(21)4204442/23-03
(22)02.03.87
(46) 15.07„89. Бюл. tc 26 (75) В.В.Габон, Э.А.Загривный, Г.И.Коршунов и С.ПоГонтарь (53) 622,284(088.8) (56) Авторское свидетельство СССР № 1004651, кл. Е 21 D 23/00, 1977. Разработка научных основ технологии и средств выемки угля без постоянного присутствия людей в забое. Проведение технико-экономических исследований по созданию технологии и средств выемки угля без постоянного присутствия людей в забое и роботизации шахтных процессов. - Отчет ИГД имо А.А.Скочинского, Госрегистрация № 21829042883, Люберцы, 1982, с.34-36„
(54) ВЫЕМОЧНЫЙ ФРОНТАЛЬНЫЙ АГРЕГАТ (57) Изобретение относится к горному делу, а именно к выемочным фронтальным агрегатам. Цель - снижение энергоемкости разрушения угля путем обеспечения независимой обработки забоя на каждом участке в различных направлениях. Выемочный фронтальный агрегат состоит из секций крепи (СК) конвейера 3 и исполнительного органа. Каждая СК состоит из основания 4, гидгюстоек 5, перекрытия. На основании 4 СК установлена стойка 13 и гидродомкрат подъема. На стойке 13 шарнирно установлена платформа 1I. Рукоять 7 выполнена телескопической с двуплечим коромыслом (ДК) 9 на одном конце и режущей головкой 8 на противоположном конце. Платформа 1I связана с ДК 9 вертикальной осью 10 и гидродомкратамн качания 12. Каждая СК перемещается гидродомкратом передвижения. Раз рушение забоя осуществляется качанием рукоятей 7 независимо на каждой СК, Рукоять 7 телескопически раздвигается и может перемещаться в необходимом направлении Перемещение рукояти 7 осуществляется гидродомкратами качания 12 через ДК 9 и гидродомкратом подъема. 3 ил.
сл
4
:о
00
;о
00
Изобретение относится к горной промышленности и может быть использовано при обработке пластовых месторождений полезных ископаемых фрон- тальными агрегатами.
Цель изобретения - снижение энергоемкости разрушения угла путем обеспечения независимой обработки забоя на каждом участке в различных направ- лениях.
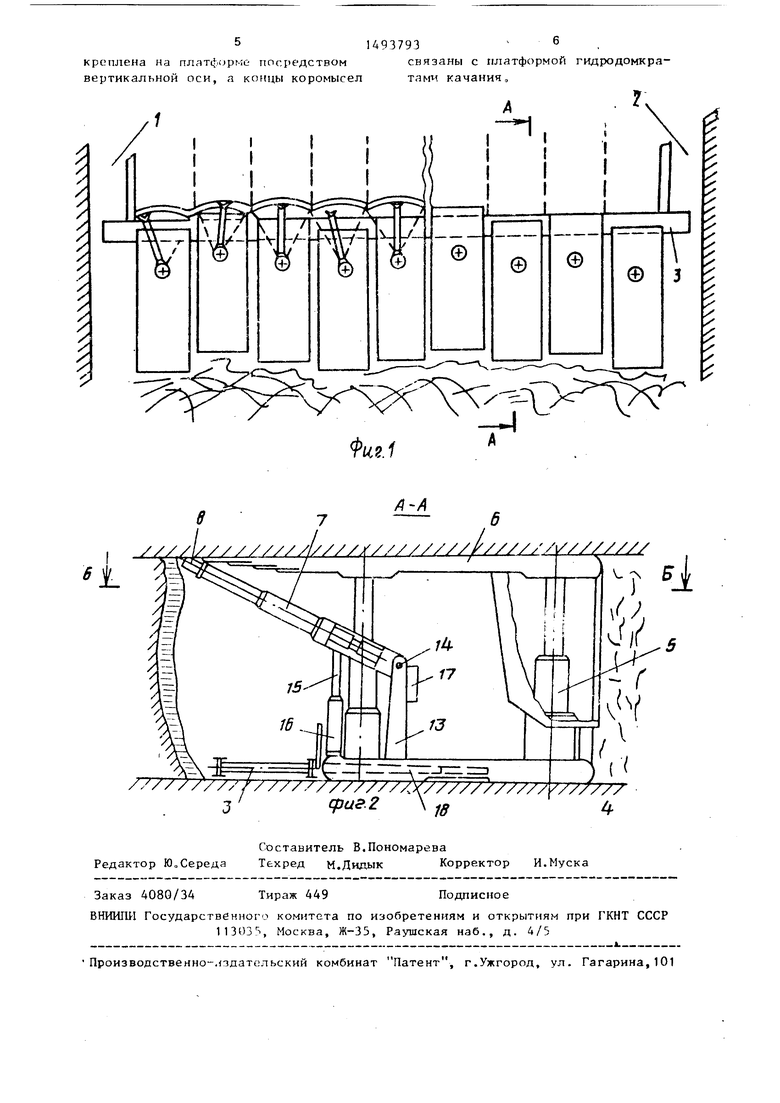
i На фиго 1 изображена принципиальная схема агрегата; на фиг.2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.2.
Между штреками 1 и 2 монтируется фронтальный агрегат, состоящий из отдельных модулей, конвейера 3 и вспомогательного .оборудования (перегружатель, энергопоезд и др. не показа ны). Модуль состоит из секции крепи, включающей основание 4, две гидростойки 5, перекрытие 6. Исполнительный орган состоит из рукоятки 7 с рабочей головкой 8 с одной стороны (со стороны забоя) и двуплечего коромысла 9 с другой„Коромысло 9 шарнир- но на вертикальной оси 10 закреплено на несущей платформе 11 и связано обеими плечами со штоками двух гидро- домкратов 12 качания, также установленных на платформе 11 под углом к продольной оси секции крепи по разные от нее стороны. Платформа 11 завальной стороной закреплена на стойке 13 посредством оси 14 с возможностью качания вокруг нее и связана со штоком 15 гидродомкрата 16 подъема, установленного перед первой гидростойкой секции крепи вертикально на ос- новании 4. Стойка 13 установлена на основании 4 и несет гидроблок 17 ручного и автоматического управления модулем.
Для передвижения секции крепи слу- жат гидродомкрат 18 передвижения,связанный с базой, роль которой может выполнять конвейер.
Выемочный фронтальный агрегат работает следующим образом, Параллельные участки забоя отрабатываются независимо друг от друга с помощью рукоятей 7 модулей агрегата, причем обработка поверхности указанных участков осуществляется ере- зами по напластыванию. В зависимости от вылета рукояти 7 длина дуг и соот- ветственм(1 ширина обрабатьшаемых участков может изменяться Толщина среза регулируется телескопическим изменением вылета рукояти 7.
Каждый модуль агрегата подключен к трубопроводам гидросистемы и может работать в автоматическом или ручном (при наладке, ремонте, выборе режима работы) режимах работы, при этом гидро домкраты 12 качания производят качание стрелы 7 в плоскости пласта, а гидродомкрат 16 подъема одновременно или раздельно с гидродомкрата ми 12 осуществляет перемещение рукояти 7 в вертикальной плоскости. Взаимная работа этих гидродомкратов дает более сложное движение, вплоть до работы по окружности.
После обработки забоя своего участка на величину шага передвижки снимается распор с секции крепи модуля до установленной величины подпора . или вплоть до разрыва контакта перекрытия 6 с кровлей, уменьшается вылет рукоятки 7, секция перемещается к конвейеру 3. Осуществляется распор секциИо Корректируется режим работы модуля с учетом изменений горногеологических условий участка и вновь цикл обработки повторяется.
Формула изобретения
Выемо чный фронтальный агрегат, включающий базу, связанную гидродомкратами передвижения с секциями крепи, содержащими основания, связанные гидростойками с перекрытиями, рукояти исполнительного органа, на забойных концах которых закреплены резцовые головки, а на их завальных концах - гидродомкраты качания и подъема, отличающийся тем, что, с целью снижения энергоемкости разрушения угля путем обеспечения независимой обработки забоя на каж-г дом участке в различных направлениях каждая секция крепи снабжена стойкой, которая жестко закреплена на основании с завальной стороны по отношению к гидродомкрату подъема, и платформой, шаркирно закрепленной одним концом на стойте, а другим концом связанной с гидродомкратом под бе ма, каждая рукоять выполнена с двуплечим коромыслом на завальном конце и телескопической вдоль своей оси, при этом средняя часть коромысла завертикальной оси, а KOfiubi коромысел
/
/ /,
/
/ X / X X X X X
X
X
fw2.f
тами качания,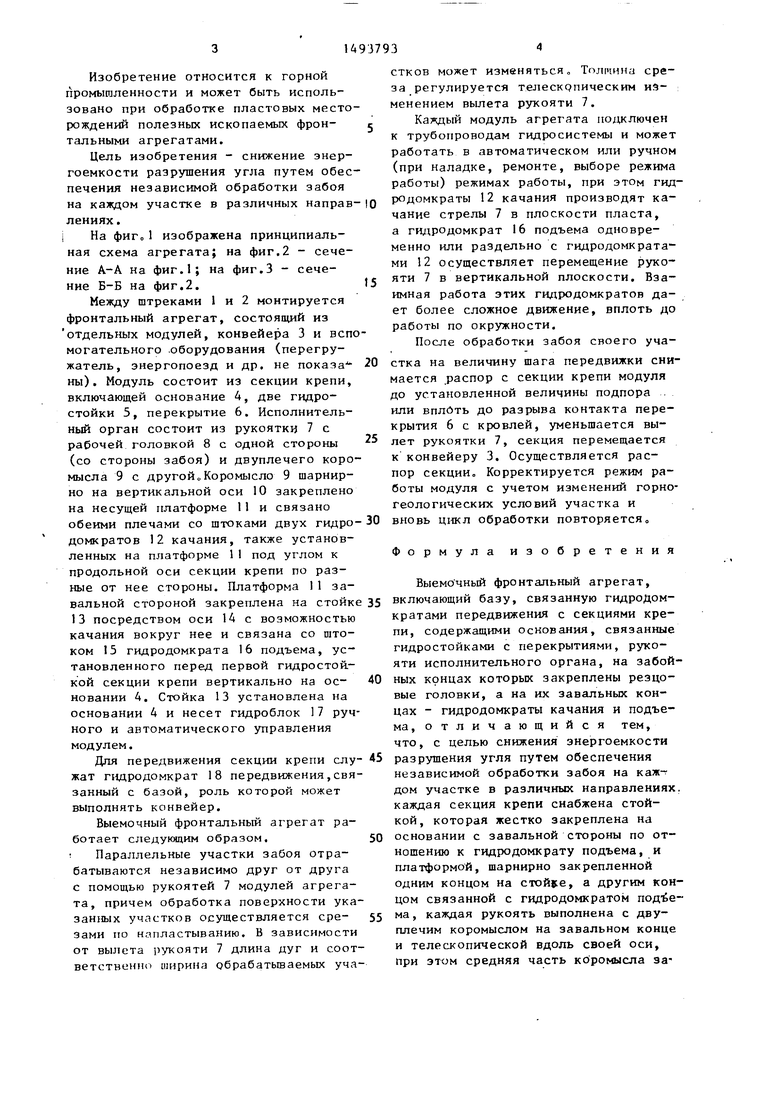
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЕМОЧНЫЙ МОДУЛЬ | 2010 |
|
RU2459076C1 |
| Фронтальный очистной агрегат | 2002 |
|
RU2224111C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Механизированная крепь для тонкихКРуТыХ плАСТОВ | 1979 |
|
SU844775A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2006 |
|
RU2324820C1 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Механизированный комплекс | 1986 |
|
SU1507986A1 |
| СЕКЦИЯ КРЕПИ ОЧИСТНОГО МЕХАНИЗИРОВАННОГО КОМПЛЕКСА | 1991 |
|
RU2027012C1 |
| Выемочный комплекс | 1987 |
|
SU1434123A1 |
| Секция механизированной крепи | 1989 |
|
SU1752974A1 |
Изобретение относится к горному делу, а именно к выемочным фронтальным агрегатам. Цель - снижение энергоемкости разрушения угля путем обеспечения независимой обработки забоя на каждом участке в различных направлениях. Выемочный фронтальный агрегат состоит из секций крепи /СК/, конвейера 3 и исполнительного органа. Каждая СК состоит из основания 4, гидростоек 5, перекрытия. На основании 4 СК установлена стойка 13 и гидродомкрат подъема. На стойке 13 шарнирно установлена платформа 11. Рукоять 7 выполнена телескопической с двуплечим коромыслом /ДК/ 9 на одном конце и режущей головкой 8 на противоположном конце. Платформа 11 связана с ДК 9 вертикальной осью 10 и гидродомкратами качания 12. Каждая СК перемещается гидродомкратом передвижения. Разрушение забоя осуществляется качанием рукоятей 7 независимо на каждой СК. Рукоять 7 телескопически раздвигается и может перемещаться в необходимом направлении. Перемещение рукояти 7 осуществляется гидродомкратами качания 12 через ДК 9 и гидродомкратом подъема. 3 ил.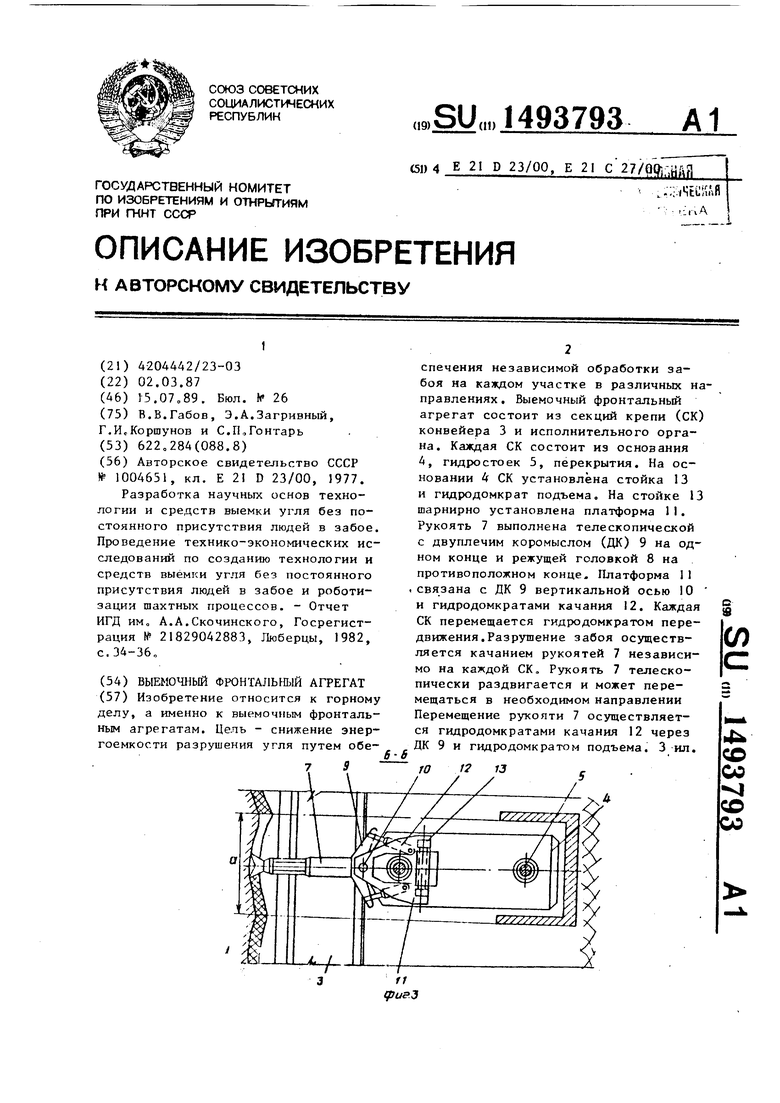
л-/4 876
//// ///// /// /I/// ///// /////h/y/y/y ///////
1
/ /////// f///////////// У/////
л Фиг.2 10
18
////
10
18
/////7 4
