи о Затем определяют скорости распространения акустических сигналов в массиве 1 по различным нап0 равлениям, например, путем его про- звучивания, определяют коэффициент анизотропии скоростей распространения акустических сигналов и выделяют направление 11 минимальной ско5 рости их распространения„ После этого -на плане горных работ через вершину 8 конической поверхности 9 проводят ось в направлении 11 минимальной скорости распространения акустических сигналов и задают угол об MeHfj0
5
ше 90 между направлением 11 и осью 12, являющейся осью симметрии конической поверхности 9. Направление оси 12 задают таким образом, чтобы пространственная зона 5 контроля охватывала область возможных динамических проявлений горного давления. В плоскости, проходящей через ось 12 и направление 1 1 , устанавл-иют несовпадение оси 10 размещения акустических преобразователей и оси 12 конической поверхности, которое и учитывает формула (1).
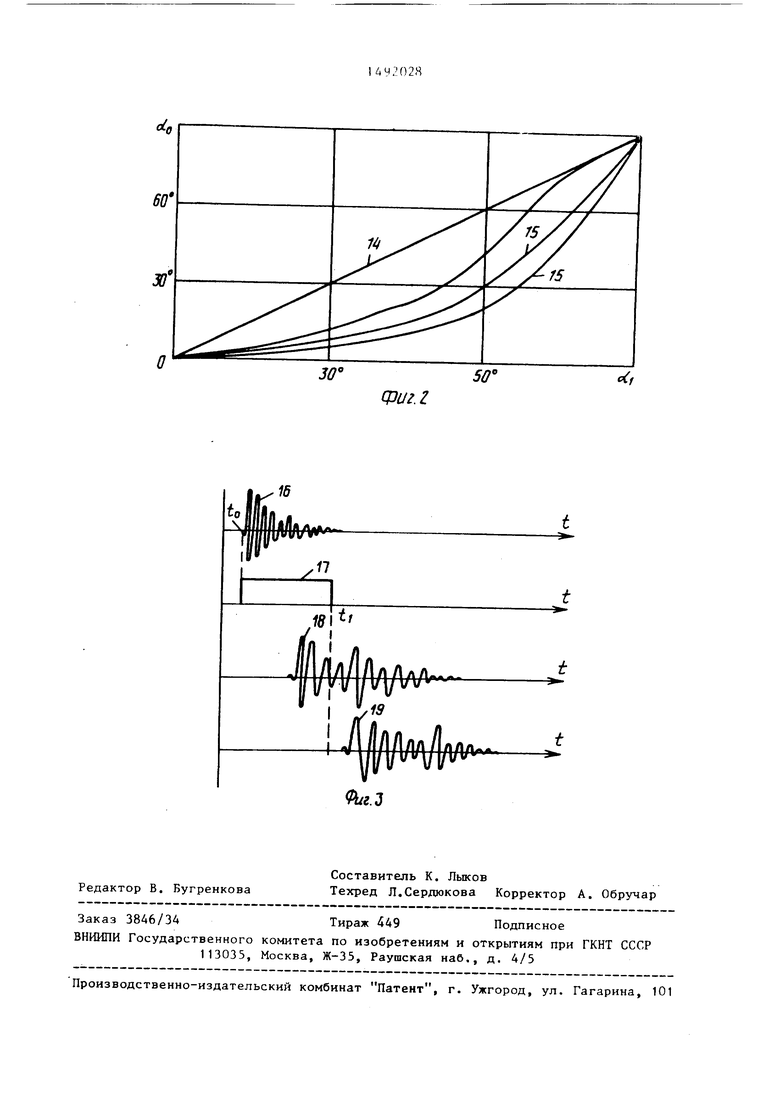
Сигнал 16 (фиг. 3), снимаемьй с акустического преобразователя 4 запуска временного интервала запрета в момент времени t, запускает формирователь временного интервала запрета, на выходе которого -образуется импульс 17 о Импульс 17 заканчивается в момент времени t „ Разница времени между t, и t равна величине временного интервала запрета. Сиг-J5 ливают на одной оси, проходящей ченал 18, воспринимаемый акустическим преобразователем 7 сигнала проверки, может начаться до окончания импуль- са 17. В этом случае он считается сигналом помехи. В том случае, если сигнал 19 начинается после окончания импульса 17, сигнал считается приходящим из зоны контроля, так как время задержки сигнала, воспринимаемого преобразователем 7, по отноше- нию к сигналу, воспринимаемому преобразователем А, достаточно велико и превосходит величину временной зоны запрета, что говорит о нахождерез вершину конической поверхности ограничивающую пространственную зо контроля, так, что эта вершина раз мещается между источником помехи и зоной контроля, причем первый преобразователь расположен внутри про ранственной зоны контроля, отли чающийся тем, что, с целью повышения надежности селекции в ан зотропном массиве, предварительно определяют коэффициент анизотропии скоростей распространения акустиче ких сигналов и направление минимальной скорости их распространении источника в пространственной зо- 30 ния, задают угол между осью конине 5 контроля. Таким образом, селекция акустических сигналов осуществляется по разности времени их прихода на преобразователи 4 и 7.
Способ позволяет повысить надежность селекции сигналов акустической эмиссии за счет получения в массиве
ческой поверхности пространственно зоны контроля и направлением минимальной скорости распространения акустических сигналов меньше 90 35 угол между осью размещения преобра зователей и направлением минимальной скорости выбирают из условия
tgo,
-8 fгr
АЪ
Ъ
-,Ч 4tg2o/o ( 1)(4 rr tg2oi. - г% 1)
2(Ь ,)tg2,.
де uit - угол между осью размещения . преобразователей и направлением минимальной скорости распространения акустических сигналов в массиве;
b - половина расстояния между 50 преобразователями;
d - произведение максимальной скорости распространения акустических сигналов на
пород гарантированной границы зоны контроля.
«Формула изобретения
Способ селекции акустических сигналов в массиве горных пород, включающий прием сигналов двумя преобра- зователями, первый из которых является преобразователем запуска временного интервала запрета, а второй- преобразователем сигнала проверки, при этом оба преобразователя устанаврез вершину конической поверхности, ограничивающую пространственную зону контроля, так, что эта вершина размещается между источником помехи и зоной контроля, причем первый преобразователь расположен внутри пространственной зоны контроля, отличающийся тем, что, с целью повышения надежности селекции в анизотропном массиве, предварительно определяют коэффициент анизотропии скоростей распространения акустических сигналов и направление минимальной скорости их распространения, задают угол между осью конической поверхности пространственной зоны контроля и направлением минимальной скорости распространения акустических сигналов меньше 90 угол между осью размещения преобразователей и направлением минимальной скорости выбирают из условия
Ъ
rr
величину временного интервала запрета;
- коэффициент анизотропии скоростей распространения акустических колебаний в массиве;
- угол между осью конической поверхности и направлением минимальной скорости распространения акустических колебаний.
51Д920286
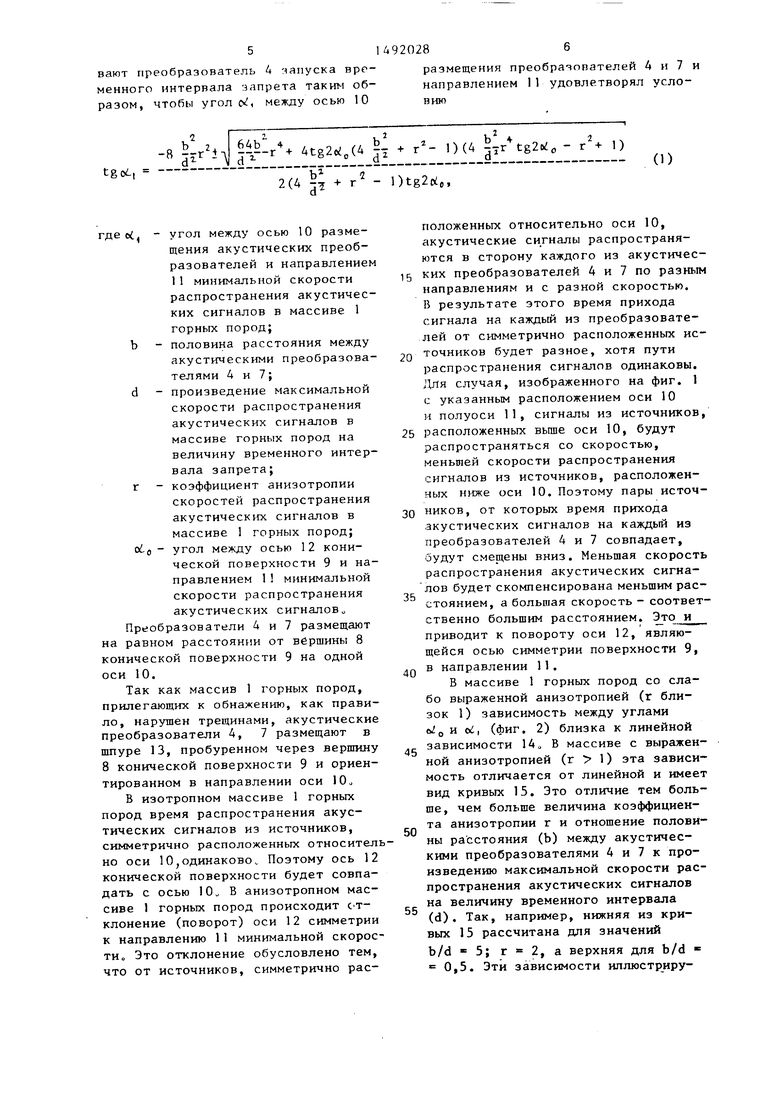
вают преобразователь 4 -запуска вре- размещения преобразователей 4 н 7 и менного интервала запрета таким об- направлением 11 удовлетворял усло- разом, чтобы угол ( между осью 10 вию
tgoi-i
где с., - угол между осью 10 размещения акустических преобразователей и направлением 11 минимальной скорости распространения акустических сигналов в массиве 1 горных пород;
b - половина расстояния между акустическими преобразователями 4 и 7;
d - произведение максимальной скорости распространения акустических сигналов в массиве горных пород на величину временного интервала запрета; г - коэффициент анизотропии
скоростей распространения акустических сигналов в массиве 1 горных пород; oig - угол между осью 12 конической поверхности 9 и направлением 1 минимальной скорости распространения акустических сигналов о Преобразователи 4 и 7 размещают на равном расстоянии от вершины 8 конической поверхности 9 на одной оси 10.
Так как массив 1 горных пород, прилегающих к обнажению, как правило, нарушен трещинами, акустические преобразователи 4, 7 размещают в шпуре 13, пробуренном через вершину 8 конической поверхности 9 и ориентированном в направлении оси 10о В изотропном массиве 1 горных пород время распространения акустических сигналов из источников, симметрично расположенных относително оси 10,одинаково Поэтому ось 12 конической поверхности будет совпадать с осью 10, В анизотропном массиве 1 горных пород происходит С Тклонение (поворот) оси 12 симметрии к направлению 11 минимальной скорости Это отклонение обусловлено тем, что от источников, симметрично рас(О
положенных относительно оси 10, акустические сигналы распространяются в сторону каждого из акустичес5 ких преобразователей 4 и 7 по разным направлениям и с разной скоростью, В результате этого время прихода сигнала на каждый из преобразователей от симметрично расположенных ис0 точников будет разное, хотя пути распространения сигналов одинаковы. Для случая, изображенного на фиг. 1 с указанным расположением оси 10 и полуоси 11, сигналы из источников,
5 расположенных выше оси 10, будут распространяться со скоростью, меньшей скорости распространения сигналов из источников, расположенных ниже оси 10. Поэтому пары источ0 НИКОВ, от которых время прихода акустических сигналов на каждый из преобразователей 4 и 7 совпадает, будут смерены вниз. Меньшая скорость распространения акустических сигналов будет скомпенсирована меньшим расстоянием, а большая скорость - соответственно большим расстоянием. Это и приводит к повороту оси 12, являющейся осью симметрии поверхности 9, в направлении 11.
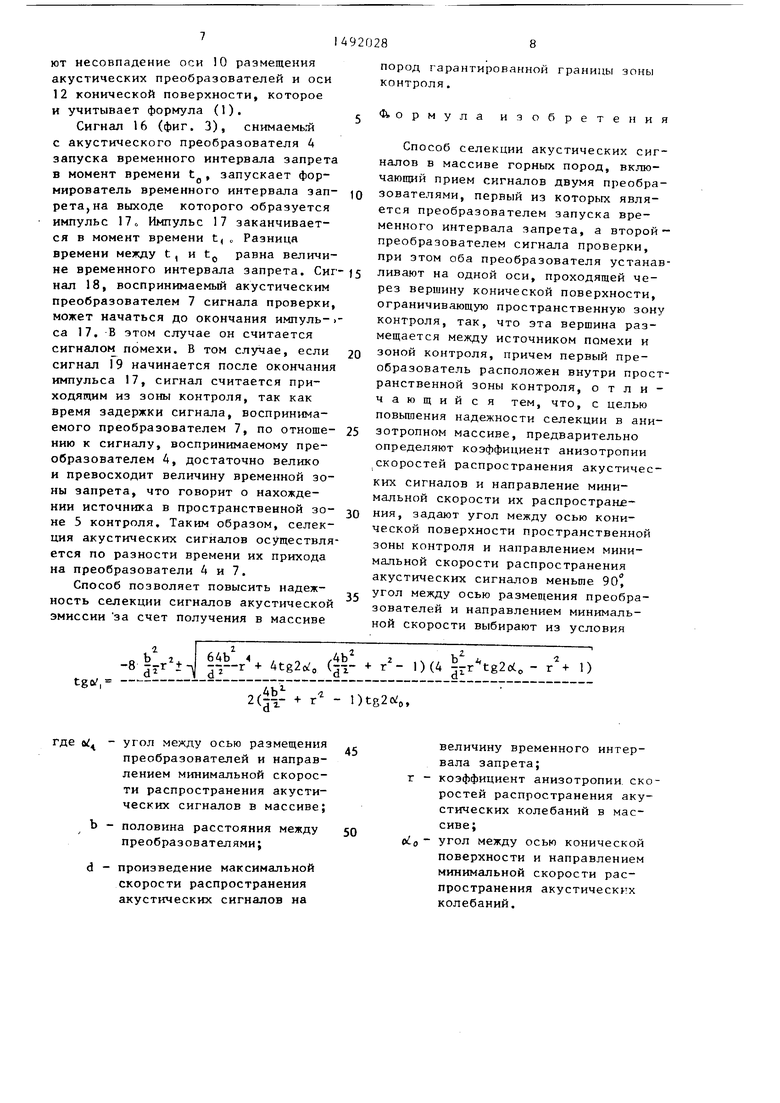
В массиве 1 горных пород со слабо выраженной анизотропией (г близок 1) зависимость между углами ui и oL, (фиг. 2) близка к линейной
J. зависимости 14 В массиве с выраженной анизотропией (г 1) эта зависимость отличается от линейной и имеет вид кривых 15. Это отличие тем больше, чем больше величина коэффициента анизотропии г и отношение половины расстояния (Ь) между акустическими преобразователями 4 и 7 к произведению максимальной скорости распространения акустических сигналов на величину временного интервала (d). Так, например, нижняя из кривых 15 рассчитана для значений
b/d 5; г 2, а верхняя для b/d « 0,5. Эти зависимости иплюстриру5
0
0
5
1
г.З