Изобретение относится к электротехнике, в частности к компенсации реактивной мощности динамических нелинейных нагрузок питающей сети
Цепь изобретения - повьппение эффективности регулирования путем уменьшения величины динамической ошибки компенсации реактивной мощности.
Сущность предложенного способа заключается в следующем. На каждом
интервале дискретности измерения
с
мгновенные значения напряжения питающей сети и тока нагрузки сети синхронно измеряются и запоминаются. Сигнал управления Y потребляемой нагрузкой,пропорциональный величине реактивной мощности
Y ILU(K)i(K-l)-U(K-l)i(K)L(l) kii
гле и(к), U(K-|) - мгновент,1е значения напряжения питающей сети в
К и К-1 моменты времени;
1(К), 1(К-1) - мгновенные значения тока нагрузки питающей сети в К и К-1 момен ты времени; п - количество измерений мгновенного значения тока и напряжений за время,равное периоду дискретности статического компенсатора о Поскольку инерционность тиристор- но-регулируемого статического компенсатора соизмерима со скоростью изменения реактивной мощности нагрузки питающей сети для устранения динами- ческой опшбки компенсации необходимо определить сигнал управления с упреждением,
Лля вычисления сигнала управления с упреждением.определяется тен- денция (скорость изменения реактивной мощности нагрузки сети и учитывается следующим образом о На каждом интервале дискретности статического компенсатора величина, вычисленная по формуле (1), запоминается.Сигнал управления определяют к началу дискретности как сумму запомненной величины на данном периоде дискретности и разности между запомненными величи нами на данном и предьщущем периодах дискретности статического компенсатора.
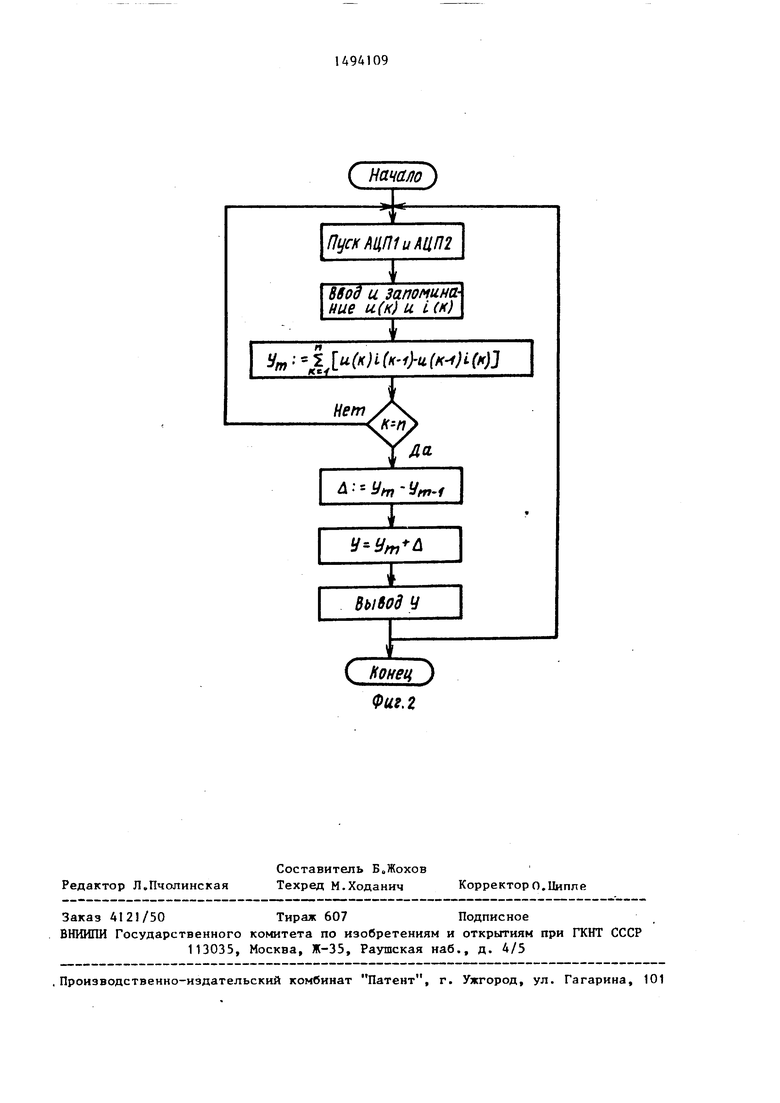
На фиг.1 приведено устройство, реализующее предлагаемый способ; на фиг. 2 - алгоритм работы блока вычисления (вв).
Входы БВ1 подключены к цифровым выходам двух аналого-цифровых пре- образоватепей (АЦП) 2 и 3, подкгпо- ченных соответственно к трансформатору 4 напряжения и трансформатору 5 тока нагрузки питающей сети 6, а выход RBI подключен на вход управления статическим компенсатором 7.
Устройство работает следующим об- разом.
На каждом интервале дискретности измерения осуществляется синхронный
о
g
5
пуск АЦП 2 и 3 , Результаты преобразования АЦП 2 и 3 вводятся и запоминаются в памяти БВ. Вычисляется сумма произведения мгновенного анализа тока на предыдущем интерв;и1е дискретности измерения на значение тока на данном интервале дискретности и значения тока на данном интервале на значение напряжения на предыдущем интервале в течение периода дискретности пофазного регулирования статического компенсатора и ее значение запоминается Полученная величина суммы произведений Y пропорциональна величине реактивной мощности, потребляемой нагрузкой питающей сети в данный момент времени. Поскольку инерционность отработки сигнала управления тиристорно-регули- руемого статического компенсатора составляет не менее 7 мс, что соизмеримо со скоростью измерения реактивной мощности динамической нагрузки питающей сети такой, как тиристорный преобразователь или дуговая сталеплавильная печь, необходимо учесть изменение реактивной мощности нагрузки за время отработки статическим компенсатором сигнала управления. В противном случае имеет место динамическая ошибка компенсации реактивной мощности, обусловленная инерционностью статического компенсатора.
Для уменьшения динамической ошибки необходимо определить тенденцию изменения реактивной мощности нагрузки сети и вычислить сигнал управления с учетом этой величины,, т.е. с упреждением. Так как полученная величина суммы произведений v на данном периоде дискретности пропроцио- нальна величине реактивной мощности, потребляемой нагрузкой питающей сети в данный момент времени, т.е. определена без запаздывания, то для определения сигнала управления с упреяг- дением достаточно вычислить разность Л между запомненными величинами сумм произведений Y н У |д.,на данном и предыдущем периодах дискретности статического компенсатора. Сигнал управления с упреждением У определяется к началу периода дискретности статического компенсатора как сумма величины Y на данном периоде дискретности и вычисленной разностн Л, который и подается на вход управления статическим компенсатором.
Поскольку сигнал управления вычисляется на основании суммирования произведений мгновенных значений тока и напряжения на интервале дискретности статического компенсатора и определяется с упреждением, существенно уменьшается динамическая ошибка компенсации реактивной мощности нагрузки питающей сети,, то повышает технико-экономическую эффективность применения статического компенсатора при компенсации динамической нелинейной нагрузки питающей сети такой, как тиристорный преобра- зователь или дуговая сталеплавильная печь
Формула изобретения
1 о Способ управления статическим
компенсатором, реактивной мощности, заключающийся в том, что для формирования сигнала управления синхронно измеряют мгновенные значения напряжения и тока на каждом интервале дискретности измерения, запоминают эти значения, вычисляют произведения значения тока на предыдущем интервале дискретности измерения на значение напряжения на данном интервале дискретности измерения и значения тока на данном интервале дискретности измерения на значение напряжения }1л предыдущем интерпале дискретности итмсрения и суммируют по- лучени1 1е пронпнедения, причем чилк величины первого проитпеденип не и:ч меняют, л зилк второго изменяют нл противоположный, отличающи с я тем, что, с целью повышения эффективности регулирования путем уменьшения величины динлм1гческой опшбки компенсации релктияной мощности, суммирование полученных на клждом интервале дискретности измерения произведений мгновенных значений тока нлгрузки и напряжения сети производят в течение периода дискретности статического компенсатора, сигнал управления компенсатором определяют к моменту начала следующе- |ГО интервала дискретности статического компенсатора как результат суммирования
2. Способ по п„1, о т л и ч а ю- щ и и с я тем, что сигнал управления определяют к моменту начала сле- дукяцего интервала дискретности статического компенсатора как сумму запомненной величины результата суммирования на данном интервале дискретности статического компенсатора и величины разности между запомненными результатами суммирования на данном и предыдущем интервалах дискретности статического компенсатора

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации обменной и реактивной мощности | 1986 |
|
SU1480014A1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМ ТИРИСТОРНЫМ КОМПЕНСАТОРОМ РЕАКТИВНОЙ МОЩНОСТИ | 1994 |
|
RU2088015C1 |
| Устройство компенсации реактивной мощности | 1989 |
|
SU1737618A1 |
| Способ динамической компенсации неактивных составляющих мощности | 1988 |
|
SU1550592A1 |
| Способ компенсации искажений токов в многофазных цепях с нелинейными нагрузками | 1988 |
|
SU1571722A1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМ КОМПЕНСАТОРОМ | 2020 |
|
RU2757154C1 |
| ГИБРИДНЫЙ КОМПЕНСАТОР ПАССИВНОЙ МОЩНОСТИ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2001 |
|
RU2187872C1 |
| ОДНОФАЗНЫЙ КОМПЕНСАТОР ПАССИВНОЙ МОЩНОСТИ | 1997 |
|
RU2146848C1 |
| ТРЕХФАЗНЫЙ КОМПЕНСАТОР РЕАКТИВНОЙ МОЩНОСТИ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2368992C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БАЛАНСА НАКОПЛЕННОЙ ЭНЕРГИИ В УСТРОЙСТВЕ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2019 |
|
RU2726474C1 |
Изобретение относится к электротехнике и может быть использовано при построении систем управления статическими компенсаторами реактивной мощности динамических нелинейных нагрузок питающей сети. Цель изобретения - повышение эффективности регулирования путем уменьшения величины динамической ошибки компенсации реактивной мощности. Синхронно измеряют мгновенные значения напряжения питающей сети и тока нагрузки и их значения запоминают. Вычисляют сумму в течение периода дискретности статического компенсатора произведений тока на предыдущем интервале измерения на напряжение на данном интервале измерения и тока на данном интервале на напряжение на предыдущем интервале, причем знак величины первого произведения не изменяют, а знак второго изменяют на противоположный. Величину суммы вычисленных произведений запоминают. Сигнал управления определяют к началу периода дискретности статического компенсатора как сумму запомненной величины на данном периоде дискретности и разности между запомненными величинами на данном и предыдущем периодах дискретности статического компенсатора. 1 з.п. ф-лы, 2 ил.
Питамщан есть
П
S/
:
ttJ.f
Пуп АЦП1 и 1(ЦП2
Ввод и Запоминание и (к) и L (К)
Ут 2 «Cf if - laM WJ
КЧ
Нет
hi Ут
С ffoffefj Фиг. 2
С Иача/io
Зап к)
-У
hi Ут-1
1
У -Ут I
1
Выбод У
| Парогенератор | 1989 |
|
SU1638444A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - etz Archiv, 1982, Bd.4. | |||
