Изобретение относится к горному делу и может быть использовано для дистанционного неразрушающего контроля очагов напряженного состояния горного массива и определения их координат с помощью электромагнитной и акустический эмиссии, а также для определения положения очагов и других источников электромагнитных и акустических сигналов (взрывы, работающие механизмы).
Цель изобретения - повышение достоверности оценки напряженного состояния горного массива за счет повышения тэчности определения координат очага электромагнитной и акустической эмиссии и за счет исключения информации, вызванной искусственными помехами.
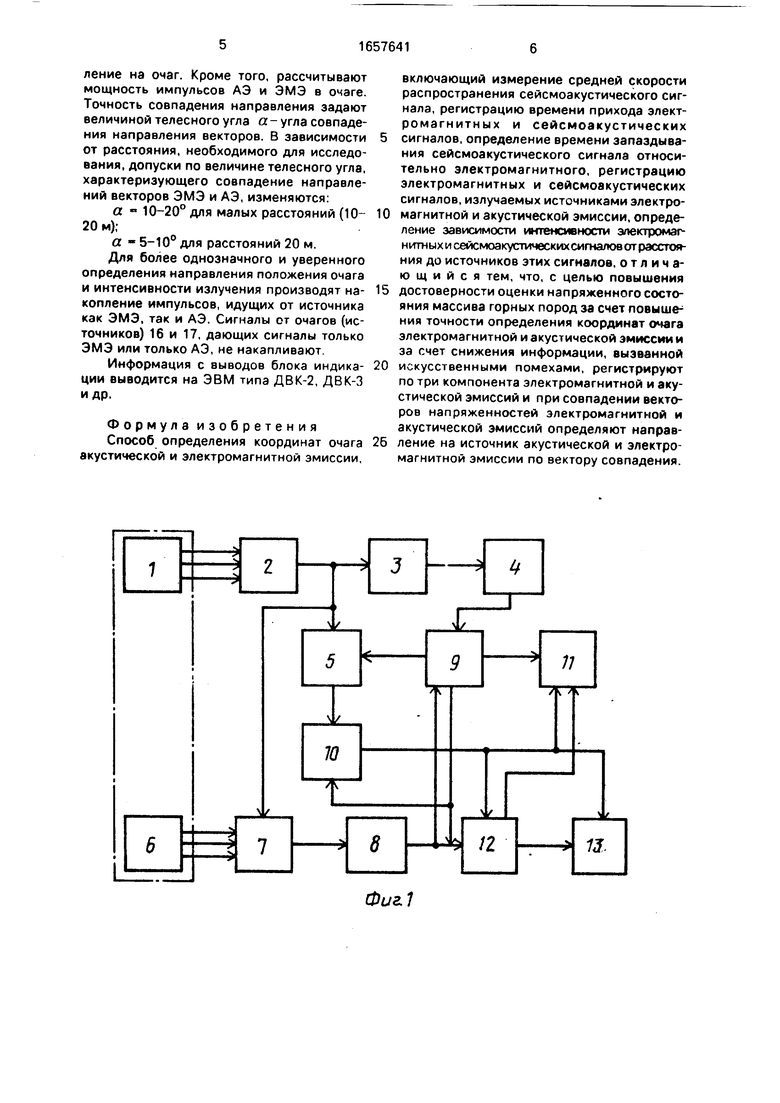
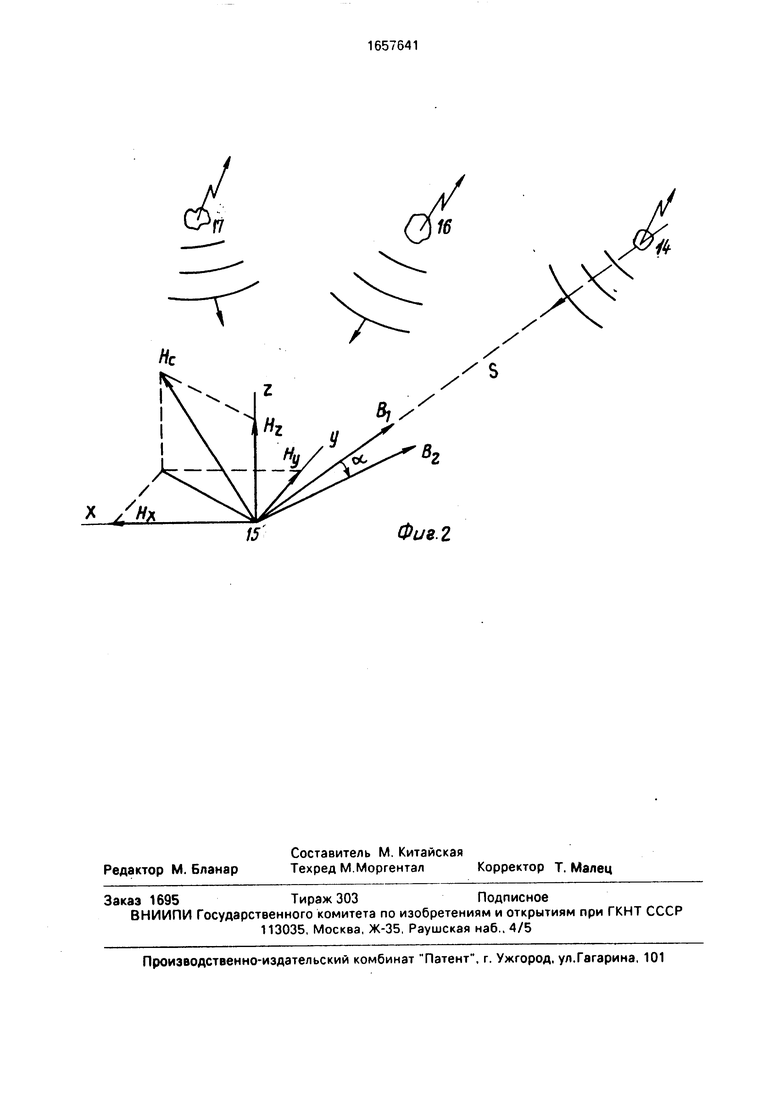
На фиг. 1 изображена структурная схема устройства для реализации способа; на фиг. 2 - схема осуществления предлагаемого способа.
Устройство (фиг. 1) содержит трехком- понентный датчик 1 электромагнитной эми- сии (ЭМЭ), блок 2 аналого-цифрового преобразования (АЦП) ЭМЭ, схему 3 вычисления направления вектора ЭМЭ. блок 4
Os
ел
ч Os
Јь
памяти канала ЭМЭ, блок 5 синхронизации канала акустической эмиссии (АЭ), трехком- понентный датчик 6 АЭ, блок 7 АЦП, блок 8 вычисления направления вектора АЭ, схему 9 сравнения векторов ЭМЭ и АЭ, схему 10 вычисления времени прохождения сигнала АЭ, блок 11 индикации,блок 12 вычисления декремента затухания АЭ, мощности излучения в очаге АЭ, степени напряженности массива, блок 13 регистрации. Причем выходы датчиков 1 и 6 подсоединены, соответственно, к входам блоков 2 и 7 АЦП, выходы которых подключены к схемам 3 и 8 вычисления векторов соответственно.
Блок 2 АЦП ЭМЭ одним из выходов подсоединен к блоку 5 синхронизации канала АЭ и к блоку 7 АЦП АЭ. Выход схемы 3 соединен с входом блока 4 памяти канала ЭМЭ, выход которого соединен через схему 9 сравнения векторов к блоку 5 и к блоку 11 индикации. Выход блока 5 соединен со схемой 10 вычисления времени прохождения сигнала АЭ, к другому входу которой подсоединена схема 9 сравнения векторов, выход и вход которой соединен со схемой 8. Выход схемы 10 присоединен к входам блока 11 индикации, блока 12 вычисления и блока 13 регистрации.Выход блока 12 вычисления соединен с одним из входов блока 11 индикации, а другой выход - с входом блока 13 регистрации.
Способ осуществляют следующим образом.
Сигнал ЭМЭ, принятый трехкомпонент- ным датчиком 1 (три идентичных ортогональных датчика, магнитные диполи), усиливают и подают в блок 2 АЦП данных ЭМЭ, где обрабатывают и затем - в схему 3 вычисления напряжения вектора ЭМЭ, далее заносят в блок 4 памяти канала ЭМЭ с учетом полярности относительно выбранной системы отсчета (направление оси выработки, скважины). Одновременно сигнал подают в блок 5, где происходит отсчет времени сигналов АЭ. Сигнал АЭ, принятый трехкомпонентным датчиком 6, усиливают и подают для обработки в блок 7 АЦП данных (который открывают сигналом запуска с блока 2), где обрабатывают и подают в схему 8 вычисления вектора АЭ.
Далее сигналы ЭМЭ и АЭ из блоков 4 и 8 идут на схему 9 сравнения векторов напря- женностей ЭМЭ и АЭ. При совпадении направлений векторов из схемы 9 подают команду для прекращения счета времени в схеме 10 и команду в блок 11 индикации для отображения данных по направлению векторов. Со схемы 8 вычисления направления вектора АЭ сигнал также подают в блок 12 вычисления (после сигнала со схемы 9).
По заданной скорости распространения АЭ в массиве, введенной в блок АЦП АЭ, по времени пробега импульсов АЭ и амплитуде импульсов АЭ, в блоке 12 рассчитывают расстояние до источника ЭМЭ и АЭ, его координаты относительно выработки (скважины), декремент затухания АЭ, величину энергии импульса АЭ в очаге АЭ и по этим данным оценивают напряженность
0 массива. Данные, вычисленные в блоке 12, подают в блок 11 индикации.
Вместо устройства индикации (или параллельно с ним) возможна регистрация данных в печатающем устройстве или в дол5 говременной памяти, на магнитном носителе.
Схема осуществления способа (фиг. 2) содержит очаг 14 акустической (АЭ) и электромагнитной (ЭМЭ) эмиссии, место 15 рас0 положения приемных устройств АЭ и ЭМЭ, очаги 16 и 17 АЭ или ЭМЭ. Кроме того, на схеме обозначены: Нх, Ну, Hz - составляющие ЭМЭ или АЭ; Не - суммарный вектор, его направление и модуль; BiBa - направле5 ние на очаг АЭ и ЭМЭ; а - телесный угол между направлением векторов АЭ и ЭМЭ; S - расстояние от очага до точки приема.
Способ осуществляют следующим образом.
0 На поверхности выработки в точке 15 устанавливают датчик ЭМЭ и рядом забуривают шпур глубиной до 0,5 м. туда помещают датчик АЭ. Шпур заполняют водой или заделывают другим высокоскоростным ма5 териалом для обеспечения надежного и оди- накового акустического переходного сопротивления по всем трем направлениям (компонентам) датчика.
В очаге 14 АЭ и ЭМЭ происходит излу0 чение АЭ и ЭМЭ и в окружающем пространстве распространяются электромагнитные и акустические волны. В связи с высокой скоростью распространения электромагнитной волны ее приход в точку 15 приема
5 можно считать мгновенным.
Приемным устройством принимают три компонента импульса ЭМЭ, вычисляют направление и модуль вектора, заносят в электронную память и запускают счет времени.
0 Импульс АЭ приходит в точку 15 через интервал времени где V - скорость распространения упругой волны в массиве, которую можно определить, например, с помощью аппаратуры сейсмоэлектрического
5 метода.
Если направление волны АЭ совпадает с направлением волны ЭМЭ, отсчитывают время прохождения волны АЭ, вычисляют расстояние до очага по величине скорости волны АЭ, а векторы ЭМЭ и АЭ даютнаправление на очаг. Кроме того, рассчитывают мощность импульсов АЭ и ЭМЭ в очаге. Точность совпадения направления задают величиной телесного угла а- угла совпадения направления векторов. В зависимости от расстояния, необходимого для исследования, допуски по величине телесного угла, характеризующего совпадение направлений векторов ЭМЭ и АЭ, изменяются:
а - 10-20° для малых расстояний (10- 20 м);
а - 5-10° для расстояний 20 м.
Для более однозначного и уверенного определения направления положения очага и интенсивности излучения производят на- копление импульсов, идущих от источника как ЭМЭ, так и АЭ. Сигналы от очагов (источников) 16 и 17, дающих сигналы только ЭМЭ или только АЭ, не накапливают.
Информация с выводов блока индика- ции выводится на ЭВМ типа ДВК-2, ДВК-3 и др.
Формула изобретения Способ определения координат очага акустической и электромагнитной эмиссии,
включающий измерение средней скорости распространения сейсмоакустического сигнала, регистрацию времени прихода электромагнитных и сейсмоакустических сигналов, определение времени запаздывания сейсмоакустического сигнала относительно электромагнитного, регистрацию электромагнитных и сейсмоакустических сигналов, излучаемых источниками электромагнитной и акустической эмиссии, определение зависимости интенсивности электромаг- нитныхи сейсмоакустических сигналов от расстояния до источников этих сигналов, отличающийся тем, что, с целью повышения достоверности оценки напряженного состояния массива горных пород за счет повышения точности определения координат очага электромагнитной и акустической эмиссии и за счет снижения информации, вызванной искусственными помехами, регистрируют по три компонента электромагнитной и акустической эмиссий и при совпадении векторов напряженностей электромагнитной и акустической эмиссий определяют направление на источник акустической и электромагнитной эмиссии по вектору совпадения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля напряженного состояния массива горных пород | 1988 |
|
SU1627695A1 |
| Устройство для определения координат источника акустической эмиссии | 1989 |
|
SU1712918A1 |
| Устройство для контроля напряженного состояния массива горных пород | 1990 |
|
SU1816860A1 |
| Способ сейсмоакустического распознавания удароопасного состояния массива горных пород и устройство для его осуществления | 1988 |
|
SU1652609A1 |
| Устройство для оценки напряженного состояния массива горных пород | 1988 |
|
SU1629533A1 |
| Способ предотвращения горно-тектонических ударов | 1989 |
|
SU1645558A2 |
| Способ определения удароопасности участков массива горных пород и устройство для его осуществления | 1987 |
|
SU1553717A1 |
| Способ и система сейсмоакустического контроля массива горных пород | 2023 |
|
RU2809469C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ УДАРО- И ВЫБРОСООПАСНОСТИ ГОРНЫХ ПОРОД | 1994 |
|
RU2071563C1 |
| Способ определения местоположения источников акустической эмиссии в массиве горных пород | 2020 |
|
RU2753166C1 |
Изобретение относится к горному делу и м.б. использовано для дистанционного неразрешающего контроля очагов напряженного состояния горного массива. Цель - повышение достоверности оценки напряженного состояния массива горных пород за счет повышения точности определения координат очага электромагнитной и акустической эмиссии и за счет снижения информации, вызванной искусственными помехами. Измеряют среднюю скорость распространения сейсмоакустического сигнала. Регистрируют время прихода электромагнитных и сейсмоакустических сигналов. Определяют время запаздывания сейсмоакустического сигнала относительно электромагнитного.Регистрируют электромагнитные и сейсмоакустические сигналы, излучаемые источниками электромагнитной и акустической эмиссии. Опреце- ляют зависимость интенсивности электромагнитных и сейсмоакустических сигналов от расстояния до источников этих сигналов. Регистрируют по три компонента электромагнитной и акустической эмиссии. При совпадении векторов напряженностей электромагнитной и акустической эмиссий определяют направление на источник акустической и электромагнитной эмиссий по вектору совпадения. Для более однозначного и уверенного определения направления положения очага и интенсивности излучения производят накопление импульсов. 2 ил. Ё
Фиг.
в,
Фиг.2
| Способ оценки напряженного состояния горного массива | 1983 |
|
SU1146448A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ оценки напряженного состояния массива горных пород и устройство для его осуществления | 1983 |
|
SU1209859A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
