Изобретение относится к электроэнергетике и электротехнике, в частности к компенсации реактивных нагрузок в промышленных и автономных электрических сетях с помощью статических вентильных компенсаторов.
Цель изобретения - повышение точности компенсации искажений токов и расширение функциональных возможностей при несинусоидальном питающем напряжении.
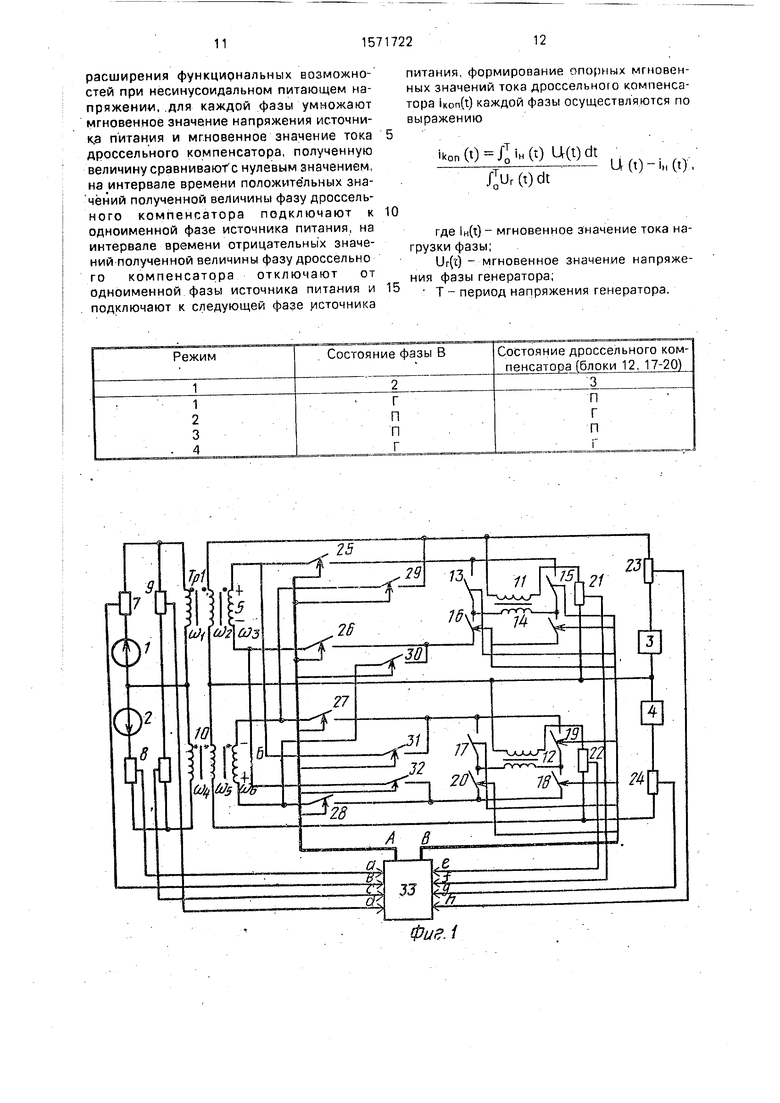
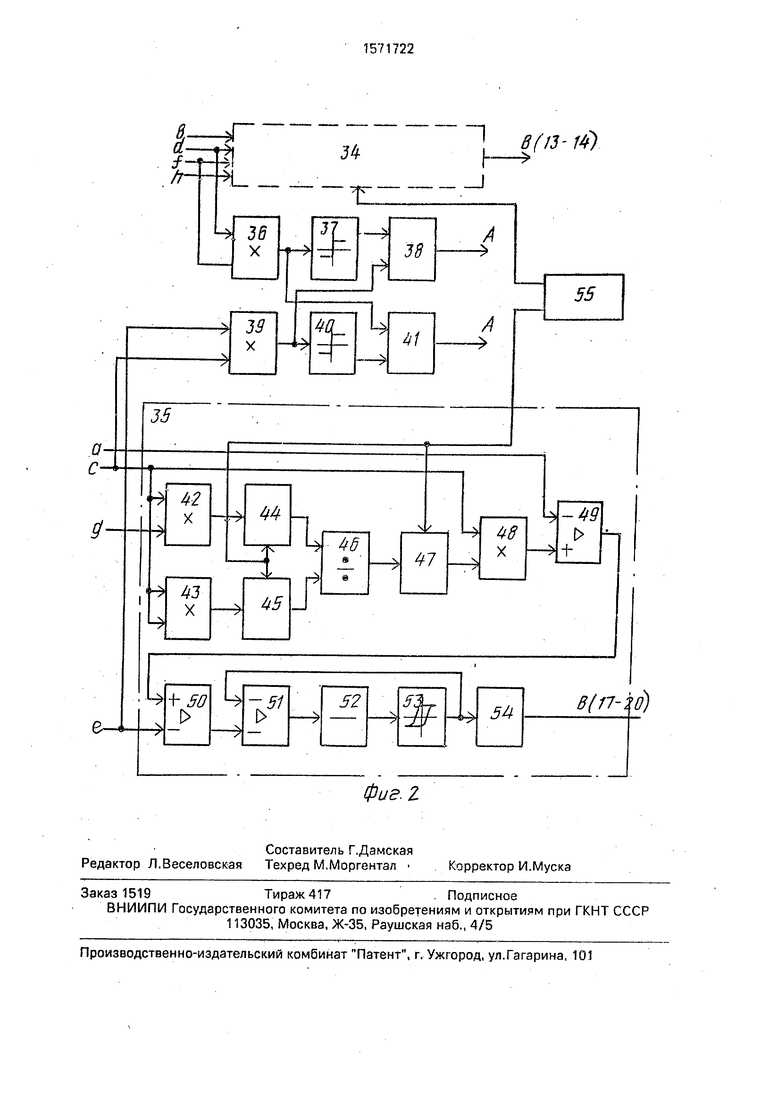
На фиг. 1 изображена структурная схема компенсатора; на фиг. 2 - структурная
схема системы управления устройством компенсации искажений токов.
Компенсатор содержит двухфазный источник с фазами 1, 2, двухфазную нагрузку с фазами 3, 4, трансформаторы 5 и 6, датчики 7 и 8 тока, датчики 9 и 10 напряжения, трансфооматоры 11 и 12, ключевые элементы (вентили) 13-20, датчики 21-24 тока, ключевые элементы (вентили) 25-32, систему 33 управления.
Система 33 управления (фиг. 2) содержит схемы 34 и 35 для управления переключением первичной обмотки трансфер
XJ
гО Ю
маторов 11 и 12 соответственно, умножитель 36, компаратор 37, формирователь 38 импульсов управления вентилями, умножитель 39, компаратор 40, формирователь 41 импульсов управления вентилями, умножители 42 и 43, интеграторы 44 и 45, делитель 46. схему 47 дискретизации с запоминанием отсчетов, умножитель 48. сумматоры 49- 51. блок 52 запаздывания первого порядка, компаратор 53 с гистерезисом, формирователь 54 импульсов управления вентилями, блок 55 синхронизации.
Силовая часть, подсоединяемая между двумя фазами источника питания ед(т)-1, ев(г)-2, последовательно с которыми включены соответственно первый 7 и второй 8 датчики тока, а параллельно - первый 9 и второй 10 датчики напряжения и двумя фазами нагрузки ZA 3, ZB 4, последовательно с которыми включены соответственно пятый 23 и шестой 24 датчики тока, гальванически развязана через первый 5 и второй 6 трансформаторы и содержит две группы управляемых вентилей, причем в первой группе вентили 13-16 включены по мостовой схеме, в одну диагональ которой включена пер вичная обмотка третьего трансформатора 11, а узлы второй диагонали через рентили 25 и 26 подсоединены к вторичной обмотке од первого трансформатора 5 и через венти ли 29, 30 подсоединены к вторичной обмот ке ад второго трансформатора 6, вторичная обмотка третьего трансформатора 11 последовательно с третьим датчиком тока 21 включена параллельно к фазе А нагрузки 3, во второй группе вентили 17-20 включены по мостовой схеме, в одну диагональ которой включена первичная обмотка четвертого трансформатора 12, а узлы второй диагонали через вентили 27 и 28 подсоединены к вторичной обмотке Уе второго трансформатора 6 и через вентили 31 и 32 подсоединены к вторичной обмотке со з первого трансформатора 5, вторичная обмотка четвертого трансформатора 12 последовательно с четвертым датчиком 22 тока включена параллельно к фазе В нагрузки 4, управляющие выводы вентилей 13-20, 25-32 подсрединены к выходам системы 33 управления, входы которой соединены с выходами датчиков 7 и 8, 21-24 тока и датчиков 9 и 10 напряжения.
В системе управления, изображенной на фиг. 2, входы схем 34 и 35 управления переключением первичных обмоток трансформаторов связаны с выходами датчиков 7 и 8, 21-24 тока и датчиков 9 и 10 напряжения, а выходы блоков 34, 35 - с управляющими входами вентилей 13-20, входы умножителей 36 и 39 связаны с выходами датчиков 7, 8, 21 и 22, выходы умножителей 36 и 39 соответственно через компараторы 37 и
40 подключены к входам формирователей 38 и 41 импульсов управления вентилями, выходы которых подключены к управляющим входам вентилей 25-32, причем в схеме 35 управления переключением
0 первичной обмотки трансформатора 12 входы умножителя 42 связаны с выходами датчиков 10 и 24, входы умножителя 43 - с выходом датчика 10, выход умножителя 42 - с входом интегратора 44, выход которого
5 соединен с перпым входом делителя 46, выход умножителя 43 связан с входом интегратора 45, выход которого связан с вторым входом делителя 46, выход делителя 46 через схему 47 дискретизации с запомииани0 ем отсчетов связан с первым входом умножителя 48, второй вход которого подключен к выходу датчика 10, выход умножителя 48 подсоединен к неинвертирующему входу сумматора 49 у кот j инвертиру5 ющий вход подключен к выходу датчика 8 тока, а выход - к неичвертирующему входу сумматора 50, инвертирующий вход которого связан с выходом датчика 22 тока, выход сумматора 50 подключен к неинвертирую0 щему входу сумматора 51, выход которого через блок 52 запаздывания первого порядка м компаратор 53 с гистерезисом соединен с входом формирователя 54 импульсов управления вентилями выходы которого
5 связаны с управляющими электродами четырех управляемых вентилей 17-20, выход компаратора 53 с гистерезисом связан также с инвертирующим входом сумматора 51, выходы блока 55 синхронизации соединены
0 с регулирующими входами интеграторов 44 и 45 и схемы 47 дискретизации с запоминанием отсчетов
Способ осуществляется следующим образом
5В соответствии со способом компенсации искажений тока в многофазных цепях измеряют мгновенные значения напряжения источника питания и тока нагрузки, производят разделение тока нагрузку на
0 активную и реактивную составляющие на интервалах периода работы когда одноименные i e фазы источника питания и компенсатора работают з генераторном режиме или 1-я фаза компенсатора работает
5 в генераторном режиме, а i-я фаза нагрузки - в режиме потребления энергии, i-ю фазу компенсатора подключают к i-й фазе источника питания, имеющей на этом интервале противоположную полярность напряжения по сравнению с i и фазой формируют ток
компенсатора, включенного параллельно нагрузке, равным противоположным значениям реактивной составляющей тока нагрузки.
Таким образом, ток, потребляемый от источника питания, становится равным активной составляющей тока нагрузки, т.е форма потребляемого от источника питания тока совпадает с формой напряжения на его зажимах, и повышается точность компенсации искажений, когда одноименные I- е фазы источника питания работают в генераторном режиме,
Разделение тока нагрузки iH(t) на составляющие ia(t) и ip(t) для каждой фазы происходит следующим образом
Если напряжение одной фазы источника питания есть произвольная периодическая с периодом Т функция Ur(t). то ток нагрузки iH(t) можно представить в виде суммы активной и реактивной составляющих.
iH(t)la(t)+ip(t).
где la(t) P/U2flUr(t); P jSJ0 iH(t)Ur(t)dt активная мощность, потребляемая нагрузкой;
1)д - действующее значение напряжения источника питания. Для токов ia(t) и ip(t) выполняются соотношения:
Т/о ia(t)Ur(t)dt P;
Т/о IpWUrMdt 0 .
(1)
Если параллельно нагрузке подключить компенсатор с током iK(t) -ip(t), то ток ir(t), потребляемый от источника питания, будет равен
ir(t) lH(t) + iK(t) ia(t).(2)
При этом компенсатор согласно выражению (1), не будет потреблять реактивную мощность.
Рассмотрим формирование алгоритмов подключения фаз дроссельного компенсатора к фазам источника питания при генерации i-й фазой компенсатора тока ip.i(t) в соответствии с выражением (1). При формировании таких алгоритмов необходимо подводить реальный баланс в системах электропитания, содержащих многофазные цепи с нелинейными элементами, в частности вентильные преобразователи. Для определения баланса электроэнергии необходимо учитывать особенности таких целей: большое число переключений вентилей на периоде работы, искажения токов и напряжений, различная интенсивность преобразования электромагнитной энергии в другие виды, отключение элементов системы друг от друга, изменение характера на- -рузки (cos а нагрузки) Определение
1Контролируемое сечение системы - сечение системы, в котором определяются
значения мгновенных токов и напряжений,
2Энергетически неизменное состояние (ЭНС) системы - состояние системы, характеризующееся интервалом работы
0 (ti-ti-i), для которого потоки мгновенных значений энергии через контролируемые сечения являются неизменными по направлению.
Введем обозначения- пэнс число ЭНС
5 системы; пгг{пгн) - число фаз источника питания- Пцг(пнн) число фаз нагрузки, работающих в режиме генерации (потребления) электроэнергии, /Уг,(Л/гн)- энергия, генерируемая (потребляемая) фазами генерато0 ров; Л/нг(Л/нн) - энергия, генерируемая (потребляемая) фазами нагрузок, fi, 12, гз. Т4 - функции целочисленных переменных, устанавливающие связь между порядковым номером фазы источника питания или на5 грузки, ЭНС системы и индексами суммирования j, k, I, m. Баланс электроэнергии в системе для множества контролируемых сечений
пэнсnrr i
ЛНМ
Ј (( 2 Wrr.fl(i,j)+2 I Wnr f2(l.k)l V
- 1 х х I 1k 1
i 1 v j
ПНН
35
2 WHH fa (i.e) + I 1
ПГН
+ 2 I Л/гн
m 1
.m) I ))0
(3)
40
Величина пнэс, Пп-.i, nHrj, ПннЛ пГц.1, составляющие энергии, вид функции fi, f2, тз. f4 определяются на основании расчета энергетического режима в системе.
Из уравнения баланса (3) следует, что
каждое из множеств фаз источника питания и нагрузки разбивается на два подмножества. К первым таким подмножествам относятся элементы, работающие в режиме
генерации электромагнитной энергии, а к вторым - в режиме потребления. При этом мгновенные и интегральные за время to() величины энергии, генерируемые и потребляемые элементами
многофазной цепи, равны.
По предлагаемому способу ЭНС системы, при которых фазы источника питания работают в режиме потребления электромагнитной энергии, а фазы нагрузок - в режимах потребления или генерации электромагнитной энергии или фазы источника питания работают в режиме потребления, а фазы нагрузок-- в режиме генерации, должны быть исключены. При ЭНС, когда фазы источника питания работают в режиме генерации, а фазы нагрузок - в режиме потребления, форма тока компенсатора i«(t) должна удовлетворять условиям (1) и (2)
Формирование требуемого закона изменения тока 1кй на интервалах ЭНС, когда рассматриваемая фаза источника питания работает в режиме генерации, а фаза нагрузки - в режиме потребления, либо данная фаза источника питания и нагрузки работают в режиме генерации, а фаза нагрузки - в режиме потребления, либо данная фаза источника питания и нагрузки работают в режиме потребления электромагнитной энергии, осуществляется за счет широтно-импульсной модуляции сигнала, поступающего на соответствующий дроссельный компенсатор от одноименной фазы источника питания. Для устранения других типов ЭНС, когда i-я фаза нагрузки работает в режиме генерации электромагнитной энергии, генерация требуемой формы тока компенсатора осуществляется за счет подключения к данной i-й фазе компенсатора следующей фазы источника питания Режим работы такой фазы компенсатора иной по сравнению с режимом работы 1-й фазы нч грузки При этом напряжение следующей фазы источника питания имеет напряжение, которое противоположно по знаку по отношению к i-й фазе нагрузки
Исходя из изложенного, алгоритм работы устройства, реализующего данный способ, состоит в выполнении следующих этапов:
измерение мгновенных значений тока и напряжения фаз источника питания, а также тока дроссельного компенсатора и нагрузки;
определение фазы источника питания, которая должна подключаться к i-й фазе дроссельного компенсатора;
формирование эталонных сигналов го- ка компенсатора;
отслеживание мгновенных значений тока дроссельного компенсатора.
Рассмотрим работу цепи с нелинейными элементами, содержащей две фазы - А и В.
Устройство, изображенное на фиг. 1 и 2 и реализующее предложенный способ компенсации токов в многофазных цепях с нелинейными элементами, работает следующим образом.
С помощью датчиков 7, 8, 21-24 тока и 9 и 10 напряжения осуществляется гальваническая развязка, согласование уровней сигналов энергетических цепей и
измерительной частм устройства, а также измерение мгновенных значений напряжений фаз источника питания UA(T), L)B(t), тока фаз источника питания д(г), isft), тока дроссельного компенсатора in(t), ii2(t), тока фаз
нагрузки izA(t), IzB(t). Выходное напряжение этих датчиков, пропорциональное измеренным значениям токов и напряжений, поступает на вход системы 33 управления, которая и вырабатывает управляющие импульсы на вентили 13-20, 25-32.
Введенные первый 5 и второй 6 трансформаторы осуществляют гальваническую развязку не только источников питания (обмотки СУ1, а) А с преобразователем и нагрузкой (обмотки 0)2, со б), но и с источником питания дроссельных компенсаторов, построенных на основе трансформаторов 11 и , 12 (обмотки сиз, л е).
Формирование управляющих импульсов на вентили рассмотрим на примере фазы В. Для этого проанализируем работу блоков 35, 39-41,55
В зависимости от значений токов и напряжений, снимаемых с датчиков 8, 10, 22 и
24, питание дроссельного компенсатора ьа базе трансформатора 12 осуществляется либо от обмотки трансформатора 6 или обмотки ш трансформатора 5 На периоде работы в соответствии с выражением (3) в
общем случае можно выделить четыре характерных режима работы приведенных в таблице, где введены обозначения Г - генераторный режим, П - режим потребления При режиме работы 1 дроссельный компенсатор на базе трансформатора 12 подключается к второму трансформатору 6. При этом ключи 27 и 28 находятся в замкнутом состоянии, а ключи 31, 32 - в разомкнутом. Для компенсации искажений токов требуется устранение режимов работы 2-4.
В соответствии с предлагаемым способом при наличии режимов 1 и 3 на периоде работы схемы формирование тока u(t) в соответствии с выражениями (1) и (2) осущест0 аляется за счет широтно-импульсной модуляции сигнала, поступающего на вход дроссельного компенсатора (блоки 12, 17- 20) от фазы В источника питания Для этих режимов дроссельный компенсатор подключей к фазе В источника питания, При- наличии режимов работы 2 и 4 дроссельный компенсатор на базе трансформатора 12 отключается от трансформатора 6 и подключается к трансфоматору 5 т е к фазе
источника питания (ключи 27 и 28 - в разомкнутом состоянии, ключи 31 и 32 - в замкнутом), .
Выработка управляющих импульсов на ключи 25-32 производится формирователями импульсов на основе информации, поступающей с блоков 36, 37, 39 и 40, в соответствии с изложенным выше.
На примере блока 35 рассмотрим формирование заданной формы тока компенсатора в соответствии с информацией, снимаемой с датчиков 8, 22 и 24 тока и 10 напряжения.
Сигнал с выхода умножителя 43, пропорциональный Ur (t), поступает на вход интегратора 45 и интегрируется в течение периода Т. Сигнал с выхода интегратора 45, пропорциональный квадрату действующего значения напряжения Уд , поступает на второй вход делителя 46, на первый вход которого поступает сигнал с выхода интегратора 44, пропорциональный величине активной мощности Р, потребляемой нагрузкой 4 (считаем, что активная мощность, потребляемая ключевыми и реактивными элементами, мала по сравнению со значением Р и величиной этой мощности можно пренебречь). На вход интегратора 44 поступает сиг- нал с выхода умножителя 42. пропорциональный мгновенной мощности P(t) Ur(t)iH(t), который также интегрируется в течение периода Т.
Сигнал с выхода делителя 46, пропорциональный P/U д, поступает на схему 47 дискретизации с запоминанием отсчетов, выходной сигнал которой остается постоянным в течение следующего периода частотного спектра. Сигнал с этого блока подается на вход умножителя 48, на другой вход которого поступает сигнал, пропорциональ- ный Ur(t). На выходе умножителя 48 формируется сигнал, пропорциональный активной составляющей тока нагрузки ia(t) PUr(t)/U д, который поступает на неинвертирующий вход сумматора 49. На инвертирующий вход блока 49 поступает сигнал, пропорциональный мгновенному значению Тока ir(t), что позволяет на выходе сумматора 9 сформировать опорное (эталонное) значение тока компенсатора iK(t) ii(t)on, которое отслеживается с помощью системы лежения на основе блоков 50-53. Для этого на вход блока 50 поступает мгновенное начение ц)ттока дроссельного компенсаора на основе трансформатора 12. Выодной сигнал сумматора 50, пропорциональный величине AiL(t)ii(t)on - iL(t)T. потупает на неинвертирующий вход умматора 51, на инвертирующий вход коорого поступает сигнал с выхода компаратора 53 с гистерезисом. На выходе формируется сигнал, являющийся управляющим для формирователя 54 импульсов управления вентилями. Для осуществления замкну- 5 той системы управления током трансформатора 12 выходной сигнал с сумматора 51 поступает на вход блока 52 запаздывания первого порядка, передаточная функция которого (K/(1+Ts)), а из него на 10 вход компаратора 53 с гистерезисом, за счет релейной характеристики которого и обратной связи на инвертирующий вход сумматора 51 осуществляется непрерывное отслеживание текущим током компаратора 15 ii(t)T опорного значения iL{t)on.
Блок 55 синхронизации вырабатывает синхроимпульсы, период которых равен периоду источника питания. Данные синхроимпульсы управляют работой интеграторов
0 и схем дискретизации с запоминанием отсчетов. Сигналы управления с блока 54 управляют работой вентилей 17-20, включение которых по мостовой схеме позволяет сформировать мгновенную функцию тока дрос5 сельного компенсатора на базе трансформатора 12.
Таким образом, суммирование токов в общем узле в соответствии с выражением (2) позволяет на выходе фазы В источника пи0 тания получить ток ir(t), пропорциональный напряжению Ur(t.
Разработка устройств на основе предлагаемого способа компенсации искажений в многофазных цепях с нелинейными эле5 ментами позволит снизить обменные процессы элементами системы, устранить потери энергии в линии, снизить установленные мощности электротехнического оборудования
0
Формула изобретения Способ компенсации искажений токов в многофазных цепях с нелинейными нагрузками, включающих в себя источник питания
5 переменного тока, подключенную к нему через преобразователь нагрузку и компенсатор, согласно которому измеряют мгновенные значения напряжения генератора, мгновенные значения тока нагрузки и
0 компенсатора, интегрируют сггнал на протяжении интервала времени, равного периоду напряжения генератора, запоминают значения интеграла на время интегрирования, формирую опорные мгновенные зна5 чения тока компенсатора, и в зависимости от полученного отклонения изменяют мгновенные значения тока компенсатора, отличающийся тем, что, с целью повышения точности компенсации искажений токов и
расширения функцирнальных возможностей при несинусоидальном питающем напряжение, для каждой фазы умножают мгновенное значение напряжения источнику питания и мгновенное значение тока дроссельного компенсатора, полученную величину сравнивают нулевым значением, на нтервале времени положительных значений полученной величины фазу дроссельного компенсатора подключают к одноименной фазе источника питания, на интервале времени отрицательных значений полученной величины фазу дроссельно го компенсатора отключают от одноименной фазы источника питания и подключают к следующей фазе источника
питания, формирование опорных мгновенных значений тока дроссельного компенсатора кст(1) каждой фазы осуществляются по выражению
ikon(t)/(t)U(t)dt,
- U(t)-i,,(t)
J (t) dt
10
где ln(t)- мгновенное значение тока нагрузки фазы;
Ur(t) - мгновенное значение напряжения фазы генератора, Т - период напряжения генератора.
1
8(13- Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования электропотребления в энергосистемах с вентильными преобразователями | 1987 |
|
SU1700679A1 |
| Устройство компенсации мощности в цепях с синусоидальными токами и переменной нагрузкой | 1988 |
|
SU1615836A1 |
| Устройство электропитания с компенсацией искажений токов и напряжений системы электропитания | 1987 |
|
SU1576979A1 |
| Устройство компенсации реактивной мощности в цепях с синусоидальными токами и переменной нагрузкой | 1988 |
|
SU1557628A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕАКТИВНОЙ МОЩНОСТИ | 2002 |
|
RU2232085C2 |
| Способ компенсации обменной мощности в электрической системе | 1987 |
|
SU1607044A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2017 |
|
RU2668346C1 |
| Способ динамической компенсации неактивных составляющих мощности | 1988 |
|
SU1624598A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2012 |
|
RU2506677C1 |
| Устройство компенсации реактивного тока | 1988 |
|
SU1617528A1 |
Изобретение относится к электроэнергетике и электротехнике, в частности к компенсации реактивных нагрузок в промышленных и автономных электрических сетях с помощью статических вентильных компенсаторов. Цель изобретения - повышение точности компенсации искажений токов и расширение функциональных возможностей при несинусоидальном питающем напряжении в многофазных цепях с нелинейными элементами. Проводятся компенсация искажений тока за счет разделения тока нагрузки Iн (T) на две составляющие - активную Iа (T) и реактивную Iр (T) и последующая компенсация реактивной составляющей Iр (T) посредством подключения к входным зажимам каждой фазы источника питания одной фазы многофазного компенсатора, представляющего собой источник заданной формы тока. Для расширения функциональных возможностей и повышения точности компенсации при наличии длительных интервалов периода работы, когда одноименные I-е фазы источника питания и компенсатора искажений тока работают в генераторном режиме или I-я фаза компенсатора работает в генераторном режиме, а I-я фаза нагрузки - в режиме потребления энергии, предлагается I-ю фазу компенсатора подключить к I-й фазе источника питания, имеющей на этом интервале противоположную полярность по сравнению с I-й фазой нагрузки. 2 ил.
| Супрунович Г | |||
| Улучшение коэффициента мощности преобразовательных установок | |||
| М.: Энергоатомиздат, 1985, разд | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| -Там же, раздел 4.5. | |||
